товые входы которых соединены с тактовым входом блока ци4ч ового управления и выходом генератора так товой частоты, причем третьи входы первого и второго ре1Д1ркупяторов являются соответственно первым и вт рым входами преобразователя масштаба, а ВЫХОДЫ первого, второго и третьего рециркуляторов являются соответственно первым, вторым и третьим выходами управляемого преобразователя временного масштаба сигналов, входом управления которог является вход управления блока цифр вого управления. 3. Устройство по п.2, отличающееся тем, чго рециркулятор содержит последовательно соединенные переключатель входов, двоичньй регистр сдвига и выходной ключ, при этом первый вход переключателя входов подключен к выходу двоичного регистра сдвига, тактовый вход кото рого является тактовым входом рецир кулятора, а вторые входы переключа3теля входов и выходного ключа являются соответственно третьим и вторым входами управления, причем вход управления переключателя входов рециркулятора является первым входом управления, а выход выходного ключа - выходом рециркулятора. 4, Устройство по п.2, отличающееся тем, что блок цифрового управления содержит последовательно соединенные триггер, схему совпадений, первьй, второй и третий делители частоты, а также одновибратор, вход которого подключен к выходу триггера, вход сброса которого соединен с выходом третьего делителя. частоты, при этом выходы одновибратора, а также выходы первого и второго делителей частоты являются соответственно первым, вторым и третьим выходами блока цифрового управления, а вход установки в 1 триггера и второй вход схемы совпадений являются соответственно входом управления и тактовым входом блока цифрового управления.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регистрации сигналов при ультразвуковом контроле и устройство для его осуществления | 1989 |
|
SU1820319A1 |
| Коррелометр | 1980 |
|
SU1062717A1 |
| ЦИФРОВОЙ ГРУППОВОЙ ПРИЕМНИК СИГНАЛОВ УПРАВЛЕНИЯ И ВЗАИМОДЕЙСТВИЯ С АДАПТИВНОЙ ДИФФЕРЕНЦИАЛЬНОЙ ИМПУЛЬСНО-КОДОВОЙ МОДУЛЯЦИЕЙ | 1993 |
|
RU2103840C1 |
| Цифровой знаковый коррелометр | 1980 |
|
SU962975A1 |
| Цифровой коррелометр | 1980 |
|
SU903893A1 |
| Групповой приемник сигналов управления и взаимодействия с адаптивной дифференциальной импульсно-кодовой модуляцией | 1991 |
|
SU1829126A1 |
| Адаптивный цифровой корректор | 1982 |
|
SU1083379A1 |
| Коррелометр | 1980 |
|
SU881762A1 |
| Высокочастотный коррелометр | 1976 |
|
SU647689A1 |
| Многоканальный многомерный цифровой коррелометр | 1984 |
|
SU1187177A1 |
Г. УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА, содержащее излучающий электроакустический преобразователь, блок адапта1дии, генератор импульсных сигналов, выход которого соединен с излучающим электроакустическим преобразователем и первым входом блока адаптации, а вход - с первым выходом блока адаптации, два приемных канала, состоящих из последовательно соединённых приемных электроакустических преобразователей, усилителей, . блоков стробирования, детектирования и дискриминаторов знака производной, первый и второй знаковые коррелометры сдвиговой регистр, причем первые входы первого и второго знаковых коррелометров соединены с входом сдвигового регистра, выход которого подключен к второму входу первого знакового коррелометра, выход которо го подключен к последовательно соединенным сравнивающему устройству, генератору тактовой частоты, измерителю частоты, отсчетному устройству. при этом второй выход генератора тактовой частоты соединен с тактовым входом сдвигового регистра, а выход второго знакового коррелометт ра - с вторым входом сравнивакицего устройства, второй выход блока адаптации соединен с вторыми входами блоков стробирования, а второй вход блока адаптации соединен с выходом усилителя первого приемного канала, отличающееся тем, что, с целью повышения быстродействия, оно снабжено управляемым преобразователем временного масштаба сигналов, при этом его первый и второй входы соединены соответственно с выходами дискриминаторов знака производной первого и второго приемных каналов, вход управления преобразователя вре.менного масштаба сигналов подключен к второму выходу Ьлока адаптации, а первьй, второй и третий выходы преобразователя временного масштаба сигналов соединены соответственно с первыми входами первого и второго знаковых коррелометров, с вторым входом второго знакового коррелометра и входами управления обоих знаковых коррелометров. 2. Устройство ПОП.1, отличающееся тем, что управляемый преобразователь временного масштаба сигналов содержит три рециркулятора, .блок цифрового управления и генератор тактовой частоты, при этом третий вход третьего рециркулятора соединен с первым выходом блока цифрового управления, второй и третий выходы которого подключены соответственно к второму и первому входам управления трех рециркуляторов, так
I
ч f
Изобретение относится к морской навигационной технике и может быть применено на суднах и других плавающих объектах для определения скорости судна относительно дна.
