Изобретение относится к способам перемещения лесоматериалов на заданные длины сортиментов и может быть использовано в раскряжевочных установках.
Известен способ отмера длин сортиментов при раскряжевке хлыстов, включающий задание позиций их останова в функции числа импульсов, перемещение хлыстов на большой скорости со сравнением заданного и пройденного путей по числам импульсов, с выдачей команд при сравнении на перевод хлыстов с большой на пониженную скорость, а затем отключение привода.
Этот способ реализуется устройством для отмера длин сортиментов при раскряжевке хлыстов, включающим механизм подачи с приводом и систему управления с коммутатором, схемами сравнения, блоком задания позиций останова, связанный с входом предварительной установки счетчика, блоком управления приводом подачи, постоянным запоминающим блоком, дополнительной схемой сравнения, дешифратором нуля, двумя счетными триггерами допуска и нуля, блоком определения направления движения, блоком определения нулевой скорости и блоком логики с триггерами большой и пониженных скоростей и триггер торможения.
Недостатками известного способа и реализующего его устройства является недостаточные производительность и точность отмера длин сортиментов.
Также известен способ отмера длин сортиментов при раскряжевке хлыстов, включающий их перемещение приводами подачи от режущего органа на повышенной скорости с отсчетом пройденного пути до начала торможения в функции времени с торможением хлыстов приводом и упором, перевод приводов подачи на пониженные скорости прямого и обратного направлений, возврат и остановку упора в исходное положение и отключение приводов.
Этот способ реализуется устройством для отмера длин сортиментов при раскряжевке хлыстов, включающим механизм подачи с тяговым органом, траверсами, ведущей звездочкой и соединенным с ней приводом, центрирующий ролик, кинематически соединенный с ведущей звездочкой, механический тормоз, приемный стол с шарнирно закрепленной на стойках поворотной в поперечной вертикальной плоскости рамой, поворотные в поперечной вертикальной плоскости упоры, выполненные в виде рычагов второго рода, гидросистему с распределителями и гидроцилиндрами и систему управления с задатчиком позиций останова лесоматериалов, командоаппаратами заказа каждой заданной позиции, блоком пуска и торможения привода механизма подачи, блоком предварительного отключения привода перед выставленным упором в функции времени, датчик конечного останова и командоаппарат включения привода возврата упоров.
Недостатками известных способа и реализующего его устройства является пониженная производительность вследствие невозможности надежного использования здесь автоматизированного режима подачи и точного останова хлыстов, что приводит к дополнительному возникновению разброса тормозных путей и уменьшению средней скорости подачи. Отсутствие возможности надежного осуществления автоматизированного режима вызвано и тем, что здесь используются максимальные силы противодействия упоров хлыстам в выставленных положениях. Это в современных условиях переработки хлыстов, преимущественно пониженных масс, приводит к невозможности надежного отклонения выставленного упора при воздействии на него хлыстов, а следовательно, надежно не будет происходить включение датчика конечного торможения и останова, особенно при использовании пониженных скоростей.
