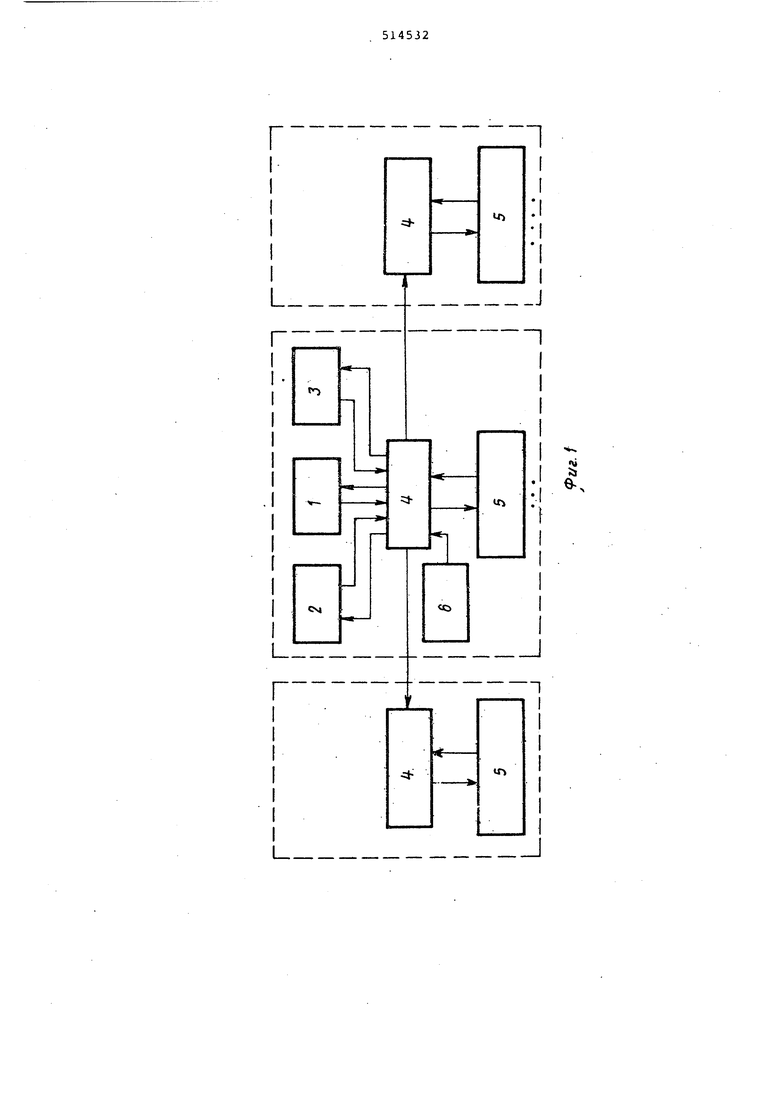
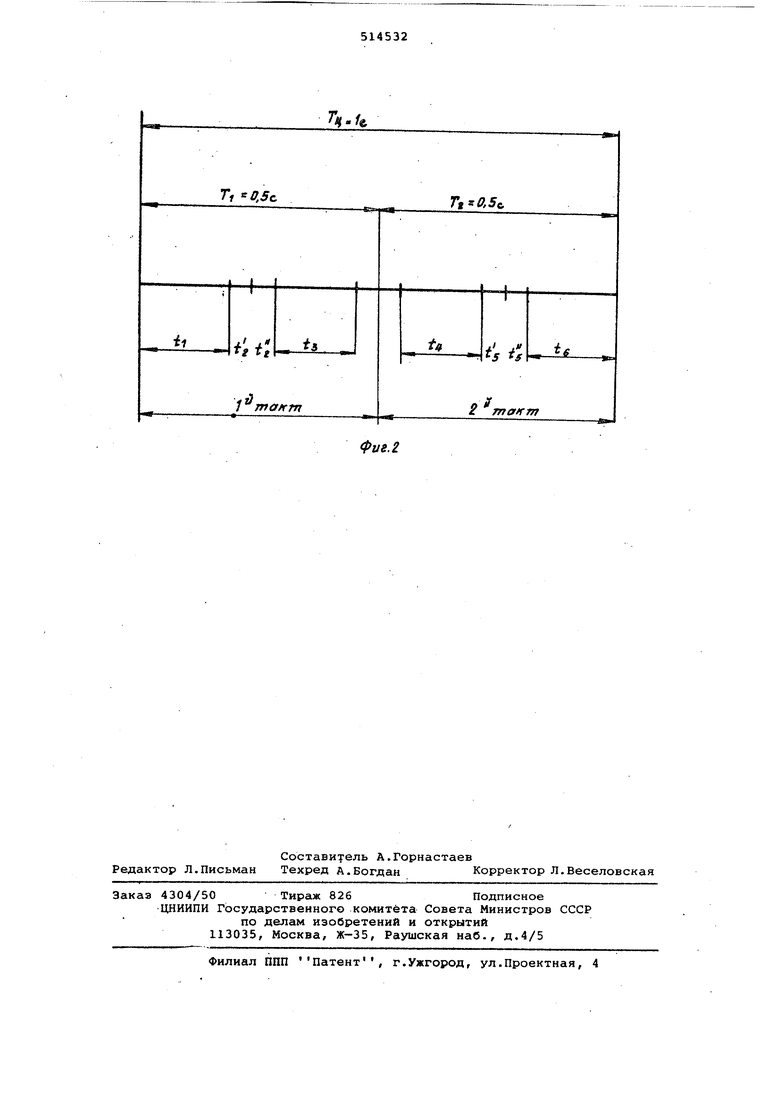
Изобретение предназначено для коо динированного управления светофорной сигнализацией в городском районе в соответствии с характеристиками тра спортных потоков. Областью применения устройства являются городские районы со значительным числом перекрестков , синхронизированные между собой по режимам управления светофорной сигнализацией. Известные устройства для управле ния дорожным движением состоят из т блоков обработки, каждый из которых содержит вычислительный узел, прогр мный узел, узел управления, пульт управления и узел отображения, причем входы и выходы пульта управления, вычислительного узла и програм много -уэла соединены с соответствую щими выходами и входс1ми узла управления, связанного с узлг1ми управления предыдущего и последующего блоков обработки, информационный выход узла управления соединен с узлом отображения. Известное устройство характеризу ется недостаточной надежностью рабо ты, так как выход из строя вычислительного блока приводит к прекращению координированного управления дорожным движением во всем районе. Целью изобретения является повышение надежности работы устройства. Это достигается тем, что в каждый блок обработки дополнительно введен многофункциональный узел связи, соединенный с многофункциональными узлами связи предыдущего и последующего блоков обработки, причем информационные входы многофункционального узла связи каждого блока обработки соединены с соответствующими входами устройства, а управляющий вход и выход - с соответствующими выходами и входом узла управления. На фиг. 1 изображена структурная схема описываемого устройства; на фиг. 2 - временной цикл работы блока связи. Устройство содержит вычислительный узел 1; пульт 2 управления; программный узел 3; узел 4 управления; многофункциональный узел 5 связи; узел 6 отобрс1жения информации. Синхронизация работы устройства центра с периферийныьш блока ш осуществляется при помощи частоты питающей сети, синфазирование - передачей специального синхроимпульса в начале каждого цикла многофункциональными узлами 5 связи параллельнд на все периферийные блоки. После получения периферийными блоками синхроимпульс происходит прием информации узлами связи от в.