Известен корреляционный измеритель скорости движения судна относительно дна, содержащий , излучатель, два приемника, расположенных в горизонтальной плоскости, усилители, детекторы и коррелометр с блоком регулируемой временной задержки l .
Однако при измерении скорости затрачивается большое время на проведение корреляционного анализа огибающих отраженных сигналов, вследствие чего ограничивается величина ускорений, при которых возможно измерение скорости в реальном масшта бе времени.
Наиболее близким к предлагаемому по технической супщости и достигаемому результату является устройство
для определения скорости движения судна относительно дна, содержащее излучающ11Й электроакустический преоб разователь, генератор импульсных сигналов, два приемных канала, состоящих из последовательно соединенных приемных электроакустических преобразователей, усилителей, блок стробирования и детектирования, сдвиговый регистр, первый знаковый коррелометр и регистратор, а также блок адаптации, два дискриминатора знака производной, второй знаковый коррелометр и регистрируннцее устройство, выполненное в виде последовательно соединенных блока сравнения, генератора тактовой частоты, измерителя частоты и отсчетного устройства, при этом входы блока адаптации подключены к выходу одного из.усилителей и к выходу генератора сигналов, а выходы - к входу генератора импульсных сигналов и второму входу блоков стробирования, входы дискриминаторов
знака производной подключены к выходам блоков детектирования, выход первого дискриминатора соединен с первыми входами коррелометрор и входом сдвигового регистра, выход второго дискриминатора соединен с вторым входом второго коррелометра, выходы коррелометра соединены с входами сравнивающего устройства, а второй выход генератора тактовой ча тоты подключен к тактовому входу сдвигового регистра а также измеритель частоты, вход которого подключен к выходу генератора так- товой частоты, а выход к входу отсчетного устройства Г2| .
Недостатком известного устройства является большое время измерения скорости, необходимое для проведени корреляционного анализа огибающей сигналов, отраженньпс от дна, и для уравновешивания следящей системы автоматического регулирования аргумента а в токор реляционной функции.
Цель изобретения - повьппение бысродействия устройства для обеспечения измерения изменяющейся скорости движения судов в реальном масштабе времени при существующем диапазоне ускорений.