Уменьшение производительности здесь происходит и вследствие невозможности, обеспечения одновременной подачи нескольких хлыстов, совмещения операций, возможность использования автоматизированного режима применительно лишь к ограниченному количеству сортиментов, осуществляемого здесь только упорами.
Кроме того, здесь не обеспечивается заданная точность останова упорами применительно ко всем длинам сортимента. При этом даже в случае применения упоров точность останова не обеспечивается потому, что при перемещении хлыстов на значительные расстояния лесоматериалов в функции времени накапливаются дополнительные ошибки в выдаче сигнала на торможение, что также вызывает нестабильность взаимодействий хлыстов с упорами, приводящих к отключению привода перед упорами или отсковом от них хлыстов.
В определенной степени неточность останова возникает и в случае отсутствия возможности возврата неправильно отпиленных сортиментов.
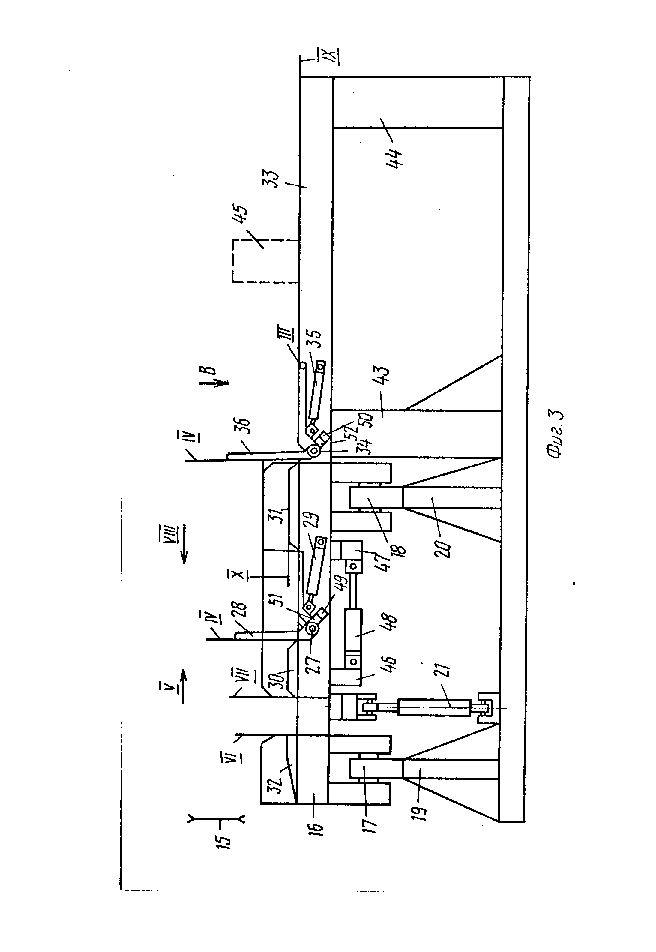
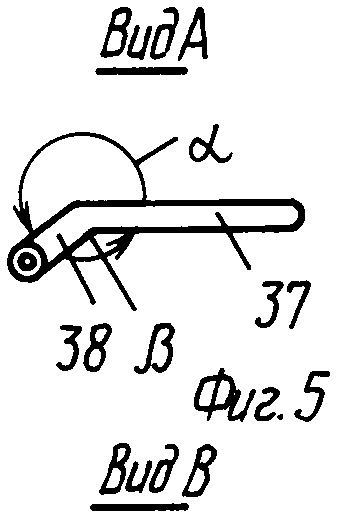
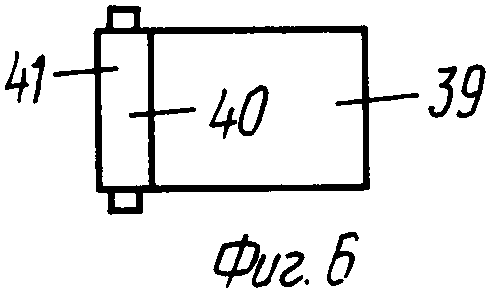
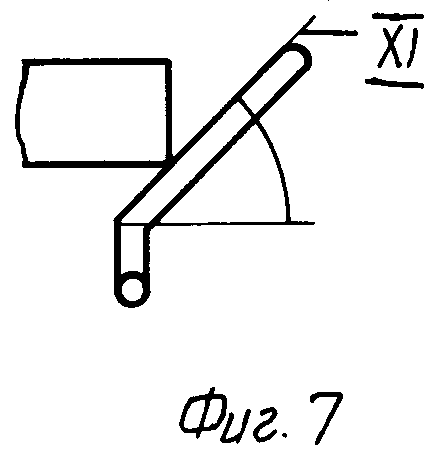
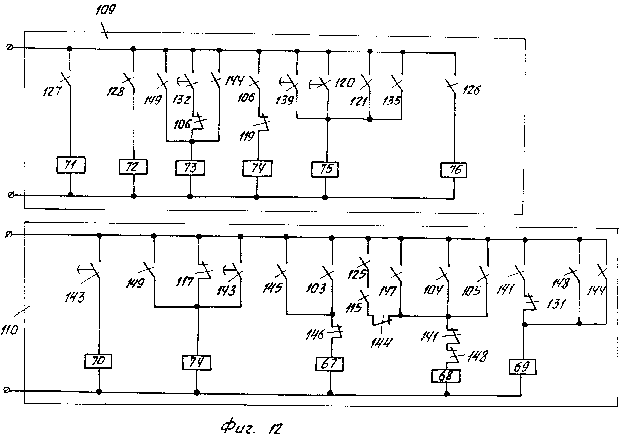
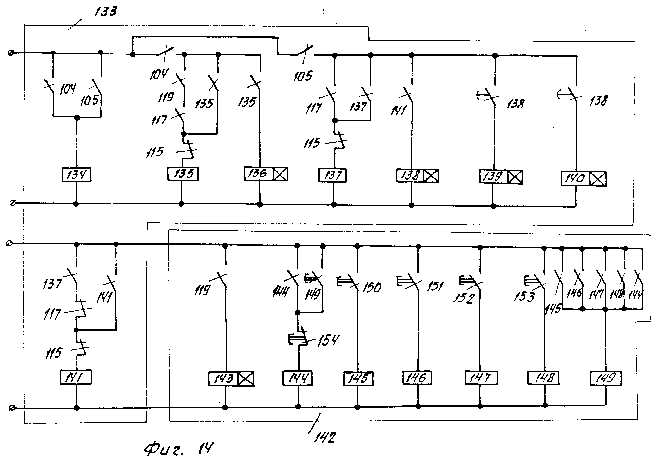
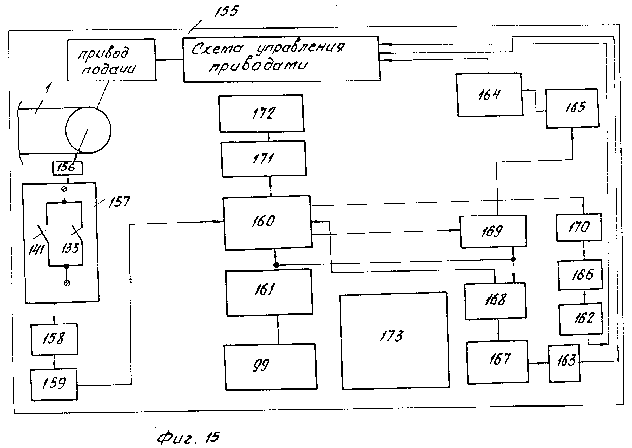
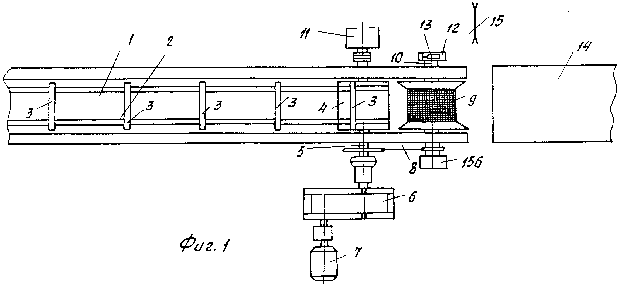
На фиг. 1 и показан вид сверху многоскоростного механизма подачи с уменьшенной инерционностью и повышенным сцеплением с лесоматериалами; на фиг. 2 - то же, вид сбоку; на фиг. 3 - приемный стол, вид сбоку; на фиг. 4 - то же, вид сверху; на фиг. 5 - вид по стрелке А на фиг. 4; на фиг. 6 - вид по стрелке В на фиг. 3; на фиг. 7 - схема взаимодействия движущегося лесоматериала с наклонной плоскостью отклоненного ограниченно-силового упора; на фиг. 8 и 9 - гидросхемы управления гидроцилиндрами и гидромотором; на фиг. 10 - схема подключения электродвигателя привода подачи; на фиг. 11-14 - электросхемы управления устройством; на фиг. 15 - схема безупорного позиционирования с датчиком и счетчиком импульсом с началом отсчета от выставленных упоров.
Устройство для отмера длин сортиментов при раскряжевке хлыстов включает в себя механизм подачи, содержащий цепной конвейер 1 с тяговым органом 2, траверсами 3, ведущей звездочкой (туером) 4, тихоходным валом 5 и соединенный с ним через основную кинематическую цепь с редуктором 6 электродвигатель 7. Тихоходный вал 5 ведущей звездочки 4 дополнительной кинематической цепью 8, здесь выполненной ускоряющей, связан с центрирующим роликом 9. Поэтому звездочка 4, соединенная кинематической цепью с увеличенным передаточным отношением, является тихоходной, а ролик 9 с валом 10 являются быстроходными, т. е. обеспечивающими линейную скорость, например, в 2-3 раза большую, чем скорость ведущей звездочки 4.
Центрирующий ролик 9 может быть выполнен с большим или меньшим радиусом, чем радиус ведущей звездочки 4, но при этом отношение радиуса (Rзв) ведущей звездочки к передаточному отношению его основной кинематической цепи с редуктором 6 до двигателя (iзв-д) выполнено меньшим, чем отношение радиуса центрирующего ролика 9 (Rц.р) к передаточному отношению кинематической цепи до двигателя 7 с редуктором 6 и дополнительной ускоряющей цепной передачей 8 (iц.р-д). Т. е.
