Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах программного управления электроприводом, например в координатных столах, графопостроителях, автоматах с программным управлением, промышленных роботах, системах управления гибких производственных модулей
Цель изобретения - расширение функциональных возможностей за счет обеспечения режима изменения в реальном масштабе времени величины
го управляемого делителя 3 частоты, а также значения управляющих координатных сигналов + и - - для коммутатора 10 и признак .запуска модуля на выполнение разгона после занесения данных в регистры модуля, счетчик 7 перемещения и первый формирователь 9.
Реверсивный счетчик 5 импульсов служит для суммирования импульсов разгона-торможения при разгоне и вычитании при торможении, причем группа его выходов определяет коэф



| название | год | авторы | номер документа |
|---|---|---|---|
| Программно-управляемый модуль | 1986 |
|
SU1327066A1 |
| Программно-управляемый модуль | 1986 |
|
SU1405028A1 |
| Программно-управляемый модуль | 1986 |
|
SU1403018A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1386964A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327060A1 |
| Устройство для разгона и торможения двигателя исполнительного механизма | 1986 |
|
SU1361507A1 |
| Устройство для разгона и торможения двигателя исполнительного механизма | 1980 |
|
SU960735A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1374182A1 |
| Устройство для программного управления | 1986 |
|
SU1397880A1 |
| Устройство для разгона и торможения двигателя исполнительного механизма | 1984 |
|
SU1182489A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах программного управления электроприводом. Цель изобретения - расширение функциональных возможностей за счет обеспечения режима изменения в реальном масштабе времени величины максимальной скорости движения электропривода во время отработки заданного перемещения. Модуль для программного управления электроприводом содержит генератор 1 импульсов, управляемые делители 2,3 частоты, формирователи 9,18, триггер 13, элементы И 11, 12, 19-22, элементы НЕ 23, ИЛИ 14, блоки 8,17 сравнения, усреднитель 24, реверсивный счетчик 5 импульсов, счетчик перемещения 7 и разгона 6, коммутатор 10, регистры задания 4, максимальной 15 и минимальной 16 скорости. Регистры, счетчик перемещения и формирователь 9 подключены к магистрали данных. Изобретение обеспечивает возможность неоднократного изменения во время отработки заданного перемещения величины максимальной скорости движения электропривода с автоматическим определением участка разгона и торможения. 3 ил.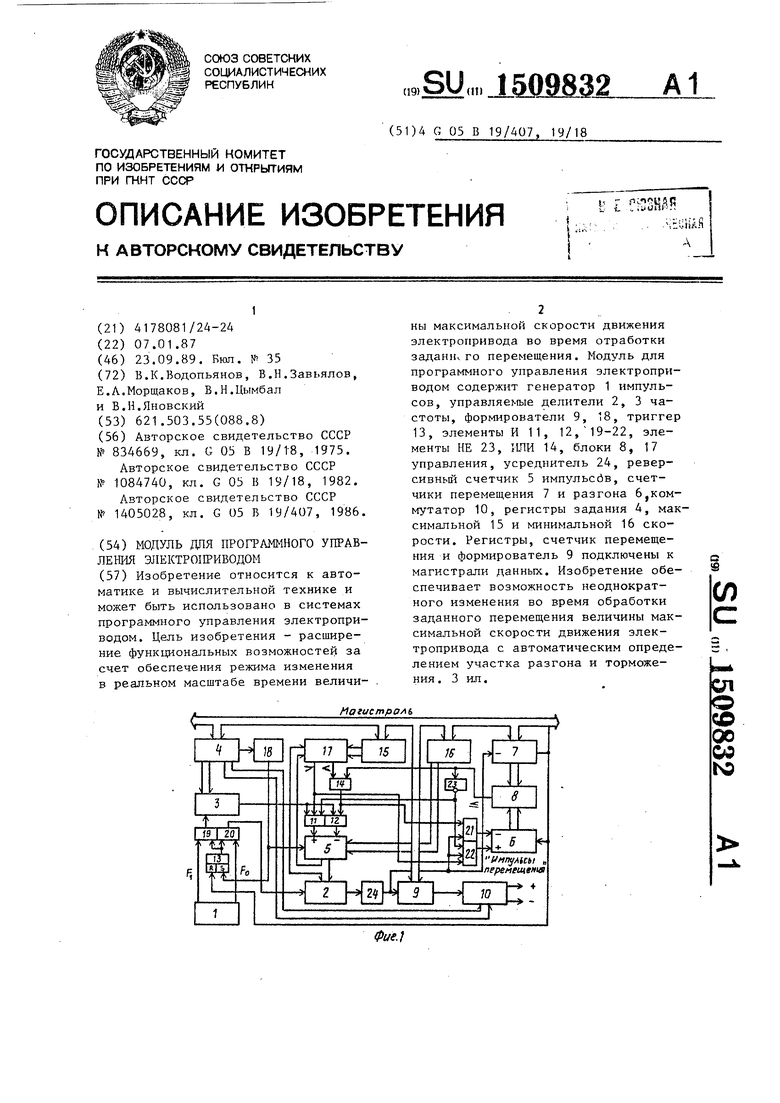
максимальной скорости движения элек- 15 Фициент деления первого управляемотропривода во время отработки заданного перемещения.