Поставленная цель достигается тем, что в устройство для определения скорости движения судна относительно дна, содержащее излучающий электроакустический преобра.зователь блок адаптации, генератор импульсных сигналов, выход которого соеди иен с излучающим электроакустически преобразрвателем и первым входом блока-адаптации, а вход - с первым выходом блока адаптации, два приемных канала, состоящих из последовательна соединенных приемных электроакустических преобразователей, усилителей, блоков стробирования, детактирования и дискриминаторов знак производной, первый и второй знаков коррелометры, сдвиговый регистр, причем первые входы первого и второго знаковых коррелометров соединены с входом сдвигового регистра, выход которого подключен к второму входу первого знакового коррелометра, выход которого подключен к последовательно соединенным сравнивающему устройству, генератору тактовой частоты, измерителю частоты, отсчетному устройству, при этом второй
выход генератора тактовой частоты соединен с тактовым входом сдвигового регистра, а выход второго знакового коррелометра - с вторым входом сравнивающего устройства, второй выход блока адаптг1ции соединен с вторыми входами блоков стробировани а второй вход блока адаптации соединен с выходом усилителя первого приемного канала, дополнительно введен управляемый преобразователе временного масштаба сигналов, при этом его первый и второй входы соедин-ены соответственно с выходами дискрдамнаторов знака производной первого и второго приемных каналов, вход управдения управляемого преобразователя временного масштаба сигналов подключен к второму выходу блока адаптации, а первый, второй и третий лыходы управпяемого преобразователя временного масштаба сигналов соединены соответственно с первыми входами первого и второго знаковых коррелометров и входом сдвигового регистра, с вторым входом второго знакового коррелометра и входами управления обоих знаковых коррелометров.
Управляемый преобразователь временного масштаба сигналов содержит три рециркулятора, блок цифрового управления и генератор тактовой частоты, при этом третий вход третьего рециркулятора соединен с первым выходом блока цифрового управления, второй и третий выходы которого подключены соответственно к второму и первому вкодам управления трех рециркуляторов, тактовые входы которых соединены с тактовым входом блока цифрового управления и выходом генератора тактовой частоты, при этом третьи входы первого и второго рециркуляторов являются соответственно первым и вторым входами преобразователя масштаба, а выходы первого. второго, и третьего рециркупяторов являются соответственно первым, вторым и третьим выходами управляемого преобразователя временного масштаба сигналов, управляющим входоя которого является вход управле1шя блока цифрового управления.