 <
<  Вследствие этих отношений при одной и той же угловой частоте вращения вала двигателя 7 обеспечиваются различные линейные скорости на центрирующем ролике 9 и ведущей звездочке 4 даже при использовании односкоростного двигателя 7. При этом центрирующий ролик 9 здесь выполнен с шипами и установлен на уровне I выше уровня II траверс 3 цепного конвейера. Однако вследствие использования как позиционирования лесоматериалов по силовым упорам, так и безупорного позиционирования, механизм подачи должен обеспечивать многоскоростной режим подачи.
Вследствие этих отношений при одной и той же угловой частоте вращения вала двигателя 7 обеспечиваются различные линейные скорости на центрирующем ролике 9 и ведущей звездочке 4 даже при использовании односкоростного двигателя 7. При этом центрирующий ролик 9 здесь выполнен с шипами и установлен на уровне I выше уровня II траверс 3 цепного конвейера. Однако вследствие использования как позиционирования лесоматериалов по силовым упорам, так и безупорного позиционирования, механизм подачи должен обеспечивать многоскоростной режим подачи.
Это обеспечивается, например, при использовании двухскоростного двигателя 7, причем в составе механизма подачи с тяговыми органами с различными линейными скоростями он может иметь значительно меньшую мощность, чем в составе существующей раскряжевочной установки ЛО-15А (С), например, вместо 18-22 кВт лишь ≈11 кВт. При этом двигатели этой мощности уже обеспечивают необходимое число включений в 1 ч (600-800 и более).
Использование двухскоростного двигателя, например, с глубиной регулирования ≈4: 1 позволяет обеспечить трехскоростной режим подачи. В свою очередь, многоскоростной режим в рассматриваемом механизме подачи может быть также обеспечен при использовании односкоростного двигателя 7 привода ведущей звездочки 4 и соединенного с ним гидромотора 11. Последний здесь установлен на тихоходном валу 5 и поэтому позволяет в 2-3 раза уменьшить расход масла в гидросистеме по сравнению, например, с его установкой на быстроходном валу. При этом гидромотор 11 может дополнительно обеспечить для многоскоростного режима подачи пиломатериалов 2-3 или более пониженных скоростей. Для уменьшения влияния свободных ходов в цепной передаче 8 на быстроходном валу 10 может быть установлен механический тормоз 12 с приводом от гидроцилиндра 13. Кроме того, позицией 14 показан приемный стол и пильный станок. Приемный стол 14 имеет раму 16, с помощью шариков 17 и 18 закрепленную на стойках 19, 20, выполненную поворотной в поперечной вертикальной плоскости под действием гидроцилиндра 21. При этом поворотная рама 16 снабжена направляющими 22 и 23, в которых подвижно 24, 25 закреплена дополнительная рама 26. На дополнительной раме 26 с помощью шарнира 27 закреплен поворотный в продольной вертикальной плоскости упор 28 под действием гидроцилиндра 29 и установлены подвижные направляющие V-образные траверсы 30 и 31, между которыми закреплен шарнир 27 первого поворотного упора. Кроме того, на поворотной раме закреплена неподвижная траверса 32, выполненная V-образной, установленная у переднего торца приемного стола. Последовательно с поворотной рамой 16 установлен горизонтальный лоток 33, на котором закреплен шарнир 34 второго поворотного от гидроцилиндра 35 упора 36. При этом оба упора 28 и 36 выполнены в виде криволинейных рычагов второго рода, содержащие каждый две грани 37, 38 и верхние, средние и нижние ребра 39, 40, 41, которые гидроцилиндрами 29 и 35 могут перемещаться из горизонтальных положений III в вертикальное положение IY.
При этом верхние и нижние грани 37 и 38 установлены под внешними α и внутренними β тупыми углами, причем внешние тупые углы α каждого из упоров 28 и 36 в выставленных положениях IV направлены навстречу движения лесоматериалов 1. В свою очередь, верхние ребра 39 первого упора 28 выполнены V-образными и снабжены шипами 42.
Горизонтальный лоток 33 установлен на стойках 43, 44, при этом шарнир 18 поворотной рамы 16 выполнен взаимодействующим со стойкой 43 горизонтального лотка 33, которая разгружает шарниры 17 и 18. На горизонтальном лотке 33 также может быть установлен стационарный упор 45 (показан пунктиром). Дополнительная рама 26 соединена с поворотной неподвижной рамой 16 посредством стоек 46, 47 и гидроцилиндра 48, которая совместно с подвижными траверсами 30 и 31 может перемещаться из исходного положения VI в крайнее положение VII. При этом, если, например, упор 28 в исходном положении VI подвижной рамы установлен, например, на расстоянии 1,6 м от пильного диска 15, то при перемещении гидроцилиндром 48 на максимальное расстояние ≈ 0,4 м, этот упор перемещается в позицию 2,0 м от пильного диска 15.
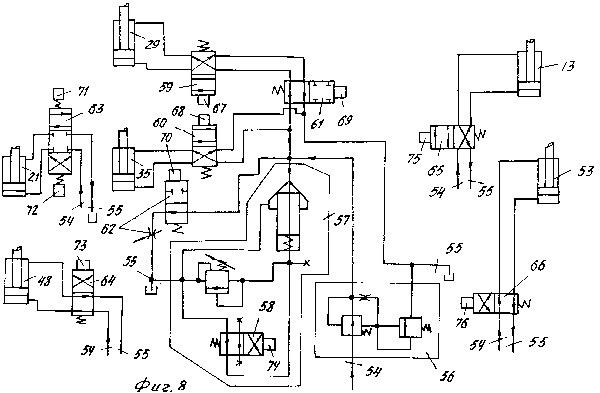
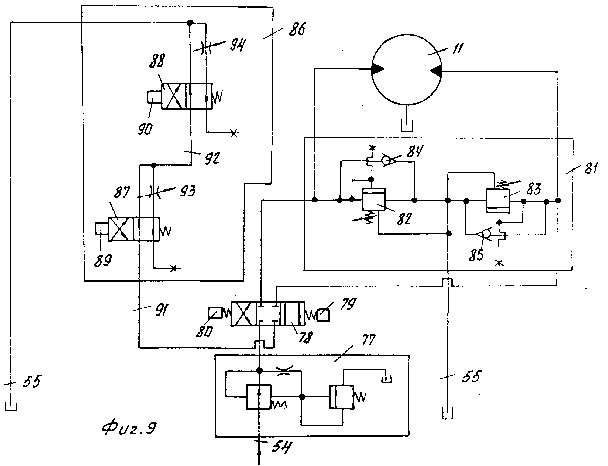
Каждый из поворотных упоров снабжены датчиками 49 и 50 их вертикального положения, включаемые воздействующими на них элементами 51 и 52. Гидросистема обеспечивает управление гидроцилиндрами 13, 21, 29, 35, 48, функциональные назначения которых были приведены выше и гидромотором 11. Кроме того, здесь используется гидроцилиндр 53 надвигания пильного диска 15 на лесоматериал (сам пильный станок не показан). Кроме того, позициями 54, 55 показаны напорная и сливная магистрали, редукционный клапан 56 и узел 57 изменения давления в гидроцилиндрах 29, 35 с предохранительным (переливным) клапаном с дистанционным управлением посредством распределителя 58. В свою очередь, узел амортизации упоров при их отклонении лесоматериалами содержит распределители 59, 60 61, распределитель 62 с дросселем узла амортизации упоров. Кроме того, система управления содержит распределители 63, 64, 65, 66 управления гидроцилиндрами 21, 48, 13, 53. Указанные распределители имеют магниты 67-76.
