Изобретение относится к измерительной технике и может быть использовано для контроля линейных перемещений объектов вдоль продольной оси при возможности одновременных небольших смещений в поперечной плоскости.
Известен индуктивный преобразователь перемещений, содержащий пару обмоток трапецеидальной формы и ферромагнитный якорь со скошенными боковыми поверхностями.
Его недостатком является низкая точность, обусловленная нестабильностью зазора между якорем и торцевой плоскостью трапецеидальных обмоток.
Наиболее близким к изобретению по техническому решению является индуктивный преобразователь линейных перемещений, содержащий две последовательно встречно включенные обмотки
в форме трапеций с обращенными в противоположные стороны параллельными одноименными основаниями и размещенный на продольной оси симметрии между ними ферромагнитный якорь. Обе обмотки установлены в параллельных плоскостях, а якорь выполнен в виде прямоугольного стержня, обращенного торцами к плоскостям трапецеидальных обмоток..
Недостатком этого преобразователя является низкая точность, обусловленная погрешностью от смещений якоря в поперечной плоскости, перпендикулярной продольной оси симметрии.
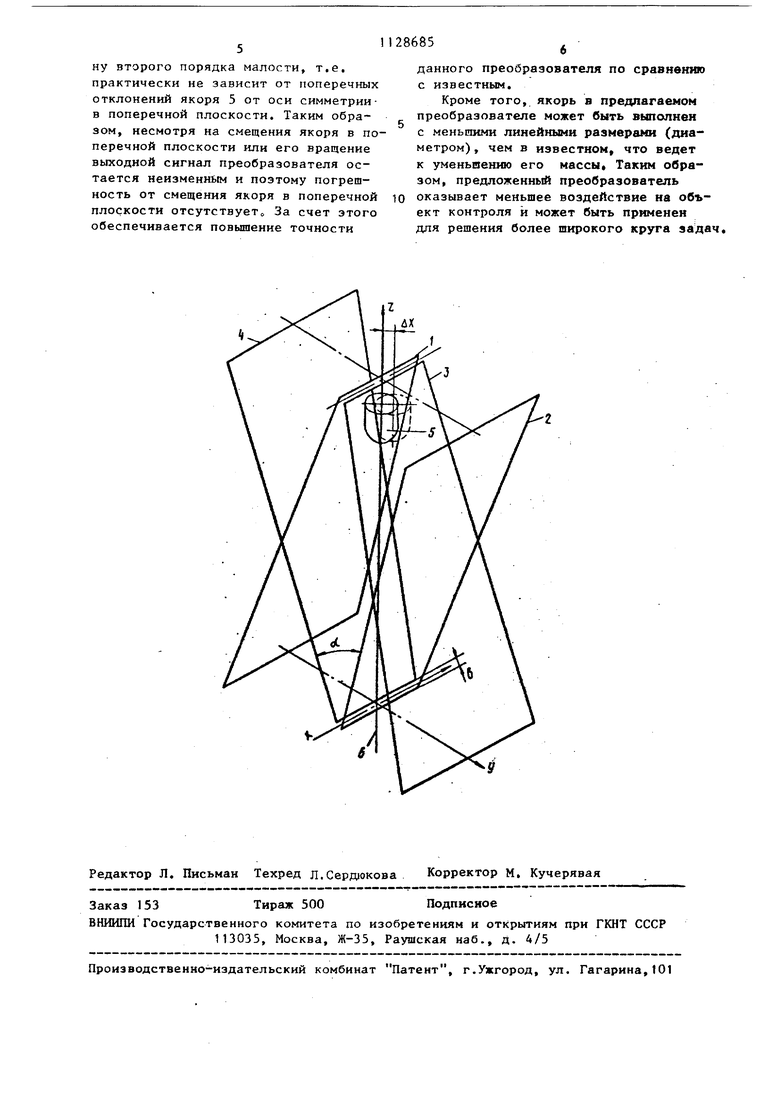
Целью изобретения является повьш1ение точности путем устранения погрешности от смещений якоря в поперечной плоскости. Эта цель достигается тем, что индуктивный преобразователь линейных перемещений, содержащий две последовательно встречно включенные обмоткив форме трапеций с обращенными в противоположные стороны параллельными одноименными основаниями и размещенный на продольной оси симметрии между ними ферромагнитный якорь, снабжен двумя дополнительными обмотками, вьтолненными аналогично основным обмоткам, пары обмоток с обращен ными в одну сторону мальми основания ми трапеций размещены в плоскостях, наклоненных друг к другу под углом, сходящимся в сторону малы: оснований трапеций, и включены между собой согласно, а ферромагнитный якорь выпол нен в виде тела вращения, диаметр ко торого меньше, чем расстояние между малыми основаниями трапеций. На чертеже приведено схематическо изображение преобразователя. Преобразователь содержит основную обмотку 1 в форме трапеции с малым основанием, обращенным вниз, основную обмотку 2 в форме трапеции с малым основанием, обращенным в противо положную сторону, т.е. вверх, выполненные аналогично основньш обмоткам 1 и 2 дополнительные обмотки 3 и 4, и ферромагнитный якорь 5, которЕяй вы полнен в виде тела вращения и размещен между обмотками 1-4 на продольно оси 6 симметрии преобразователя, которая совпадает с направлением контролируемых перемещений и с продольной осью якоря 5. Основная обмотка 1 и дополнительная обмотка 3, образующие пару обмоток с обращенными в одну сторону малыми основаниями трапеций, включены между собой последовательно согласно и размещены в наклоненных друг к дру гу плоскостях, образующих угол о( и сходящихся к малым основаниям трапеций, расстояние между которыми равно Ь. Пары обмоток 1,3 и 2,4 соедине ны метзду собой встречно и подключены к вторичному преобразователю индуктивного сопротивления в электрически сигнал (на чертеже не показан). 51корь 5 вьшолнен. с возможностью перемещения как вдоль оси 6 продольной симметрии преобразователя, совпа дающей с осью Z, так и с возможность малых перемещений ( дрейфа ) в направлениях по осям X и Y, перпендикулярных к оси Z, а также с возможностью вращения вокруг собственной оси Якорь 5 выполнен с диаметром, меньшим чем расстояние b между малыми основаниями трапеций, Мин;1мальньм размер диаметра и высоты якоря выбирается исходя из требований к чувствительности преобразователя и диапазону контролируемых перемещений. Преобразователь работает следующим образом. Исходным положением якоря 5 является центр поперечной симметрии преобразователя на Оси 6, соответствующий точке ее пересечения с плоскостью медиан трапеций. В этом положении индуктивные сопротивления всех обмоток равны и выходной сигнал преобразователя