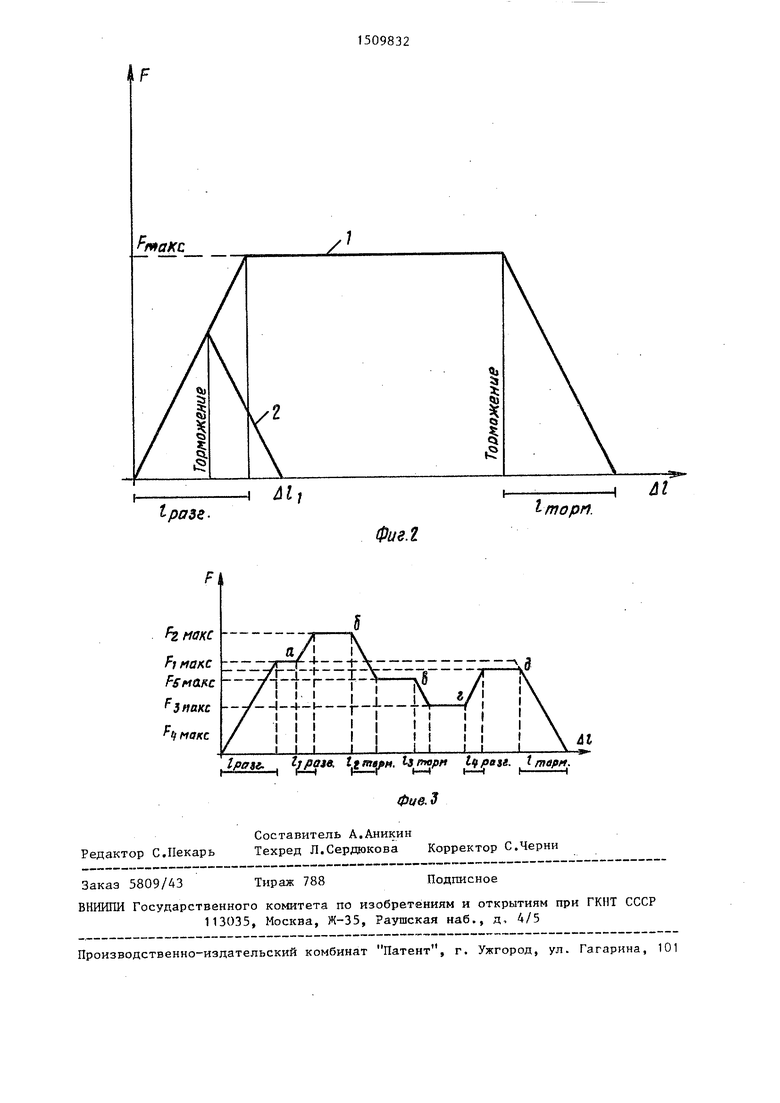
На фиг,1 представлена структурная схема устройства; на фиг,2 - график отработки заданного перемещения без изменения максимальной скорости движения электропривода во время отработки перемещения; на фиг.З - график отработки заданного перемещения с изменениями максимальной .скорости движения электропривода во время отработки перемещения.