Гидросхема управления гидромотором 11 содержит редукционный клапан 77, реверсивный распределитель 78 гидромотора 11 с магнитами 79, 80, узел 81 защиты гидромотора с предохранительными клапанами 82, 83 и обратными клапанами 84, 85, узел 86 регулирования скорости гидромотора 11, например распределители 87, 88 с регулированием хода золотников с магнитами 89, 90 или не показанные, например, регуляторы потока. При использовании распределителей 87 и 88 трубопровод 91 может соединяться с трубопроводом 92 напрямую или через дроссель 93. В свою очередь, магистраль 92 соединяется со сливной магистралью 55 напрямую или через второй дроссель 94. Причем дроссель 93 уменьшает расход масла в гидромоторе 11 и его скорость уменьшается до пониженной, например, 0,7-0,8 м/с, а второй дроссель 94 еще более ограничивает расход масла и при этом гидромотор 11 начинает работать с еще меньшим расходом, т. е. уже на малой скорости, например, 0,3-0,4 м/с.
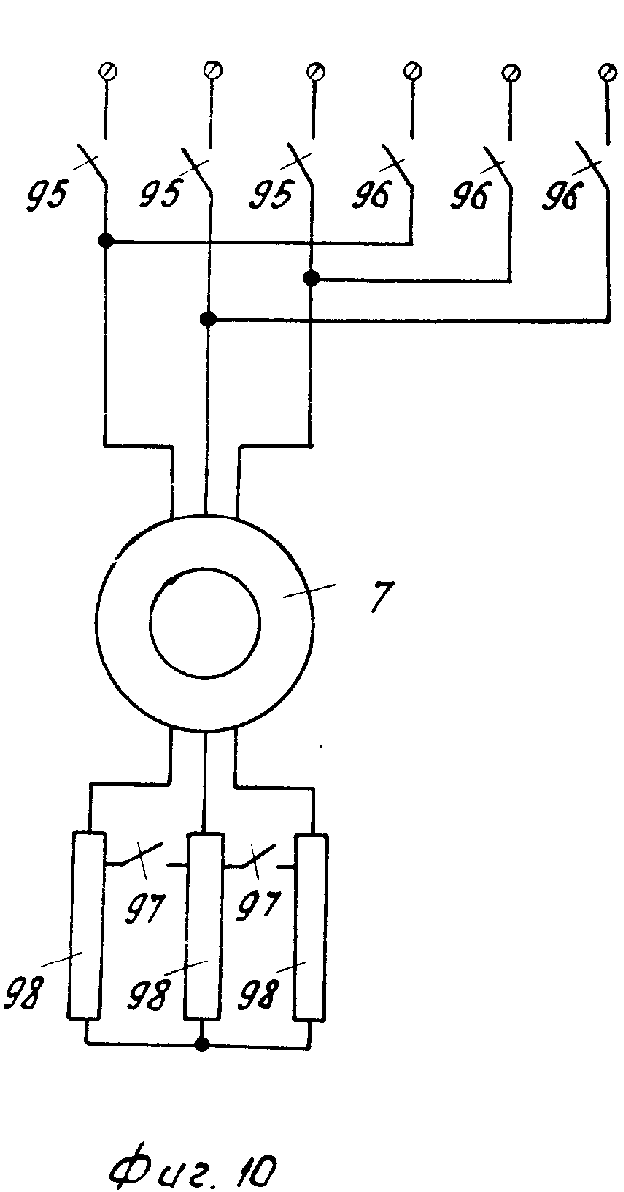
На фиг. 10 односкоростной электродвигатель 7 применительно к варианту многоскоростного электропривода с гидромотором 11 подключен к сети пускателями 95, 96 (вперед, назад), а в его роторной цепи используется пускатель 97, шунтирующий сопротивления 98.
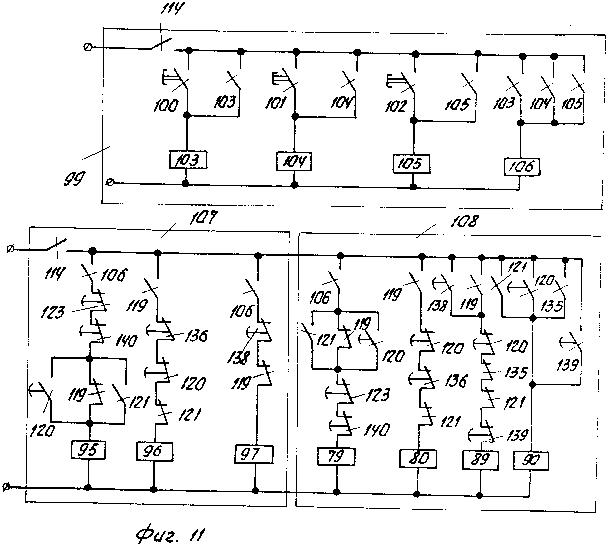
Схема управления содержит задатчик 99 позиций останова с кнопками 100, 101, 102 и реле 103, 104, 105, 106, блок 107 управления электродвигателем, блок 108 управления гидромотором 11 и узлом 86 регулирования его скорости. Кроме того, схема управления содержит блок 109 управления гидроцилиндрами 13, 21, 48, 53 механического тормоза, качания поворотной рамы 16, привода возвратно-поступательных перемещений подвижной рамы 26, привода перемещений пильного диска 15, а также блок 10 управления гидроцилиндрами 29 и 35 поворотных упоров 28, 36.