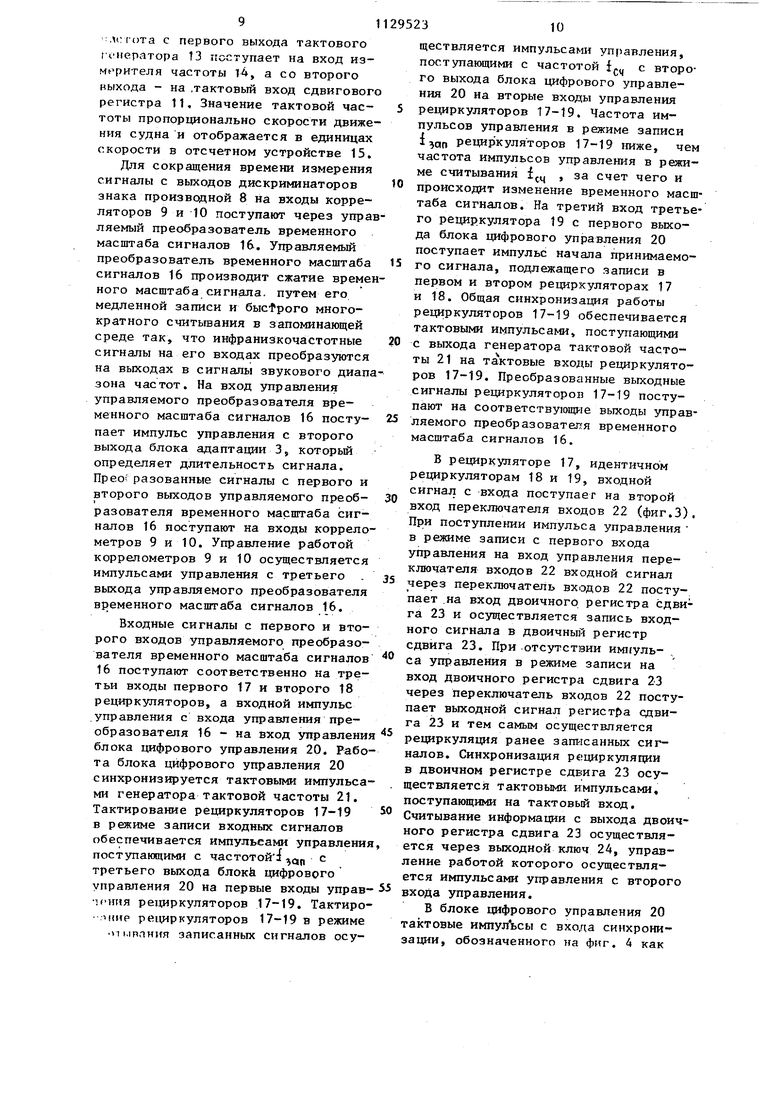
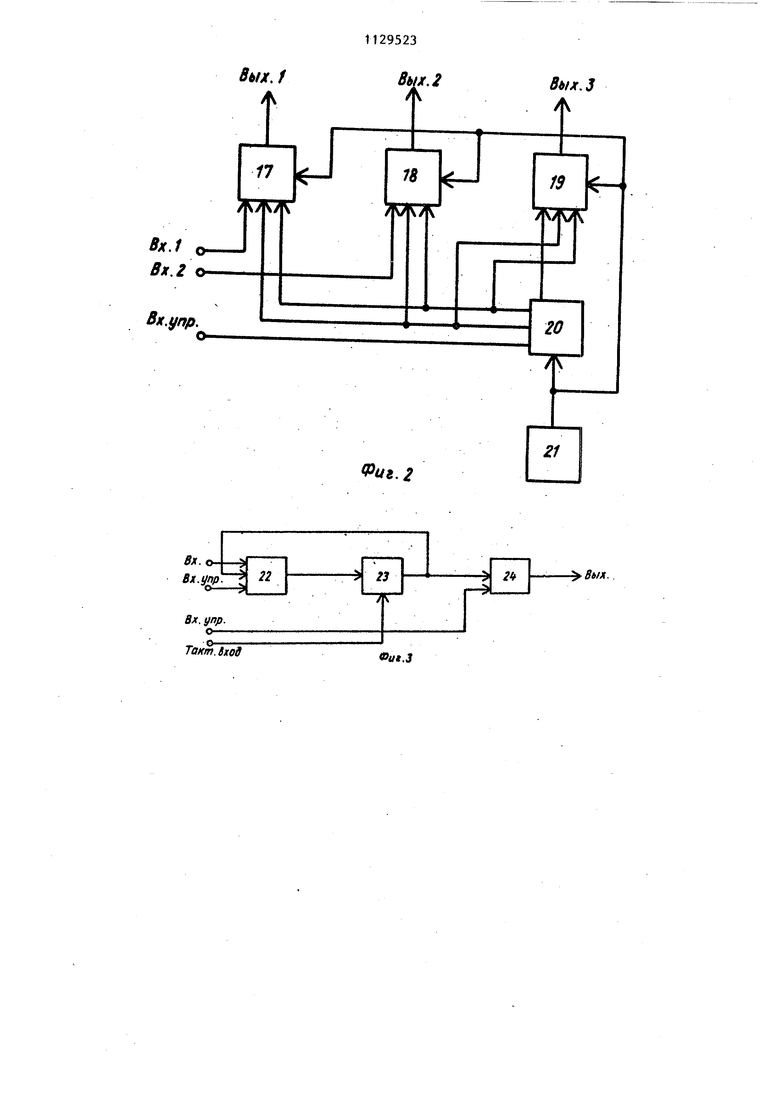
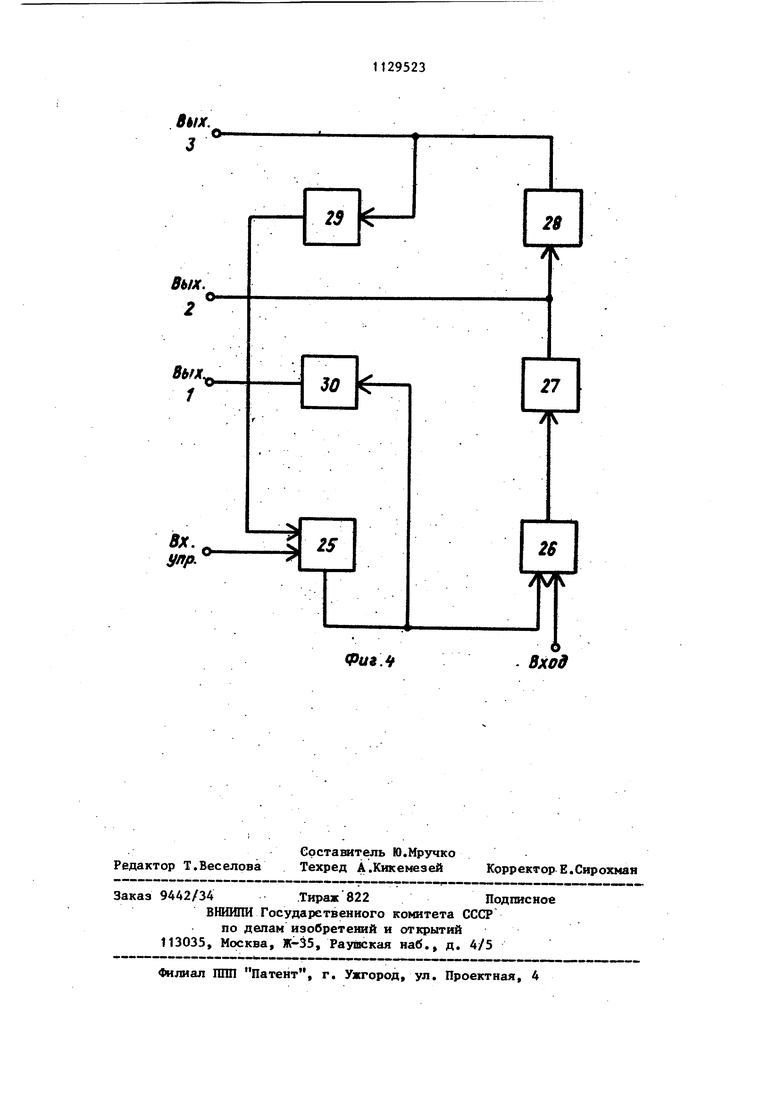
Каждый рециркулятор последовательно соединенные переключатель входов, двоичный регистр сдвига и выходной ключ, при этом первый вход переключателя входов подключен к выходу двоичного регистра сдвига, тактовый вход которого является тактовым входом рециркулятора, вход управления переключателя входов рециркулятора является первым входом управления, вторые входы переключате ля входов и выходного ключа являются соответственно третьим и вторым входами управления, а выход выходного ключа является выходом рециркулятора,. Блок цифрового управления содержит последовательно соединенные триггер, схему совпадений, первьй второй и третий делители частоты, а также одновибратор, вход которого подключен к вьрсоду триггера, вход сброса которого соединен с выходом третьего делителя частоты, при этом выходы одновибратора, а также выходы первого и второго делителей частоты являются соответственно первым, вторым и третьим выходами блока цифрового управления, а вход установ ки в 1 триггера и второй вход схеMJ совпадений являются соответственно входом управления и тактовым входом блока цифрового управления. Ня фиг. 1 представлена блок-схема предлагаемого устройства. Устройство содержит генератор импульсных сигналов 1, выход которо го соединен с излучающим электроаку тическим преобразователем 2, а вход с первым выходом блока адаптации 3, два приемных канала, состоящих из последовательно соединенных приемны электроакустических преобр азователе 4, усилителей 5, блоков стробирова- ния 6, детектирования 7, дискрймина торов знака производной 8, первый знаковый коррелометр 9 и второй знаковый коррелометр 10, причем пер вые входы первого 9 и второго 10 зн ковых коррелометров соединены с вхо дом сдвигового регистра 11, выход которого подклю.