сех периферийных блоков. Ввод информ ации производится поразрядно последовательным кодом с проэеркой, на четкость за- время (см. фиг. 2). Принятая информация записывается в память узлов 5 связи формируется в 36-разрядное стандарт ное слово и подготавливается для передачи в вычислительный узел 1. П сигналу Прерывание, переданному из узла 5 связи в вычислительный узел 1, производится параллельный ввод информации в оперативное запоминающее устройство вычислительногс) узла 1 за время Далее производи ся передача управляющих команд из вычислительного узла 1 через узел 4 управления в память узлов 5 связи по параллельному входу. Ввод информации производится параллельно 36разрядным словом за время -t . Пере дача управляющих команд производитс одновременно на все г риферийные блоки за время t g последовательным кодом с проверкой на четность. На этом первый такт работы устройства заканчивается. Работа устройства во втором такт при обмене информацией со второй группой перекрестков аналогична работе в первом такте, однако запись информации от периферийных блоков производится в те же разряды памяти узлов 5 связи, что и в первом такте Дважды за цикл используются вентили записи информации от периферий ных блоков в память узлов 5 связи и вентили записи информации из памяти узлов 5 связи в память вычислительного узла 1. Таким образом, разделение цикла работы устройства на два такта и ос ществление поочередного обмена с двумя группами перекрестков приводи к сокращению объема оборудования уз лов 5 связи. При выходе из строя вычислительного узла 1 сигнал о его неисправности передается на пульт 2 управле ния и автоматически включает программный узел 3, в котором заложен один план координации управления дв жением транспорта. При использовании узлов 5 связи для Обмена информацией между вычислительными узлами различных блоков обработки с их входов снимается управление, связывающее узлы 5 связи ультами управления, а на параллельые входы подается информация от своего вычислительного узла через узел управления. Начало цикла вычислительного уза 1 сдвигается приблизительно на ОО мс относительно начала цикла вычислительного узла 1 соседнего блока обработки. Между временем tj и i вводится некоторый отрезок времени {см.