В свою очередь, система управления снабжена блоком 111 отмера длин сортиментов упорами с поиском заданной позиции останова, содержащим контакты 112, 113 и реле 114, 115 исходного и крайнего положения пильного диска, реле 116, 117, 118, 119, реле 120, реле 121, 122, реле времени 123, блоком 124 возврата подвижной рамы в исходное положение при сброске сортиментов. Кроме того, часть блока 111 и блок 113 выполняют функцию общего блока предварительного отмера длин сортиментов упорами и окончательного безупорного отмера с началом отсчета пройденного пути от выставленных упоров по команде датчиков 49, 50. При этом общий блок снабжен схемой определения расстояний перемещений лесоматериалов от упоров в функции времени, содержащей реле 134, 135, реле времени 136, реле 137, реле времени 138, 139, 140 и реле 141. В свою очередь, блок 142 свободной и принудительной установки поворотных упоров в различные положения содержит реле 143 времени, реле 144-149 и кнопочные выключатели 150-154. Кроме того, блок предварительного отмера упорами и окончательного безупречного отмера с началом отсчета пройденного пути от выставленных упоров снабжен блок-схемой 155 определения расстояний перемещений лесоматериалов от упоров в функции числа импульсов датчика 156, соединенного с центрирующим роликом 9. Эта схема содержит схему разрешения начала отсчета импульсов датчика 156, содержащую контакты реле 135, 141, соединенные с пороговыми элементами датчиков 49 и 50, входной усилитель 158, формирователь 159 импульсов, счетчик 160 импульсов, шифратор 161, электронные ключи 162, 163, 164 каналов управления приводами, выходные усилители 165, 166, 167, триггеры 168, 169, 170, дешифратор 171, индикатор 172, блок 173 питания.
Кроме того, при сжатом состоянии гидроцилиндра 48 подвижная рама находится при его разжатом состоянии, она находится в крайнем заднем положении VII. Обратное направление перемещения лесоматериалов показано положением VIII. Горизонтальный лоток 33 установлен на уровне IX ниже уровня X направляющих траверс 30 и 31, а поворотная рама 16 по ширине выполнена большей, чем горизонтальный лоток. В свою очередь, лесоматериалы перемещение на пониженных скоростях заканчивают на наклонной плоскости выставленного упора, т. е. когда он находится в положении ХI.
Устройство, реализующее предлагаемый способ, работает следующим образом.
Перед началом подачи механический тормоз 12 разомкнут, так как в блоке 109 магнит 75 отключен. Гидроцилиндр 48 находится в сжатом состоянии, так как магнит 73 включен реле времени 132 и поэтому подвижная рама 26 находится в крайнем переднем положении VI.
Рама 16 находится в горизонтальном положении, так как магниты 71, 72 отключены. Пильный диск 15 находится в исходном положении (показан только гидроцилиндр 53 его качания), так как магнит 75 отключен. В узле 57 предохранительный клапан может одновременно являться переливным, если он настроен на меньшее давление, чем давление, получаемое после редукционного клапана 56. Поэтому при включенном магните 74 предохранительный клапан 57 с разгрузочным золотником 58 может быть открытым при максимальных давлениях в поршневых полостях гидроцилиндров 29 и 35.
При этом со стороны упоров 28 и 36, если они находятся в выставленном положении, обеспечивается ограниченная сила противодействия перемещающимся лесоматериалам, например, не более 20000-25000 Н. Однако в начале работы упоры 28, 36 находятся в исходном (горизонтальном) положении III, так как магниты 67 и 68 отключены. Кроме того, перед подачей лесоматериала на заданные длины сортиментов передняя наиболее тяжелая часть хлыста находится в поднятом роликом 9 положении I выше уровня II траверс и с ним сцепляется ≈2/3 mx (массы хлыста). При этом с гладкими траверсами 3 взаимодействует лишь ≈1/3mx, т. е. практически только его вершинная часть. Так как коэффициент сцепления лесоматериала с роликом 9 с шипами составляет ≈ 1,2-1,5, а коэффициент его сцепления с гладкими траверсами составляет в максимуме лишь 0,3, то сила тяги лесоматериала со стороны ролика 9 превышает силу сопротивления их перемещению со стороны гладких траверс ≈ в 8-10 раз.
Предлагаемое устройство может работать по нескольким вариантам.
В а р и а н т 1. Осуществляется подача лесоматериала на длину сортимента с малыми допусками с использованием позиционирования только по силовому упору, установленному, например, в позиции, соответствующей длине сортимента ≈2,0 м.
Оператор в задатчике 99 включает реле 103, 106, 116 и магнит 67. Поэтому упор 28 выставляется из горизонтального положения III в вертикальное положение IV и в блоке III срабатывает реле 117 от порогового элемента 49 соответствующего датчика упора 28. Реле 117 отключает магнит 74, давление в штоковой полости гидроцилиндров 29 и 35 становится минимальным. Так как упоры 28 и 36 выполнены криволинейными, поэтому их центры тяжести в положениях IV смещены за оси вращения 27, 34 упоров и при минимальном давлении в поршневых полостях гидроцилиндров 29, 35 они удерживаются в вертикальных положениях IV в основном под действием сил тяжести. В данном случае это относится к выставленному упору 28. Одновременно по команде реле 103 и 106 отключается магнит 73 и упор 28 из позиции останова ≈ 1,6 м гидроцилиндром 48 переводится в позицию останова ≈2,0 м, а при этом рама 26 перемещается из положения VI в положение VII. В свою очередь, реле 106 включает пускатель 95, 97 и магнит 79. Поэтому электродвигатель 7 и гидромотор 11 осуществляют совместный разгон тихоходного вала 5 до промежуточной скорости ≈ 0,7-0,8 м/с, при этом двигатель 7, работает на характеристике, близкой к естественной. На этой же скорости перемещаются тяговые органы 2 и траверсы 3, имеющие повышенный момент инерции своих поступательно движущихся масс.
При этом основным тяговым органом при подаче хлыстов на различные длины сортиментов является центрирующий ролик 9, так как он снабжен шипами и установлен на уровне 1 выше уровня II траверс. Поэтому вследствие использования ускоряющей передачи 8 малоинерционный центрирующий ролик 9 начинает перемещать своими шипами лесоматериалы на скорости в 2,5-2 раза большей скорости траверс, т. е. например, ≈1,8 м/с, а вершинная часть при этом перемещается совместно с гладкими траверсами 3 и относительно их. Лесоматериал на повышенной скорости ≈1,8 м/с начинает перемещаться приводами подачи от режущего органа 15 до упора 28, который выставлен в вертикальное положение IV и удерживается в нем под действием силы тяжести. Поэтому на этом этапе упор 28 выполняет роль сигнального флажка, так как при включенном магните 67 магниты 69, 70 и 74 остаются отключенными и следовательно штоковая полость гидроцилиндра 29 остается соединенной практически с сливной магистралью и поэтому при воздействии на выставленный упор 28 он начинает свободно отклоняться.