Модуль (фиг,1) содерлсит генератор 1 импульсов, первьй 2 и второй 3 управляемые делители частоты, регистр А задания, реверсивный счетчик 5 импульсов, счетчик 6 разгона,счетчик 7 перемещения, первый блок 8 сравнения, первьш формирователь 9, коммутатор 10, первьш 11 и второй 12 элементы И, триггер 13, элемент РШИ 14, регистр 15 максимальной скорости, регистр 16 мршимальной скорости, второй блок 17 сравнения, второй формирователь 18, четвертый 19, третий 20, пятьш 21 и шестой 2.2 элементы И, элемент НЕ 23, усредни- . тель 24,
Генератор 1 импульсов вырабатывает постоянную частоту, причем его первый выход является выходом опорной частоты, которая преобразуется первым управляемым делителем 2 частоты в выходную частоту модуля, а второй выход генератора 1 импульсов яв.- ляется выходом частоты разгона-торможения, которая преобразуется вторым управляемым делителем 3 частоты в частоту счета реверсивного счетчика 5 импульсов,
Регистр 4 задания предназначен для хранения и вьщачи кода-величины ускорения разгона-торможения, определяющего коэффициент деления второ0
5
го делителя 2 частоты, а также подается на вторую группу входов второго блока 17 сравнения.
Счетчик 6 разгона осуществляет подсчет импульсов разгона при разгоне или при увеличении скорости - разгоне от движения с некоторой постоянной скорости f /лакс , с которой
велась отработка перемещения, до новой , причем Vj d , путем суммирования импульсов и вычитает при торможении или уменьшении скорости - притормаясивании, когда скорость изменяется до причем
0 ,,.c v,«,,.
Счетчик 7 перемещения вычитает каждый импульс выходной частоты из величины заданного перемещения, причем его нулевой выход свидетельству- 5 ет об окончании отработки заданного Перемеи1ения,
Первый блок 8 сравнения служит для определения момента начала торможения с текущей скорости до минимальной, а также фиксирования всего периода торможения. Момент начала торможения определяется равенством кодов на выходах счетчика 7 перемещения и реверсивного счетчика б разгона.
Первый формирователь 9 предназначен для формирования импульсов с заданными параметрами, например дли- тельностью.
Коммутатор 10 в зависимости от значений управляющих входов выдает импульсы выходной частоты на один из координатных выходов + или
Первый 11 и второй 12 элементы И разрешают счет реверсивного счетчика 5 импульсов, причем при разгоне или переходе к большей скорости движения электропривода открыт для прохождения импульсов на суммирующий
0
5
0
5
вход первый элемент И 11,а при тор можении или переходе к движению с более низкой скоростью открыт для прохождения имлульсов на вычитающий вход второй элемент И 12.
Триггер 13 обеспечивает запуск модуля в работу путем выработки разрешающего потенциала, поступающего на третий 20 и четвертый 19 элементы И и позволяющего импульсам с генератора 1 импульсов поступать на тактирующие входы первого 2 и второго 3 управляемых делителей частоты.
Элемент ИЛИ 14 обеспечивает объединение сигналов начала торможения с вьсхода первого блока 8 сравнения и сигнала с выхода Меньще второго блока 17 сравнения, свидетельствующего о необходимости уменьшить скорость электропривода до значения, поступившего в регистр 15 максимальной скорости. Регистр 15 максимальной скорости предназначен для хранения значения кода, соответствующего заданной величине максимальной скорости движения электропривода. В процессе отработки заданного перемещения значение максимальной скорости может меняться произвольное число раз.
Регистр 16 минимальной скорости хранит значение кода, соответствующего минимальной скорости перемещения, а также передает это значение на группу информационных входов реверсивного счетчика 5 импульсов.
Второй блок 17 сравнения обеспечивает определение периода разгона до требуемой максимальной скорости периода подразгона от заданной ранее максимальной скорости до большего значения максимальной скорости, которое занесено по магистрали данных в регистр 15 максималной скорости в процессе отработки заданного перемещения, а также определение периода подтормаживания от заданной ранее максимальной скорост до меньшего значения максимальной скорости, которое занесено в регист 15 максимальной скорости в процессе отработки заданного перемещения. Определение первых двух периодов осуществляется путем формирования сигнала на выходе Больше, а третьего периода - на выходе Меньше второго блока 17 сравнения.
5
0
5
0
5
0
5
0
5
Второй формирователь 18 обеспечивает выработку короткого импульса при установке в единицу сигнала на третьем выходе регистра 4 задания. Этим импульсом обеспечиваются установка триггера 13 в единичное состояние, а также перезапись значения кода, соответствующего минимальной скорости в реверсивный счетчик 5 импульсов.
