1 Изобретение относится к устройст вам для координированного управления движением транспорта и может быть использовано для синхронизированного включения светофоров в зависимости от параметров транспортно го потока на отдельных городских магистралях или в районах города. Известно устройство для управления движением транспорта, содержаще центральное управляющее устройство периферийные блоки, каждый из которых имеет накопители, настраивающие ся по одинаковму количеству двоичных разрядов в последовательно выдаваемых импульсных группах и подключающиеся к распределителям разрядов. Накопители при смене сигналь ного цикла и получении с центрального управляняцего устройства команды в виде определённой группы импульсов с одинаковым количеством двоичных разрядов позволяют одновре менно настраивать все перекл1бчатели сигнальных ламп. В данном устройств возможна коррекция плана координации за счет изменения длительности фаз и временных сдвигов в Зависимости от плотности транспортных потоков путем изменения частоты тактовых импульсов, передавае№.гх с центрального управляющего устройства lj . Недостатком данного устройства является его сложность, обусловленная необходимостью- иметь в периферийных блоках буферные переключатели и счетчики. Кроме того, невозможно оперативное изменение последовательности переключения фаз из центрального управляющего устройства, так как эта последовательность задается в периферийных блоках. Наиболее близким по технической сущности к предлагаемому является устройство дпя управления дорожным движением, состоящее из Щ блоков обработки, каждый из которых содержит вычислительный блок, программны блок, блок управления, пульт управления, блок отображения, многофункциональный блок связи, входы и выходы пульта управления, вычислитель ного и программного блока соединены с соответствующими выходами и входами блока управления, связанно го с блоками управления предыдущего 33 и последующего блоков обработки, информационный выход блока управления соединен с блоком отображения, многофункциональный блок связи каждого блока обработки соединен с многофункциональными блоками связи предыдущего и последующего блоков обработки, информационные входы многофункционального блока связи каждого блока обработки соединены с соответствующими входами устройства, а з равляющий вход и выход - с соответствующими выходами и входом блока управления . Недостаток данного устройства заключается в том, что записанный план координации является жестким и рассчитывается заранее, исходя из статистических данных, и может не соответствовать рзальной дорожно-транспортной ситуации, что влечет за собой увеличение транспортных задержек. Цель изобретения - расширение области применения устройства. Поставленная цель достигается тем, что в устройство для координированного управления движением транспорта , содержащее программатор, первая и вторая группы выходов которого соединены с одноименными группами входов блока сравнения, группа выходов которого соединена с группой входов блока передачи, группа выходов которого является группой выходов устройства, вход программатора является входом устройства, вычислительный блок, введены делитель, усреднитель, элемент задержки, счетчик импульсов, реле времени, выход которого соединен с входом усреднителя, выход которого соединен с первым входом делителя, выходы которого соединены с соответствующими входами вычислительного блока, выход которого соединен с первым входом счетчика импульсов и через элемент задержки с вторым входом программатора, первыми выход которого соединен с вторьт входом счетчика импульсов, группа выходов, которого соединена с третьей группой входов блока сравнения, второй выход программатора соединен с вторым входом делителя, группа входов усреднителя является группой входов устройства. Кроме того, вычислительньш блок сЬдержит генератор, вычитающий счетчик, элемент задержки, элементы И, выходы которых соединены с информационными входами вычитающего счетчика, выход которого соединен с входом элемента задержки и является выходом вычислительного блока, выход элемента задержки соединен с первыми входами элементов И, вторые вхо,ды которых являются входами вычислительного блока, выход генератора соединен с управляющим входом вычитающего счетчика.