При отклонении на этом этапе свободно стоящего флажка - упора 28 от вертикального положения IV отключается датчик 49 и его пороговый элемент отключает реле 117. Это реле вновь включает магнит 74, создающий в штоковой полости гидроцилиндра повышенное давление. При этом распределитель с дросселем 62 продолжает соединять напорную 54 магистраль со сливной 55 через вышеуказанный дроссель, поэтому при отклонении упора 28 противодействие с его стороны движущимся лесоматериалом плавно увеличивается и в случае большой запасенной кинематической энергии может открываться предохранительный клапан в узле 57, который после включения магнита 74 становится переливным. Поэтому на последующем этапе отклонения выставленный упор становится ограниченно силовым.
При отключении реле 117 включается реле 119, которое включает реле 143 времени, а последнее с небольшой выдержкой времени (≈ 0,1-0,15 с) срабатывает. Эти реле отключают пускатели 95, 97, магнит 79 и включают пускатель 96 "Назад", магнит 80 "Назад" и магнит 89 уменьшения скорости гидромотора 11 до промежуточной скорости, например, (≈ 0,7-0,8 м/с). Кроме того, реле времени 143 включает магнит 70 и дополнительно включает магнит 74. Поэтому давление в поршневых полостях гидроцилиндров 29, 35 упоров дополнительно увеличивается и предохранительные клапаны в узле 57 вновь могут становиться открытыми и выполнять функции переливного. Поэтому противодействие со стороны отклоняемого упора вновь увеличивается до максимальной величины, но не превышающей, например, вышеуказанной величины ≈20000-25000 Н. При этом дальнейшее увеличение противодействия вновь происходит без значительного увеличения динамических нагрузок по причине возможности использования на этом этапе в случае особо большой запасенной кинетической энергии движущегося хлыста переливного клапана в узле 57. При взаимодействии лесоматериала с упором осуществляют его одновременное торможение приводом и упорами. При этом, как указывалось выше, плавно увеличивают противодействие со стороны упоров движущимся лесоматериалам только после их отклонения от выставленного положения и осуществляют его одновременно с торможением противовключением приводов, причем перемещение лесоматериалов на пониженной скорости прямого направления заканчивают на наклонной поверхности выставленного упора 28, например, в положении XI или близким к нему.
При этом возникает дополнительная тормозная сила со стороны наклонного упора от клина, но при этом исключается за счет возможности скольжения по нему режимов жестких ударов. После окончания безударного перемещения лесоматериалов на пониженной скорости прямого направления по наклонной плоскости упора и торможения под действием выставленного упора и приводов; работающих в обратном направлении VIII, осуществляется кратковременное перемещение лесоматериалов на пониженных скоростях в обратном направлении, например, ≈0,7-0,8 м/с. При этом выставленный упор следит за перемещениями лесоматериалов, так как при обратном перемещении они поджимаются к передним торцам лесоматериалов вследствие того, что скорость поворота упоров выполнена большей, чем скорость приводов в направлении VIII, и составляет, например, 0,8-0,9 м/с.
На этих скоростях лесоматериалы и упор 28 возвращаются в направлении VIII к его рабочему положению IV, где осуществляется останов упора 28, но процесс точного останова лесоматериала продолжается еще далее. При этом еще перед позицией останова упора 28 (положение III), по команде реле 120 времени или 121 осуществляется включение магнита 75 гидроцилиндра 13 тормоза и кратковременное переключение электродвигателя и гидромотора на малую скорость ≈ (0,3-0,4) м/с прямого направления V, так как по команде реле 120 или 121 отключается пускатель 96 (при отключенном пускателе 97), магниты 80, 89 и вновь включаются пускатель 95 магнит 79 и магнит 99. Поэтому в узле 86, работающем с ограничением расхода масла на пониженной скорости ≈ 0,7-0,8 м/с за счет включения магнита 89 и соединения магистралей 91 и 92 через дроссель 93, гидромотор 11 начинает работать с еще большим ограничением расхода, так как после включения магнита 90 магистраль 92 соединяется со сливом уже через дроссель 94, еще боллее уменьшающий расход масла.
Электродвигатель 7 начинает работать после кратковременного отхода лесоматериала от уже остановленного упора 28 на мягкой характеристике в прямом направлении совместно с гидромотором 11, т. е. на малой скорости ≈ 0,3-0,4 м/с, задаваемой гидромотором 11. При этом оба двигателя на малой скорости кратковременно прижимают лесоматериалы в прямом направлении V к противодействующему уже в положении IV с минимальной силой, например 20000-25000 Н. упору 28, который на этом этапе становится полностью силовым и при уже замкнутом механическом тормозе 12.
В положении IV вновь включается датчик 49 и реле 117, а следовательно и реле 122. Последнее включает реле 123 времени и при этом осуществляется кратковременная работа на силовой упор с поиском заданной позиции останова. После срабатывания реле 123 времени осуществляется отключение двигателей 7 и 11 и при замкнутом тормозе 12 отмер длин сортимента с малыми допусками с позиционированием только по силовому упору, которое заканчивается в позиции, соответствующей длине сортимента ≈2 м. При этом наряду с отключением пускателя 95 и магнита 79 реле 123 времени включает в блоке 124 реле 126, которое дает команду на надвигание пильного диска 15 на остановленный лесоматериал. Включается магнит 76 и гидроцилиндр 53 осуществляет надвигание пильного диска 15 на лесоматериал. При этом отключаются датчик 112 его исходного положения и реле 114, которое снимает блокировки в задатчике 99, а поэтому упор 28 убирается в исходное горизонтальное положение III. После пропиливания лесоматериала пильный диск 15 воздействует на конечный выключатель 113 крайнего положения пильного диска 15, включающий реле 115. Это реле отключает реле 118, 119, 121, реле времени 123 и реле 126. Поэтому магнит 76 отключается и пильный диск 15 возвращается в исходное положение.
При возврате пильного диска 15 в исходное положение оператор дает команду на сброску отпиленного сортимента. При этом операция сброски применительно к рассматриваемому здесь короткомерному сортименту длиной ≈2 м осуществляется только поворотной рамой 15. Для ее поворота гидроцилиндром 21 "Вправо" или "Влево" оператор нажимает контакты 129 и 130 крестового переключателя и включает реле 127, 128. Эти реле включают магниты 71 или 72. Поэтому гидроцилиндром 21 осуществляется поворот рамы 16, неподвижной траверсы 32 и подвижных траверс 30 и 31 в необходимом направлении для осуществления операции сброски отпиленного коротмерного сортимента.