Пятый 21 и шестой 22 элементы И обеспечивают прохождение импульсов с выхода усреднителя 24 на вычитаю- ший и суммирующий входы реверсивного счетчика 6 разгона, причем при разгоне или подразгоне импульсы проходят через шестой элемент И 22, а при торможении или подтормаживании - через пятый элемент И 21.
Инвертор 23 обеспечивает блоки- рованиь прохождения импульсов через первьй 11 и шестой 22 элементы И при осуществлении торможения.
Усреднитель 24 предназначен для выравнивания периода следования импульсов, поступающих с выхода первого управляемого делителя 2 частоты.
Модуль работает следующим образом.
Перед началом цикла отработки перемещения триггер 13 сброшен и импульсы с генератора 1 импульсов не ( поступают на первый 2 и второй 3 управляемые делители.
В начале цикла из магистрали данных в регистр 16 минимальной скорости заносится код величины минимальной скорости перемещения, в регистр 15 максимальной скорости - код величины максимальной скорости перемещения , в первый формирователь 9 - код длительности формируемых импульсов, в счетчик 7 перемещения - код величины требуемого перемещения, в регистр 4 задания (фиг.2) - код величины ускорения разгона-торможения, значения управляющих входов мультиплексора 10 в зависимости от требуемого направления перемещения, признак Работа, поступающий на третий выход регистра 4 задания и являющийся пусковым сигналом модуля.
Поданный признак Работа запускает второй формирователь 18, которым формируется короткий импульс, разрешающий перезапись кода минимальной скорости из регистра 16 ми-
1шмальной скорости в реверсивный счетчик 5 импульсов и устанавлива- Ю1Г1ий триггер 13 в единичное состояние. С выхода триггера 13 разрешающий потенциал подается на вторые входы третьего 20 и четвертого 19 элементов И и импульсы с генератора 1 импульсов, поступающие на первые входы третьего 20 и четвертого 19 элементов И, проходят на тактирующие входы первого 2 и.второго 3 управляемых делителей частоты. На вход первого управляемого делителя 2 частоты подается опорная частота Fg
(максимально возможная частота на .выходе модуля дляуправления электроприводом). На вход второго управляемого делителя 3 частоты поступает опорная частота F, (максимально возможная частота разгона электропривода) . Частота импульсов на выходах управляемых делителей частоты определяется коэффициентом деления - кодом, поступающим на их управляющие входы. Частота импульсов на выходе второго управляемого делителя 3 частоты определяется формулой
л f и
2Кгде п - код, соответствующий заданному ускорению разгона торможения, поступающий из регистра 4 задания на управляющие входы второго делителя 3 частоты; k - разрядность делителя. Импульсы с постоянной частотой F, соответствующей заданному ускорению, поступают на первью входы первого 11 и второго 12 элементов И. Значение кода на разрядных выходах реверсивного счетчика 5 импуль- (сов поступает на управляющие входы первого управляемого делителя 2 частоты и на вторую группу входов второго блока 17 сравнения, на первую группу входов которого поступает код из регистра 15 максимальной скорости.
Если значение кода, поступившего с реверсивного счетчика 5 импульсов меньше значения кода максимальной скорости, поступившего из регистра 15 максимальной скорости (именно эта ситуация имеет место при начале разгона), то второй блок 17 сравнения вырабатывает единичный
10
098328
сигнал на выходе Больше. Этот сигнал разрешает прохождение импульсов с выхода второго управляемого делителя 3 частоты, на суммируклций вход реверсивного счетчика 5 импульсов через первый элемент И 11, а также разрешает прохождение импульсов с выхода усреднителя 24 на суммирующий вход реверсивного счетчика 6 разгона через шестой элемент И 22. Импульсы проходят на суммирующие входы, если их прохождение не забло кировано подачей блокирующего потен« циала с выхода инвертора 23 на третьи входы первого 11 и шестого 22 элементов И..
Перезапись в реверсивный счетчик 5 импульсов значения кода минимальной скорости и поступление импульсов на тактируюпщй вход первого управляемого делителя 2 частоты приводят к образованию на выходе последнего импульсов частотой
15
20
F -
пропорциональной коду числа N на уп- равляющих входах этого делителя частоты, поступающему из реверсивного счетчика 5 импульсов. На выходе усреднителя 24 формируются импульсы
вых
0
5
0
5
где Nutrp коэффициент усреднения.