равен нулю. При перемещении якоря 5, например вверх, в положение, указанное на чертеже, уменьщается расстояние от якоря до плоскостей пары обмоток 1 и 3, что приводит к возрастанию их суммарной индуктивности. Одновременно увеличивается расстояние якоря 5 до плоскостей пары обмоток 2 и 4, что приводит к уменьшению их суммарной индуктивности. Изменение индуктивньгх сопротивлений этих пар обмоток в противоположных направлениях преобразуется с помощью вторичного преобразователя в пропорциональную величину электрического сигнала. Вследствие дифференциального встречного включения пар обмоток 1,3 и 2,4 обеспечивается линейность преобразования контролируемого продольного перемещения якоря 5 в электрический сигнал Так как якорь 5 обладает симметричной формой относительно своей оси, его вращение, очевидно, не приводит к изменению величин индуктивностей обмоток 1-4 При отклонении якоря 5 от оси 6 симметрии в поперечной плоскости по направлениям X и Y суммарная индуктивность пар обмоток 1,3 и 2,4 остается постоянной с точностью до величины первого порядка малости, так как индуктивность одной из обмоток пары возрастает, а другой обмотки падает Имеющиеся незначительные измерения суммарной индуктивности обмоток каждой пары совпадают по закону. При этом, вследствие дифференциального включения, разность изменений суммарной индуктивности пар обмоток имеет величину второго порядка малости, т.е. практически не зависит от поперечных отклонений якоря 5 от оси симметриив поперечной плоскости. Таким образом, несмотря на смещения якоря в поперечной плоскости или его вращение выходной сигнал преобразователя остается неизменным и поэтому погрешность от смещения якоря в поперечной плоскости отсутствует За счет этого обеспечивается повышение точности
данного преобразователя по сравнению с известным.
Кроме того, якорь а предлагаемом преобразователе может быть выполнен с меньпшми линейными размерами (диаметром) , чем в известном, что ведет к уменызению его массы Таким образом, предложенный преобразователь оказывает меньшее воздействие на объект контроля и может быть применен для решения более широкого круга зада
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТИВНО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ИЗМЕРИТЕЛЯ ЭКСЦЕНТРИЧНОСТИ ЭЛЕКТРИЧЕСКОГО КАБЕЛЯ | 2010 |
|
RU2422766C1 |
| ИНДУКТИВНО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ИЗМЕРИТЕЛЯ ЭКСЦЕНТРИЧНОСТИ ЭЛЕКТРИЧЕСКОГО КАБЕЛЯ | 2005 |
|
RU2300737C1 |
| Индуктивный преобразователь линейного перемещения | 1981 |
|
SU991170A1 |
| Индуктивный преобразователь линейных перемещений | 1991 |
|
SU1827528A1 |
| Трансформаторный датчик угловых перемещений | 1981 |
|
SU974110A1 |
| Преобразователь линейного перемещения | 1989 |
|
SU1758412A1 |
| СИСТЕМА ВЫСОКОСКОРОСТНОГО НАЗЕМНОГО ТРАНСПОРТА | 1992 |
|
RU2025319C1 |
| Индуктивно-трансформаторный датчик перемещений | 1988 |
|
SU1516747A1 |
| Электромагнитный механизм | 1981 |
|
SU954878A1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2252422C1 |
ИНДУКТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕ1Г1ЕНИЙ, содержащий две последовательно встречно включенные обмотки в форме трапеций с обращенными в противоположные стороны параллельными одноименными основаниями и размещенный на продольной оси симметрии между ними ферромагнитный якорь, отличающийся тем, что, с целью повышения точности путем устранения погрепшости от смещения якоря н поперечной плоскости, он снабжен двумя дополнительными обмотками, выполненными аналогично основным обмоткам, пары обмоток с обращенными в одну сторону малыми основаниями трапеций размещены в плоскостях, наклонных друг к другу под углом, сходящимся в сторону малых оснований трапеций и включены между собой согласно, а ферромагнитный якорь выполнен в виде тела вращения, диаметр которого меньше, чем расстояние меж ду малыми основаниями трапеций о (/)
| Электроиндуктивный датчик перемещений | 1972 |
|
SU443247A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