чен к второму входу первого знакового коррелометра 9, выход которого подключен к последовательно соединенным сравнивающему устройству 12, генератору тактовой час-Готы 13, измерителю частоты 14, отсчетному устройству 15. При-этом второй выход генератора тактовой частоты 13 соединен с тактовым входом сдвигового регистра 11, а выход второго знакового коррелометра 10 с вторым входом сравнивакяцего устро 11 36 ства 12. Кроме того, второй выход блока адаптации 3 соединен с вторыми входами блоков стробирования 6, первый вход блока адаптации 3 соединен с выходом генератора импульсных сигналов 1, а второй его вход - с выходом усилителя 5 первого приемного канала. Устройство содержит также управляемый преобразователь временного масштаба сигналов 16. Первый и второй входы управляемого преобразователя временного масштаба соединены соответственно с выходами дискриминаторов 8 знака производной первого и второго приемньк каналов. Вход управления преобразователя временного масштаба .сигналов 16 подключен к второму выходу блока адаптации 3. Первый, второй и третий выходы управляемого преобразователя временного масштаба сигналов 16 соединены соответственно с первыми входами первого 9 и второго 10 знаковых коррелометров и входом сдвигового регистра 11, с вторым входом второго знакового коррелометра 10 и с входами управления обоих знаковых коррелометров 9 и 10. , На фиг. 2 представлена блок-схема управляемого преобразователя временного масштаба сигналов 16. Управляемый преобразователь временного масштаба сигналов 16 содержит три рециркулятора 17-19, блок цифрового управления 20 и генератор тактовой частоты 21. Третий вход третьего.рециркулятора 19 соединен с .первым выходом блока цифрового управления 20. Второй и третий выходы блока цифрового управления 20 подключены соответственно к второму и первому входам управления трех рециркуляторов 17-19, тактовые входы которых соединены с тактовым входом блока цифрового управления 20 и выходом генератора тактовой частоты 21. При этом третьи входы первого 17 и второго 18 рециркуляторов являются соответственно первым и вторым входами управляемого преобразователя. Выходы первого 17, второго 18 и третьего 19 рециркуляторов являются соответственно первым, йторым и третьим выходами управляемого преобразс вателя. Вход управления блока цифрового управления 20 является входом управления преобра-эователя, На фиг. 3 представлена блок-схем .первого рециркулятора 17, полностью идентичного второму 18 и третьему 19 рециркуляторгм, Рециркулятор содержит последовательно соединенные переключатель входов 22, двоичньш регистр сдвига 23и выходной ключ 24„ Первый вход переключателя входов 22 подключен к выходу двоичного регистра сдвига 23 Тактовый вход двоичного регистра сдвига 23 является тактовым входом рециркулятора. Вторые входы переключателя входов 22 и вькодного ключа 24являются соответственно третьим .