Импульсы запускают первый формирователь 9, которьш формирует импульсы требуемой длительности, и через коммутатор 10 поступают на выход модуля.
Поступающие на суммирующий вход импульсы с частотой F увеличивают код на выходах реверсивного счетчика 5 импульсов, а следовательно, и частоту F на выходе первого управляемого делителя 2 частоты. Одновременно реверсивный счетчик 6 разгона осуществляет подсчет (путем суммирования) импульсов с выхода усреднителя 24, вьщаваемых в период разгона.
Увеличение кода в реверсивном счетчике 5 импульсов, а следовательно, и возрастание частоты F на вько- де первого управляемого делителя 2 частоты, равно как и частоты на выходе модуля, осуществляется до тех
пор, пока не совпадут значение кода на выходе реверсивного счетчика 5 импульсов и значение кода максимальной скорости,хранимое в регистре 15 максимальной скорости, В этом случае на выходе Больше второго блока 17 сравнения формируется сигнал, блокирующий прохождение импульсов через первый 11 и шестой 22 элементы И, т.е. разгон электропривода закончен (фиг.2) и выполнен переход к движению с постоянной скоростью, определяемой кодом в регистре 15 максимальной скорости.
Каждый из формируемых усреднителем 24 импульсов поступает на вычитающий вход счетчика 7 перемещения, в результате чего содержимое счетчика 7 перемещения уменьшается на единицу по каждому из сформированных импульсов. Движение, с постоянной скоростью продолжается до тех пор, пока не сравняются коды на выходах счетчика 7 перемещения и реверсивного счетчика б разгона. В этом случае первый блок 8 сравнения вырабатывает разрешающий потенциал, поступление которого на элемент ИЛИ 14 обеспечивает прохождение импульсов частотой с выхода первого управляемого делителя 3 частоты через второй элемент И 12 на вычитающий вход реверсивного счетчика 5 импуль- сов, а также прохождение импульсов с выхода усреднителя 24 .через пятый элемент И 21 на вычитающий вход реверсивного счетчика 6 разгона. Началась отработка торможения электропривода до минимальной скорости. Код N на выходах реверсивного счетчи- .ка 6 импульсов уменьшается, следовательно, уменьшается частота F на выходе первого управляемого делителя 2 частоты, а значит, и частота на выходе модуля. Код N уменьшается до значения, равного значению, хранящемуся в регистре 16 минимальной скорости. Торможение осуществляется с таким же ускорением, как и разгон (т.е. 1торм раъг. (фиг.2). Торможение осуществляется до тех пор, пока не обнулится счетчик 7 1 перемещения , сигнал с нулевого выхода которого осуществляет сброс реверсивного счетчика 6 разгона, сброс триггера .13 и формирует сигнал Конец работы в магистраль данных об окончании отработ.ки перемещения.
0
5
0
5
0
5
0
Сброс триггера 13 приводит к блокировке прохождения импу;тьсов частотой FP и F, с первого и второго выходов генератора 1 импульсов через третий 20 и четвертый 19 элементы И. На этом цикл разгон-движение с постоянной скоростью - торможением (фиг.2, кривая 1) заканчивается.
Модуль обеспечивает отработку перемещения и без .выхода на максимальную скорость (фиг.2, кривая 2). В этом случае разгон выполняется аналогично описанному, но когда значение кода Б счетчике 7 перемещения становится равным или меньше значению числа импульсов разгона, находящемуся в реверсивном счетчике 6 разгона, первый блок 8 сравнения через инвертор 23 блокирует продолжение разгона, т.е. поступление импульсов на. суммирующие входы реверсивных счетчиков 3 и 6, и через элемент ИЛИ 14 запускает прохождение импульсов на вычитающие входы реверсивных счетчиков 5 и 6, т.е. переводит модуль в режим отработки торможения. Окончание цикла разгон - торможение (фиг.2, кривая 2) производится аналогично окончанию цикла разгон - движение с постоянной скоростью - торможением.