При сброске включается реле 131 и реле времени 132. Это реле после окончания сброски отпиленного сортимента включает магнит 73, и во время подъема рамы 16 в горизонтальное положение гидроцилиндром 48 осуществляется возврат подвижной рамы 26 из положения VII в исходное положение VI.
Таким образом еще до последующей подачи лесоматериалов осуществляется возврат подвижной рамы 26 в исходное положение, что исключает какие-либо задержки по последующей подаче.
В а р и а н т 2. Осуществляется отмер сортимента с увеличенными допусками, например, длиной ≈ 3,6 м. При этом дополнительные перемещения и отсчет их расстояний в обратных направлениях относительно выставленного упора в вышеуказанную позицию безупорного отмера начинают при проведении отмера силовыми упорами и при их возврате и останове в выставленных положениях, при этом приводами лесоматериалы продолжают перемещать на пониженной скорости обратного направлении за выставленные упоры и отводят от них лесоматериалы, а затем перед позицией безупорного отмера и отключения приводов их переводят на малую скорость обратного направления относительно выставленного в положение IV второго упора 36. Например, для осуществления автоматизированного отмера сортимента длиной 3,6 м в задатчике 99 включается реле 104 и реле 106. При этом включается магнит 68, и в вертикальное положение IV уже выставляется второй упор 36, и он также становится свободно стоящим и первоначально выполняющим роль cигнального флажка. Работа при предварительном позиционировании по силовому упору осуществляется аналогично вышеприведенного до срабатывания реле 119 и перевода приводов на перемещение лесоматериалов в обратном направлении VIII.
Вместе с тем, отличие заключается в том, что в блоке III после включения реле 119 другие реле уже не включаются. Однако при безупорном позиционировании в блоке 133 при возврате упора в вертикальное положение IV включается реле 135. Это реле отключает магнит 89 и включает магниты 90 и 75. Поэтому дается команда на предварительное, перед остановом, замыкание механического тормоза 12, и перемещающиеся здесь на пониженной скорости ≈0,7-0,8 м/с обратного направления VIII лесоматериалы после возвращения и останова упора 36 в положении IV по команде реле 135 переходят на малую скорость обратного направления VIII, с началом отсчета пройденного пути от возвращенного в положение IV упора 36, здесь в функции времени, так как также отключается магнит 89 и включается магнит 90 и, кроме того, включается реле 136 времени. При этом реле 136 времени входит в составе схемы определения расстояний перемещений лесоматериалов от выставленных упоров в функции времени, т. е. здесь выполняет функцию таймера. После срабатывания реле 136 времени двигатели 7 и 11 в блоках 107 и 108 отключаются и при предварительно замкнутом тормозе 12 заканчивается окончательное безупорное позиционирование лесоматериала в позицию ≈ 3,6 м с увеличенными допусками.
Далее реле 136 вновь включает реле 126 надвигания пильного диска и далее работа здесь осуществляется аналогично рассмотренному выше варианту.
В а р и а н т 3. Осуществляется также отмер сортимента, например, длиной ≈ 6,0 м. При этом отмер длины этого сортимента с увеличенными допусками осуществляют так, что после взаимодействия лесоматериалов с упором 36 их дополнительно перемещают на большой пониженной и малой скоростях, например, в прямом направлении или в обратном относительно выставленного упора до заданных позиций безупорного отмера с началом отсчета расстояний дополнительных перемещений от выставленных в вертикальное положение упоров.
Для осуществления автоматизированного в задатчике 99 включает реле 105 и 106. При этом вновь выставляется второй упор 36, и работа до отключения в блоке 111 реле 117 осуществляется аналогично первому варианту. Затем начинает работать схема определения расстояний перемещений лесоматериалов от упора 36 в функции времени, которая используется здесь в блоке 133 после включения реле 105. При этом выставленный упор 36 вновь включает реле 117, а последнее реле 137. После незначительного отклонения на большой скорости выставленного упора 36 включается реле 141 и отключается реле 117. При этом включается магнит 74, отключается магнит 68 и гидроцилиндром 35 упор 36 устанавливается из положения IV в положение III, т. е. по ходу движения лесоматериала. Одновременно по команде реле 141 включается реле 138 времени, которое в блоке 133 совместно с реле 139, 140 времени выполняют функцию таймера в схеме определения расстояний перемещений лесоматериалов от упоров в функции времени с отсчетом здесь пройденного пути от выставленного упора 36 в прямом направлении V. Реле 138 времени перед позицией останова отключает пускатель 97 и включает магнит 89. Осуществляется интенсивное дроссельное торможение гидромотора 11 и перевод лесоматериалов на промежуточную скорость ≈0,7-0,8 м/с при работе гидромотора 11 и электродвигателя 7 на суммарной характеристике. При этом расход масла в гидромоторе 11 уменьшается дросселем 93.
В свою очередь, реле времени 139 включает магнит 75 и переводит лесоматериалы на малую скорость ≈ 0,3-0,4 м/с при уже замкнутом механическом тормозе. Одновременно еще при перемещении передней части лесоматериала по горизонтальному лотку 33 оператор контактами 129, 130 включает 127, 128 и магниты 71 и 72, а поэтому еще до начала раскряжевки поворотная рама 16 наклоняется в положение "Влево" или "Вправо". На малой скорости ≈ 0,3-0,4 м/с при уже замкнутом механическом тормозе 12 по команде реле 140 времени осуществляется точный останов лесоматериала в позицию ≈ 6,0 м при перемещении лесоматериалов после выставленного упора 36 в прямом направлении V. Также по команде реле 140 времени дается команда на надвигание пильного диска 15 на лесоматериал и включается реле 126 надвигания пилы.
После пропиливания лесоматериала срабатывает реле 115, которое при включенном реле 125 включает магнит 68 подъема упора 36. При этом при пропиливании пильным диском 15 лесоматериала его задняя часть при повернутой раме 16 без осуществления операции сброски сразу же падает на соответствующий сортировочный транспортер (не показан). Одновременно и его передняя часть также надежно сбрасывается и с горизонтального лотка 33, так как он выполнен по ширине меньшим, чем поворотная рама 16, а также потому, что она установлена на уровне IX ниже уровня Х траверс. Кроме того, более надежной сброске задней части отпиленного длинномерного сортимента здесь способствует также и то, что после пропиливания лесоматериала при включенном реле 125 и включенном реле 115 включаетcя магнит 68 и упор 36 из положения III кратковременно приподнимаетcя и помогает cброcке передней чаcти cортимента до cрабатывания реле времени 132, которое отключает реле 125, и упор 68 вновь опускается в положение III. При этом схема вновь подготавливается к дальнейшей подаче.