и вторым входаг-и управления, причем вход управления переключателя входов 22 является первым входом управления, а выход выходного ключа 24 - вы ходом р-ециркулятора 17, На фиг. 4 представлена блок-схема блока цифрового управления 20. Блок цифрового управления 20 содержит последовательно соеданенные триггер 25, схему совпадений 26, пер вьй 27, второй 28 и третий 29 делители частоты,а также одновибратор 30. Вход одновибратора 30 подключен к выходу триггера 25. Вход сброса триггера 25 соединен с выходом третьего делителя частоты 29, при этом выходы.одновибратора 30, первого 27 и второго 28 делителей частоты являются соответственно перв.ым вторым и третьим выходами блока цифрового управления 20. Вход установки в 1 триггера 25 является входом управления. Второй вход схемы совпадений 26 является тактовым входом блока цифрового управления 20 Устройство работает следующим об разом. Генератор импульсных сигналов 1 генерирует электрический импуяьс с высокочастотным заполнением. Частот -заполнения импульса равна резонансной частоте излучающего электроакус тического преобразователя 2. Этот импульс с выхода генератора импульс ных сигналов 1 поступает на один из входов блока адаптации 3 и на излучающий электроакустический преобразователь- 2,, которьй преобразует его в акустический сигнал. Акустический сигнал излучается излучающим .электроакустическим преобразовате38лем 2 в направлении дна. Достигнув дна, акустический сигнал отражается от него и поступает в разнесенные по горизонтали и закрепленные в днище судна приемные электроакустические преобразователи 4, которые преобразуют отраженный от дна акустический сигнал в электрические сигналы. С выходов приемных электроакустических преобразователей 4 первого и второго приемных каналов эл трические сигналы поступают на входы усилителей 5 и усиливаются в них, С выхода усилителя 5 первого прйемного канала усиленный сигнал поступает на второй вход блока адаптации 3, с второго выхода которого стробирующий импульс поступает на вторые входы блоков стробирования 6. Строби-. рующий импульс с второго выходи блока адаптации 3 определяет длительность и частоту выборок сигнала в блоке стробирования 6, а также период и частоту посылок с генератора импульсных сигналов 1, в зависимости от глубины места, путем -воздейстг ВИЯ на его вход управляющим сигналом с первого выхода блока адаптации. 