Если в процессе отработки переме- 1цения требуется изменить значение мак- максимальной скорости (например, точки а , 8 , S , 2 , на фиг.З) , модуль обеспечивает автоматический под- разгон до новой скорости (MOtKC
VMOKO где - предьщущее значение максимальной скорости, точка с( ) или подтормаживание до новой
5
0
5
скорости V
мех КС
(V
X ТТ
макс макс
точка В). Поступление новогр значения максимальной скорости из магистрали данных в регистр 15 максимальной скорости в период торможения цикла отработки перемещения не влияет на работу модуля и модуль выполняет торможение электропривода по описанному ранее алгоритму. Если новое значение максимальной скорости поступает в период разгона, то модуль отрабатывает разгон до нового значения максимальной скорости, перемещение с постоянной скоростью, торможение по описанным алгоритмам работы.
Если новое зна чение максимальной скорости заносится в регистр. 15 максимальной скорости в период отработки движения с постояннсЗй скоростью, то в зависимости от величины новой максимальной скорости модуль осуще- ствлят переход к новой скорости путем подразгона или подтормаживания, Движение с постоянной скоростью характеризуется тем, что в реверсивном счетчике 5 импульсов хранится код величины старой максимальной скорости, а в реверсивном счетчике 6 разгона - код числа импульсов, выданных модулем при выполнении разгона, заблокировано прохождение импульсов на суммирующие и вычитающие входы разрешения суммирования и вычитания реверсивного счетчика 5 импульсов и реверсивного счетчика 6 разгона, так как на выходах Больше и Меньше второго блока 17 сравнения и выходе первого блока 18 сравнения присутствуют низкие логические уровни сигналов.
Если повое значение максимальной скорости, занесенное в регистр 15 максимальной скорости, больше старого значения, т.е. .c . амакс I lMQ o точка а на фиг.4), то второй блок 17 сравнения на выходе Больше формирует потенциал высокого уровня, который разрешает прохождение импульсов частоты Fj, с выхода второго управляемого делителя 3 частоты через первый элемент И 11 на суммируюший вход реверсивного счетчика 5 импульсов, а также прохождение с выхода усреднителя 24 через шестой элемент И 22 на суммирующий вход реверсивного счетчика 6 разгона. Значение кода в реверсивном счетчике 5 импульсов, а следовательно, и частота на выходе модуля увеличиваются. Одновременно увеличивается значение кода числа импульсов разгона в реверсивном счетчике 6 разгона. Увеличение кодов, а значит, и частоты на выходе модуля продолжается до тех пор, пока код на выходе реверсивного счетчика 5 импульсов не станет равным коду, зане сенному в регистр 15 максимальной скорости, В этом случае на обоих выходах второго блока 17 сравнения формируются низкие потенциалы, бло- кируюш 1е прохождение импульсов в реверсивные счетчики 5 и 6, и модуль начинает отрабатывать перемещение
с новой постоянной скоростью V ддокс
(F
1 «акс
Если новое значение максимальной скорости, занесенное в регистр 15. максимальной скорости, меньше старо- го значения, т.е. УД„ V,,
(соответственно Е,,макс « . « точка 5 на фиг.4), то второй блок 17 сравнения на выходе Меньше формирует потен1Ц1ал высокого уровня, коiторый через элемент ИЛИ 14 разрешает прохождение импульсов с выхода второго управляемого делителя 3 частоты через второй элемент И 12 на вычитающий вход реверсивного счетчика
5 импульсов и прохождение импульсов с выхода усреднителя 24 через пятый элемент И 21 на вычитаюищй вход реверсивного счетчика 6 разгона. Значение кода в реверсивном счетчике
5 импульсов, а следовательно, .и частота на выходе модуля начинают уменьшаться . Одновременно уменьшается значение кода числа импульсов разгона в реверсивном счетчике 6 разгона, так как производится подтормалси- вание до более низкой скорости. Уменьшение кодов, а значит, к частоты на выходе модуля продолжается до тех пор, пока код на выходе реверсивного счетчика 5 импульсов не ста- ;нет равным значению кода, занесенному в регистр 15 максимальной скоро- . сти, В этом случае на обоих выходах второго блока 17 сравнения формируются низкие потенциалы, блокирующие прохождение импульсов в реверсивные счетчики 5 и 6, и модуль начинает отрабатывать перемещение с новой постоянной скоростью Vддo,|(, (F, g|(,). В точках Ь и г (фиг.1) модуль работает аналогично рассмотренным точкам а и & в части изменения значения максимальных скоростей.