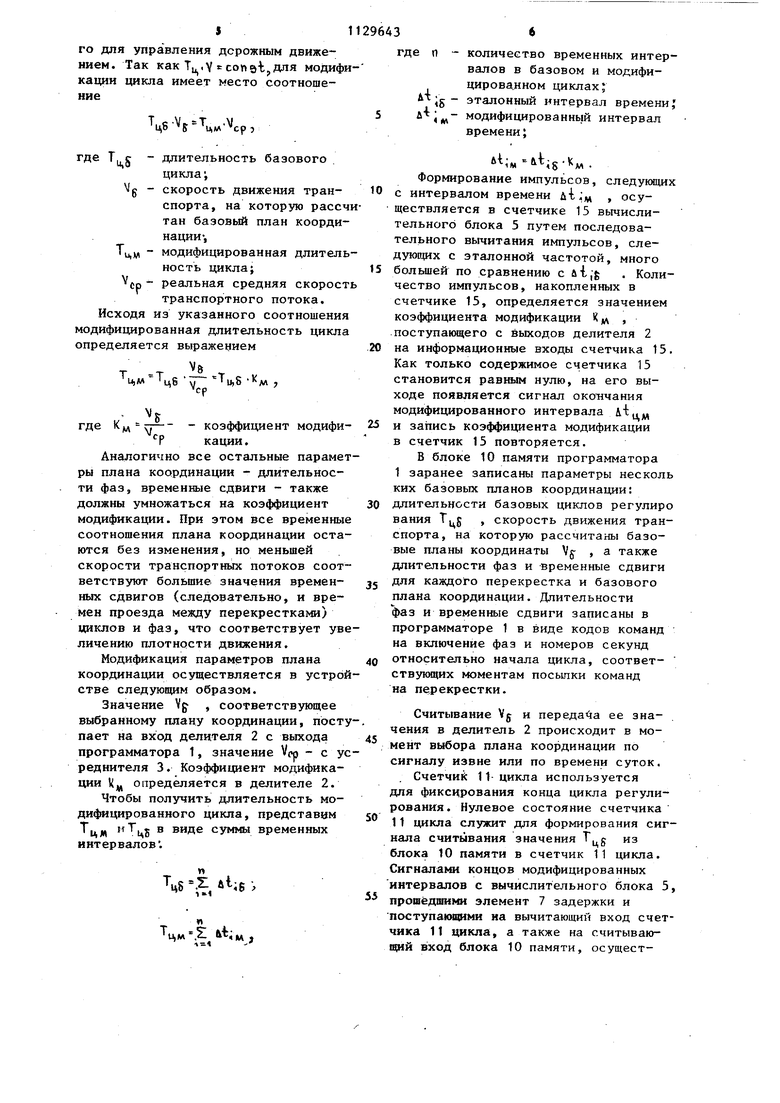
На чертеже представлена блок-схема устройства.
Устройство для координированного управления движением содержит программатор 1, делитель 2, усреднитель 3, реле 4 времени, вычислительный блок 5, счетчик 6 импульсов, элемент 7 задержки, блок 8 сравнения блок 9 передачи.
Программатор 1 содержит блок 10 памяти, счетчик 11 цикла.
Вычислительный блок 5 содержит
элементы 12-14 И, вычитающий счетчик 15, элемент 16 задержки,генератор 17.
Блок 8 сравнения содержит схему 1 сравнения, элементы 19....19 И.
Блок 9 передачи содержит преобразователи ...20.
Программатор 1 предназначен для запоминания параметров плана координации, таких как длительность цикла регулирования ( Тц ) , базового значения скорости движения транспорта ( Vg- ) 3 KOTopjno рассчитан план координации, длительности фаз и вр.еменных сдвигов для каждого перекрестка отдельно. Длительности.фаз и временные сдвиги представлены в программаторе 1 кодами команд на включение и выключение фаз и номерами секунд относительно начала цикла, соответствующих моментам посылки команд на перекрестке. Кроме того, программатор 1 предназначен для формирования сигнала конца цикла регулирования .
Делитель 2 предназначен для осуществления операции деления базового значения скорости Vf , соответствунщего выбранному плану координации, на среднее значение скорости транспортного потока, и может быть реализован в виде счетчийа, осуществляющего операцию последовательного вычитания делителя из делимого
до получения отрицательной разницы. Число разрядов частного определяетс требуемой точностью деления.