3. Сигналы, усиленные в усилителях 5, поступают на входы блоков стробирования 6, выборки сигналов, длительность и частота которых определяется стробирующим импульсом-с второго выхода блока адаптации 3. С выходов блоков стробирования 6 сигналы поступают на входы блоков детекторов 7. Блоки детекторов 7 производят детектирование среднего значения амплитуды сигналов и выделяют их огибающую. Продетектированные сигналы с выходов блоков детекторов 7 поступают на входы дискриминаторов знака производной 8. В ди.скрими-наторах знака производной 8 огибающие амплитуды сигналов дифференцируются и в зависимости от знака производной выходным сигналом дискриминаторов присваиваются логические уровни О и 1. Таким образом, формируются две бинарные последовательности, используемые в качестве входных сигналов знаковых коррелометров 9 и 10. Выходные сигналы двух коррелометров 9 и 10 поступают на входы сравнивающего устройства 12, формирующего сигнал рассогласования, который поступает на вход управления генера- тактовой частоты 13. Тактовая
-лсгота с первого выхода тактового Пператора 3 поступает на вход измерителя частоты l4, а со второго выхода - на .тактовый вход сдвигового регистра 11, Значение тактовой частоты пропорционально скорости движения судна и отображается в единицах скорости в отсчетном устройстве 15. Для сокращения времени измерения сигналы с выходов дискриминаторов знака производной 8 на входы корреляторов 9 и 10 поступают через управляемый преобразователь временного масштаба сигналов 1&. Управляемый преобразователь временного масштаба сигналов 16 производит сжатие временного масштаба сигнала, путем его медленной записи и быcfpoгo многократного считывания в запоминающей среде так, что инфранизкочастотные сигналы на его входах преобразуются на выходах в сигналы звукового диапазона частот. На вход управления управляемого преобразователя временного масштаба сигналов 16 поступает импульс управления с второго выхода блока адаптации 3, который определяет длительность сигнала. Преобразованные сигналы с первого и второго выходов управляемого преобразователя временного масштаба сигналов 16 поступают на входы коррелометров 9 и 10. Управление работой коррелометров 9 и 10 осуществляется импульсами управления с третьего . выхода управляемого преобразователя временного масштаба сигналов 16.