Таким образом введение новых элементов, блоков с их связями расширяет функциональные возможности модуля для программного управления электроприводом за счет обеспечения режима изменения в реальном масштабе времени
величины максимальной скорости движения электропривода во время отработки заданного перемещения, что обеспечивает также возможность работы модуля с интерполирующим устройством, путем увеличения или уменьшения скорости движения электропривода во время отработки перемещения по данным, передаваемым интерполирующим устройстпом по магистрали данных в регистр максимальной скорости.
Формула изобретения
Модуль для программного управления электроприводом, содержащий генератор импульсов, триггер, первый и второй управляемые делители частоты, регистр задания, первый и второй формирователи, первый, второй и третий элементы И, элемент ИЛИ, реверсивный счетчик импульсов, регистр минимальной скорости, счетчик перемещения, первый блок сравнения,счет- Iчик разгона, коммутатор, тактовый вход которого подключен к выходу первого формирователя, группа управляющих входов коммутатора соединена с первой группой выходов регистра задания, вторая группа выходов которого соединена с группой управляющих входов второго управляемого делителя частоты, третий выход регистра задания соединен с входом второго формирователя, а группа вхо- дов регистра задания подключена к магистрали данных, при этом первый выход генератора импульсов подключен к первому входу третьего элемента И, второй вход которого соединен с выходом триггера, а выход - с тактовым входом первого управляемого делителя частоты, группа управляющих выходов которого соединена с группой выходов реверсивного счетчика импульсов, группа информационных входов реверсивного счетчика импульсов подключена к группе выходов регистра минимальной скорости, а управляюЕцнй вход - к выходу второго формирователя и входу установки в 1 триггера, выходы первого и второго элементов И подключены к суммирующему.и вычитающему входу реверсивного счетчика импульсов соответственно, первые входы первого и второго элементов И объединены и подключены к выходу второго управляемого делителя частоты, второй вход второго элемента И соединен с выходом элемента ИЛИ, первый вход которого подключен к выходу первого блока сравнения, первая группа входов первого блока сравнения соединена с группой выходов счетчика перемещения, а вторая. - с
группой выходов счетчика разгона,при этом нулевой выход счетчика перемещения подключен к входам установ- ки в О счетчика разгона триггера и к шине Конец работы, а группы информагщонных входов регистра минимальной скорости и счетчика перемещения подключены к магистрали данных, отличающийся тем, что, с целью расширения функциональных возможностей за счет обеспечения режима изменения в реальном масштабе времени величины максимальной
скорости движения электропривода во время отработки заданного перемещения, счетчик разгона выполнен в виде реверсивного, а также в него введены четвертый, пятый и шестой элементы И, элемент НЕ, усреднитель, второй блок сравнения и регистр максимальной скорости, группа выходов которого соединена с первой группой входов второго блока сравнения, вторая группа входов второго блока сравнения подключена к выхрдам реверсивного счетчика импульсов, выход Больше второго блока сравнения соединен с вторым входом первого первым входом шестого элементов И, а выход Меньше - с вторым входом элемента ШШ, при этом выход первого управляемого делителя частоты подключен к входу усреднителя, вьпсод которого соединен с тактовым входом первого формирователя, вычитающим входом счетчика перемещения, первым входом пятого и вторым входом .шестого элементов И, второй вход пятого элемента И подключен к выходу элемента ИЛИ, вход элемента НЕ - к выходу первого блока сравнения, а выход элемента НЕ соединен с третьими входами- первого и шестого элементов И, выходы пятого и шестого элементов И соединены с вычитающим и суммирующим входами счетчика разгона соответственно, второй выход генератора импульсов подключен к первому входу четвертого . элемента И, второй вход которого соединен с выходом триггера, а выход - с тактовым входом второго управляемого делителя частоты, группа управляющих входов первого формгфов ателя и группа информационных входов регистра максимальной скорости подключены к магистрали данных.
ntaffc
/
passA &l
jflote. P it pa Si. map.
фц&. IS
Составитель А.Аникин Редактор С.Пекарь Техред Л.Сердюкова Корректор С.Черни
Заказ 5809/43
Тираж 788
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д, 4/5
5
imopn.
&l
Фиг.
Подписное
| Устройство для автоматического раз-гОНА и ТОРМОжЕНия дВигАТЕля CTAHKA СпРОгРАММНыМ упРАВлЕНиЕМ | 1975 |
|
SU834669A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Программно-управляемый модуль | 1986 |
|
SU1405028A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