фиг.2). В этом случае обмен информацией между двумя блоками обработки производится следующим образом. Информация, передаваемая за время -i/g вторь м блоком обработки, с выхода узла 5 связи поступает на вход узла 5 связи первого блока обработки и записывается в его память за время t . В следующий отрезок времени -t информация переписывается в оперативное запоминающее устройство вычислительного узла 1. Передача информации от вычислительного узла 1 первого блока обработки к вычислительному узлу-1 второго блока производится аналогично. Поскольку обмен информацией производится через линейные устройства, расстояние между устройствами может достигать 15-25 км. Формула изобретения Устройство для управления дорожным движением, состоящее изin блоков обработки, каждый из которих содержит вычислительный узел, программный узел, узел управления, пУльт управления и узел отображения, причем входы и выходы пульта управления, вычислительного узла и программного узла соединены с соответствующими выходаМи и входами узла управления, связанного с узлами управления предыдущего и последующего блоков обработки, информационный выход узла управления соединен с узлом отображения, о т личающеес я тем, что, с целью повышения надежности работы устройства, в каждый блок обработки дополнительно введен многофункциональный узел связи, соединенный с многофункциональными узлами связи предыдущего и последующего блоков обработки, причеминформационные входы многофункционального узла связи каждого блока обработки соединены с соответствующими входами устройства, а управляющий вход и выход - с соответствующими выходами и входом узла управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Обучающее устройство | 1984 |
|
SU1249566A1 |
| Устройство для координированного управления движением транспорта | 1983 |
|
SU1129643A1 |
| Система видеофиксации нарушений правил дорожного движения на перекрестке и способ ее работы | 2017 |
|
RU2668878C1 |
| Устройство для управления светофором | 1973 |
|
SU525369A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА МНОГОПОЛОСНЫХ ПЕРЕКРЕСТКАХ | 2011 |
|
RU2469410C1 |
| СИСТЕМА ИНТЕЛЛЕКТУАЛЬНОЙ ПОДДЕРЖКИ КОМАНДИРА КОРАБЛЯ | 1996 |
|
RU2133498C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНЫХ СРЕДСТВ НА ПЕРЕКРЕСТКЕ | 2014 |
|
RU2564469C1 |
| Устройство для сопряжения каналов передачи данных с ЭВМ | 1985 |
|
SU1226476A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СВЕТОФОРНЫМ ОБЪЕКТОМ С ЭВМ С НЕЙРОПРОГРАММАМИ | 1998 |
|
RU2151424C1 |
| Вычислительная система | 1977 |
|
SU692400A1 |
L Г
Cs
I
Irrj
J
S е-.
0
J
i
TI
/ та/гт
Л
isi.
2 mafm