Усреднитель 3 предназначен для вычисления средней скорости движени транспорта и может быть выполнен в виде сумматора мгновенных значени скорости, счетчика количества полученнь1х мгновенных значений и специализированного вычислительного устройства, осуществлякндего операцию деления.
Вычислительный блок 5 предназначен для изменения периода следования импульсов в зависимости от длительности цикла регулирования.
Устройство работает следующим образом.
Сигналы, соответствующие значению мгновенной скорости автомобилей проходящих контролируемое сечение дороги, с детекторов скорости поступают на входы усреднителя 3, который при поступлении каждого значения мгновенной скорости осуществляет суммирование его с ранее накоплен.ным значением и деление суммы на количество мгновенных значений, определяя тем самым текущее .среднее значение скорости транспортных потоков.
Реле 4 времени по истечении периода усреднения, составляющего, например, 15-30 мин, выдает сигнал на вход усреднителя 3, по которому соответствующее значение средней скорости движения транспорта поступает на вход делителя 2 для определения необходимого коэффициента модификации.
Увеличение скорости транспортного потока соответствует уменьшению плотности движения, что ведет, в свою очередь, к уменьшению длительности цикла регулирования, поэтому произведение длительности цикла Тц на скорость движения транспорта V для небольших изменений значений скорости может быть принято величиной постоянной (Тц -V - consi).
Исходя из данного допущения изменение скорости транспортного потока, соответствующее изменению его плотности, требует пропорционального изменения (модификации) длительности цикла, временных сдвигов и длительностей фаз, т.е. параметров базового плана координации, выбранного для управления дорожным движением. Так как Тц.,,для модификации цикла имеет место соотношение
V-T M-Mcp,
Ц8где - длительность базового цикла i Vg - скорость движения транспорта, на которую расс тан базовый план коорди нации-, Тцу - модифицированная длител ность цикла; ср реальная средняя скорос транспортного потока. Исходя из указанного соотношени модифицированная длительность цикл определяется выражением т т ц6 1 u,S , где KMV коэффициент модифи Р кации. Аналогично все остальные параме ры плана координации - длительности фаз, временные сдвиги - также должны умножаться на коэффициент модификации. При этом все временны соотношения плана координации оста ются без изменения, но меньшей скорости транспортных потоков соот ветствуют большие значения временных сдвигов (следовательно, и времен проезда между перекрестками) циклов и фаз, что соответствует ув личению плотности движения. Модификация параметров плана координации осуществляется в устро стве следующим образом. Значение Vg , соответствующее выбранному плану координации, пост пает на вход делителя 2 с выхода программатора 1, значение с - с у реднителя 3. Коэффициент модификации Vj, определяется в делителе 2. Чтобы получить длительность модифицированного цикла, представим им иВ виде суммы временных интервалов. Тц5 ., Ai;6 ,