Входные сигналы с первого и второго входов управляемого преобразователя временного масштаба сигналов 16 поступают соответственно на третьи входы первого 17 и второго 18 рециркуляторов, а входной импульс управления с входа упранления преобразователя 16 - на вход управлени блока цифрового управления 20. Работа блока цифрового управления 20 синхронизируется тактовыми импульса ми генератора тактовой частоты 21. Тактирование рециркуляторов 17-19 в режиме записи входных сигналов обеспечивается импульсами управлени поступающими с частотой с третьего выхода блоки цифрового управления 20 на первые входы управ кння рециркуляторов 17-19. Тактиро мине рец ркуляторов 17-19 в режиме чиппния записанных сигналов осуществляется импульсами управления, поступающими с частотой i., с второго выхода блока цифрового управления 20 на вторые входы управления рециркуляторов 17-19. Частота импульсов управления в режиме записи f,pf, рециркуляторов 17-19 ниже, чем частота импульсов управления в режиме считывания , за счет чего и происходит изменение временного масштаба сигналов. На третий вход третьего рециркулятора 19 с первого вькода блока цифрового управления 20 поступает импульс начала принимаемого сигнала, подлежащего записи в первом и втором рециркуляторах 17 и 18. Общая синхронизация работы рециркуляторов 17-19 обеспечивается тактовыми импульсами, поступающими с выхода генератора тактовой частоты 21 на тактовые входы рециркуляторов 17-19. Преобразованные выходные сигналы рециркуляторон 17-19 поступают на соответствующие выходы управляемого преобразователя временного масштаба сигналов 16.
В рециркуляторе 17, идентичном рециркуляторам 18 и 19, входной сигнал с входа поступает на второй вход переключателя входов 22 (фиг.З) При поступлении импульса управления в режиме записи с первого входа управления на вход управления переключателя входов 22 входной сигнал через переключатель входов 22 поступает .на вход двоичного регистра сдвига 23 и осуществляется запись входного сигнала в двоичный регистр сдвига 23. При отсутствии ишгульса управления в режиме записи на вход двоичного регистра сдвига 23 через переключатель входов 22 поступает выходной сигнал регистра сдвига 23 и тем самым осуществляется рециркуляция ранее записанных сигналов. Синхронизация рециркуляции в двоичном регистре сдвига 23 осуществляется тактовыми импульсами, поступающими на тактовый вход. Считывание информации с выхода двоичного регистра сдвига 23 осуществляется через выходной ключ 24, управление работой которого осуществляется импульсами управления с второго входа управления.
В блоке цифрового управления 20 тактовые импульсы с входа синхронизации, обозначенного на фиг. 4 как 11 Вход, поступают через схему совпа дений 26 на последовательно соединенные первый 27, второй 28 и трети 29 делители частоты. Выходной сигнал третьего делителя частоты 29 поступает на вход сброса триггера 25. Триггер 25 устанавливается в 1 по импульсу управления, поступа щему с входа управления-, и открьгоае схему совпадений 26. При переходе триггера 25 и нулевого в единичное состояние, по переднему фронту этого перехода, одновибратор 30 формирует импульс начала принимаемого сигнала, который поступает на первый выход блока цифрового управления 20, На второй выход блока цифро вого управления 20 с выхода первого делителя частоты 27. поступают импульсы управления с частотой , определяющие режим- считывания. На третий выход блока дафрового управ312ления 20 поступают импульсы управления с выхода второго делителя частоты 28 с частотой f определяющие режим записи. Отношение частоты импульсов управления в режиме считывания f {.ц к импульсам управу ления в режиме записи f п определяет коэффициент транспортирования или увеличения быстродействия: .. сч тр эап Предлагаемое устройство увеличит вает быстродействие измерения (в К раз). В макете предлагаемого устройства было выбрано равным 512, что позволило производить измерения абсолютной скорости движения судна относительно дна в реальном масштабе времени во всем диапазоне изменения скорости движения судна.
Вых. 1
17
Вх.1 оВх.г
х.2
Вых, J Л А
1В
13
VV4
Sx.ynp.
Такт, йход
.2
9ut.3
Вход
Фиг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения скорости движения судна относительно дна | 1976 |
|
SU640209A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 813255, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