В а р и а н т 4. Осуществление возврата неправильно отпиленных сортиментов, преимущественно длинномерных. Этот вариант реализуется следующим образом.
Одновременно с перемещением лесоматериалов один из упоров отмера короткомерных лесоматериалов дополнительно поступательно перемещают в исходное положение относительно приемного стола, а затем после раскряжевки при возврате неправильно отпиленного сортимента упор переводят в наклонное положение, сцепляют его с полученным сортиментом и перемещают упор и сортимент в обратном направлении относительно приемного стола.
В варианте 3 было показано, что при подачах лесоматериалов в позиции длинномерных сортиментов перемещается из положения VI в положение VII. Поэтому если при подаче лесоматериалов на длину протяженного сортимента после срабатывания реле 115 и после пропиливания лесоматериала окажется, что задний торец отпиленного сортимента является дефектным, то в блоке 142 свободной и принудительной установки поворотных упоров в различные положения оператором включается кнопкой 150 реле 145 и поэтому дается команда на принудительный подъем первого упора 28.
После подъема первого упора 28 в наклонное положение, например XI, кнопкой 149 включается реле 144, которое включает магниты 69 и 73. Поэтому принудительно поднятый упор 28, в свою очередь, приподнимает заднюю часть отпиленного длинномерного сортимента и при этом шипами 42 интенсивно с ним сцепляется. Кроме того, после включения магнита 69 упор 28 остается в наклонном положении ХI и под действием гидроцилиндра 48 совместно с подвижной рамой 26 начинает перемещаться из положения VII в положение VI.
Поэтому задний торец отпиленного сортимента от пильного диска 15 перемещается в направлении VIII к центрирующему ролику 9 и оказывается над его шипами. Оператор нажимает кнопку 154 окончания возврата неправильно отпиленного сортимента и его задняя часть опускается при опускании первого упора 28 и интенсивно сцепляется с шипами центрирующего ролика 9, которым неправильно отпиленный сортимент далее может перемещаться в новую позицию, соответствующую исправленной длине.
В а р и а н т 5. Перемещение лесоматериалов малых масс. При этом при перемещениях тонкомерных лесоматериалов упор кратковременно принудительно поворачивают из вертикального положения. Это вызвано тем, что подобные лесоматериалы могут не отклонить даже свободно стоящие в положении IV упоры 28 и 36.
В этих случаях оператор кратковременно в блоке 142 включает реле 146 или 148, а последние отключают магниты 67 и 68. Поэтому выставленный упор кратковременно отклоняется, а далее процесс отмера заданной длины в автоматизированном режиме продолжается как и ранее.
В а р и а н т 6. Осуществление одновременной подачи нескольких (2-3) лесоматериалов. В этом случае, вначале в выставленном положении силу противодействия выставленных упоров движущимися лесоматериалами принудительно увеличивают, а затем после окончания выравнивания торцов лесоматериалов выставленный упор вновь начинают удерживать в вертикальном положении только под действием сил тяжести.
При этом до выставленного упора лесоматериалы перемещаются в ручном режиме на большой и пониженных скоростях. Затем в блоке 142 включают реле 145 или 147 и выставленные упоры принудительно выставляются в вертикальное положение IV и становятся силовыми.
Поэтому далее вначале осуществляется операция выравнивания торцов нескольких одновременно перемещаемых лесоматериалов, а затем в задатчике 99 выдается заказ, а кнопки 150 или 152 отпускаются. Затем работа осуществляется аналогично приведенной ранее.
В а р и а н т 7. Работа устройства на этапе безупорного позиционирования осуществляется с использованием в блоке предварительного отмера упорами и окончательного безупорного отмера c началом отcчета пройденного пути определения расстояний перемещений лесоматериалов от упоров в функции числа импульсов датчика, соединенного с центрирующим роликом.
При этом счетчик импульсов 156 начинает участвовать в отсчете пройденного пути лесоматериалами от упоров в функции числа импульсов, выданных датчиком 156 по команде схемы 157 разрешения начала отсчета.
После нажатия соответствующей кнопки задания длины отмеряемого сортимента от задатчика 99 для каждой длины в счетчик 160 поступают коды сортиментов в виде первоначально задаваемых чисел импуль- сов в регистры управляемые переключением приводов с большой на промежуточную скорости, с промежуточной на малую скорость и на остановку. Далее после разрешения в схеме 157 начала отсчетов импульсов, они начинают поступать о датчика 156 импульсов в регистры счетчика 160. При достижении первой позиции переключения привода с большой на пониженную скорость, этот регистр "переполняется импульсами" и из счетчика 160 поступает сигнал в первый канал управления приводом с триггером 169, выходным усилителем 165 и электронным ключом 164, которые в схеме управления приводами дают команду на привод приводов на промежуточную скорость ≈ 0,7-0,8 м/с. На этой скорости "переполняется импульсами" второй регистр счетчика 160 и он по второму каналу управления с триггером 168, усилителем 167 и электронным ключом 163 дает команду приводу на замыкание механического тормоза и на переход его на малую скорость ≈ 0,3-0,4 м/с.
В свою очеpедь, на этой скорости "переполняется импульсами" третий регистр счетчика 160, и он дает команду на отключение привода. (56) Авторское свидетельство СССР N 1544556, кл. В 27 В 27/10, 1990.



Сущность изобретения: перед отклонением хлыстами выставленных упоров 28, 36 их вначале удерживают в выставленных положениях только под действием сил тяжести, используя их в качестве свободно отклоняемых сигнальных несиловых флажков-упоров. После начала отклонения упоров осуществляется отсечение поршневых полостей от слива. Происходит плавное нарастание противодействия движущимся хлыстам со стороны упоров 28, 36, которые на этом этапе становятся ограниченно силовыми. Одновременно с началом отклонения упора многоскоростной привод переводится на промежуточную скорость обратного направления. При этом интенсифицируется процесс торможения. Под действием многоскоростного привода подачи осуществляется кратковременный возврат лесоматериалов в обратном направлении, упоры поджимаются к передним торцам хлыстов и следят за их перемещением. Многоскоростному приводу дается команда на перемещение хлыстов с малой скоростью прямого направления и кратковременной их работой на силовой упор. Отмер с упорами осуществляется применительно к сортиментам с малыми допусками. Для остальных сортиментов после взаимодействия хлыстов со свободно стоящими и выполняющими функции сигнальных флажков-упоров 28, 36 по команде датчиков 49, 50 начинается отсчет пройденного лесоматериалами пути в функции времени или с помощью датчика и счетчика импульсов, по командам которых осуществляется окончательный безупорный отмер длин сортиментов. 2 с. и 15 з. п. ф-лы, 15 ил.