количество временных интервалов в базовом и модифицированном циклах; эталонный интервал времени, модифицированный интервал времени; . Формирование импульсов, следукидих с интервалом времени Д1;,ц , осуществляется в счетчике 15 вычислительного блока 5 путем последовательного вычитания импульсов, следующих с эталонной частотой, много большей по сравнению с aijg . Количество импульсов, накопленных в счетчике 15, определяется значением коэффициента модификации I ДА , поступающего с выходов делителя 2 на информационные входы счетчика 15. Как только содержимое счетчика 15 становится нулю, на его выходе появляется сигнал окончания модифицированного интервала itu, и запись коэффициента модификации в счетчик 15 повторяется. В блоке 10 памяти программатора Iзаранее записаны параметры несколь ких базовых планов координации: длительности базовых циклов регулиро вания Тц5 , скорость движения транспорта, на которую рассчитаны базовые планы координаты Vg- , а также длительности фаз и временные сдвиги для каждого перекрестка и базового плана координации. Длительности фаз и временные сдвиги записаны в программаторе 1 в виде кодов команд на включение фаз и номеров секунд относительно начала цикла, соответствующих моментам посьшки команд на перекрестки. Считывание Vg и переда 1а ее значения в делитель 2 происходит в момент выбора плана координации по сигналу извне или по времени суток. Счетчик 11- цикла используется для фиксирования конца цикла регулирования . Нулевое состояние счетчика I1цикла служит для формирования сигнала считывания значения из блока 10 памяти в счетчик 11 цикла. Сигналами концов модифицированных интервалов с вычислительного блока 5, прошедшими элемент 7 задержки и поступающими на вычитающий вход счетчика 11 Щ1кла, а также на считывающий вход блока 10 памяти, осущест7вляется последовательное вычитание из числа записанного в счетчике 11 цикла и считывание из блока 10 памя ти номеров секунд и соответствующих им кодов команд для выбранного плана координации. .Кроме того, по сигналам концов модифицированных интервалов, поступаюо х с выхода вычислительного блока 5, в счетчике 6 импульсов про исходит накопление количества секун в текущем цикле. В конце модифицированного цикла сигналом с выхода счетчика 11 цикла происходит установка счетчика 6 в нулевое состояние. Считаншле из блока 10 памяти номера секунд сравниваются с содержимым счетчика 6 импульсов. Сравнение происходит в конце модифицирова - ных интервалов. При равенстве содержимого счетчи ка 6 импульсов номеру секунды, считанному из блока 10 памяти, сигнал с выхода cxeNBd 18 сравнения посту38пает на входы элементов 19,...19 И и разрешает поступление кодов команд включения фаз управления для перекрестков на преобразователи 20...20п блока 9 передачи. Коды команд в преобразователях 20...20 блока 9 передачи преобразуются в сигналы, параметры которьвс обеспечивают передачу информации по линии связи на необходимые расстояния. Сигналы с блока 9 передачи передаются с учетом того, чтобы поддерживать на магистрали скорость движения V, подсчитанную усреднителем 3. Для исключения возможных сбоев время поступления команды существенно меньше модифицированного интервала. Элементы 7 и 16 задержки служат для разнесения во времени сигналов записи и считивания в счетчиках 15 и 6. Предлагаемое техническое решение позволяет без помоид ЭВМ осуществлять модификацию временных уставок цикла и сдвигов фаз.
fffoeeaimftfiam вМЮ 9
| название | год | авторы | номер документа |
|---|---|---|---|
| Обучающее устройство | 1984 |
|
SU1249566A1 |
| Модуль для программного управления электроприводом | 1987 |
|
SU1509832A1 |
| Устройство для контроля параметров транспортных потоков | 1984 |
|
SU1226511A1 |
| Способ управления движением транспортных потоков на перекрестке | 1986 |
|
SU1399800A1 |
| Устройство для разгона и торможения двигателя исполнительного механизма | 1986 |
|
SU1361507A1 |
| Устройство для измерения отношения сигнал/шум | 1983 |
|
SU1099404A1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ ЦИКЛИЧЕСКИ ФУНКЦИОНИРУЮЩИХ ОБЪЕКТОВ | 2000 |
|
RU2177607C1 |
| Устройство для измерения скорости перемещения | 1989 |
|
SU1732281A1 |
| Устройство для измерения отношения сигнал/шум | 1988 |
|
SU1598194A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ТРАНСПОРТА | 1968 |
|
SU217744A1 |
1. УСТРОЙСТВО ДЛЯ КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТА, содержащее программатор, первая и вторая группы выходов Которого соединены с одноим;внш 1ми группами входов блока сравнения, группа выходов которого соединена с группой входов блока передачи, группа выходов которого является группой выходов устройства, вход программатора является входом устройства, вычислительный блок, отличающееся тем, что, с целью расширения области применения устройства, в него введены делитель, усреднитель, элемент задержки, счетчик импульсов, реле времени, выход.которого соединен с входом усреднителя, выход которого соединен с первым входом делителя, выходы которого соединены с соответствующими входами вычислительного блока, выход которого соединен с первым входом счетчика импульсов и через элемент задержки с вторым входом программатора, первый выход которого соединен с вторым входом счетчика импульсов, группа выходов которого соединена с третьей группой входов блока сравнения, второй выход программатора соединен с вторым входом делителя, группа входов усреднителя является группой входов устройства. 2. Устройство по п. 1, отличающееся тем, 1то вычислительный блок содержит генератор, вычитающий счетчик, элемент задержки, элементы И, выходы которых соединены с информационными входами вычитающего счетчика,выход которого соединен с входом элемента задержки и является выходом.вычислительного 9 блока, выход элемента задержки соединен с первыми входами элементов И, вторые входы которых являются входами вычислительного блока, вы-. ход генератора соединен с управляю1 9 щим входом вычитающего счетчика.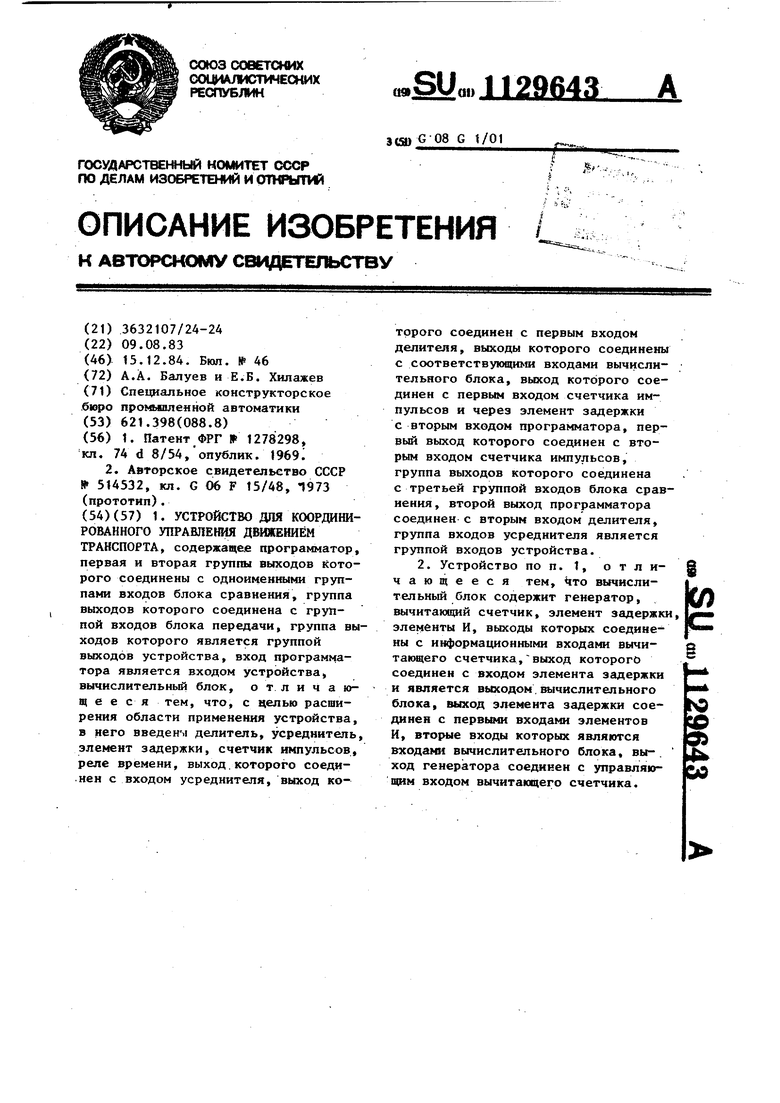
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения фосфорной кислоты | 1984 |
|
SU1278298A1 |
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Устройство для управления дорожным движением | 1973 |
|
SU514532A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
