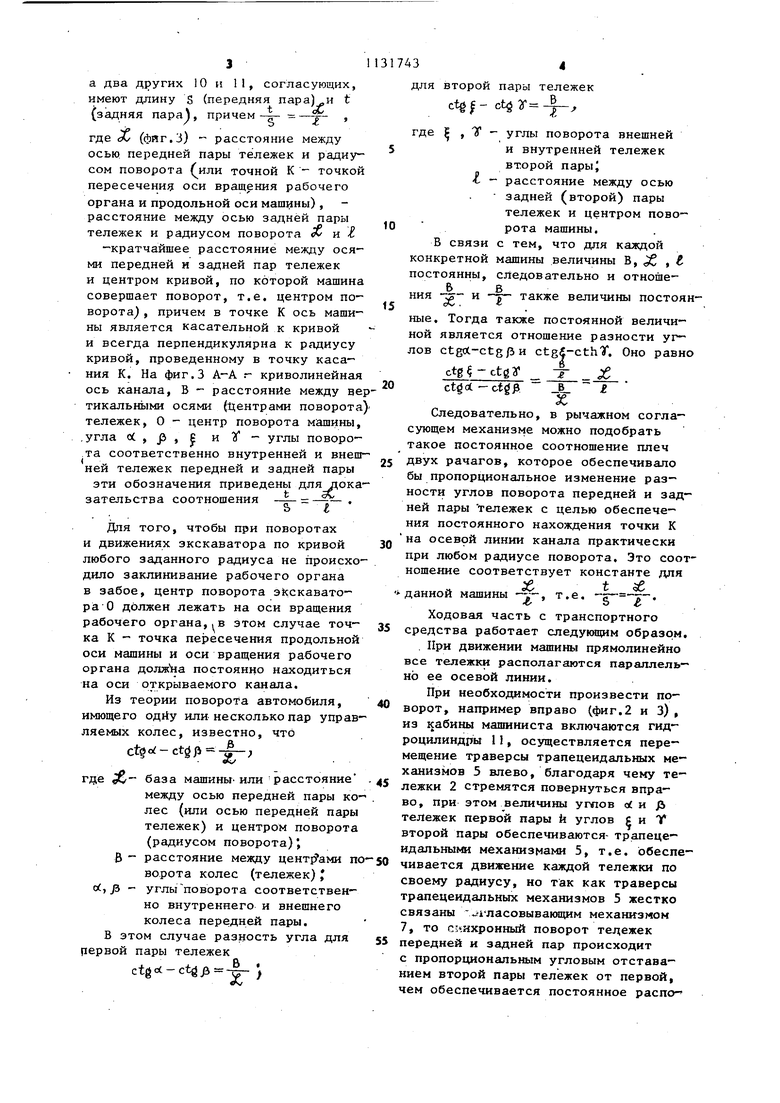
Изобретение относится к самоходным машинам, в частности к ходовой части самоходных машин, например экскаваторов. Известен механизм передвижения самоходной машины, содержащий раму, передние и задние мосты с гусеничны ми тележками, закр -пленными на моетах шарнирно, мосты между собой соч ленены также шарнирно l. Недостатками известной конструкции являются увеличенная длина, юз гузениц, нерациональная кинематика поворота. Известна также ходовая транспортного средства, содержащая раму, кодовые тележки, закрепленные на раме шарнирно с возможностью поворота в плане и качания вокруг горизонтальной оси, перпендикулярной напранлению движения 21 . Недостатками данной ходовой части являются низкая маневренность ма шины при поворотах (в рабочем поло- жении)из-за конструктивных особен-ностей кодовой части, позволяющих производить поворот только заторма- яшванием левой или правой пар тележек (которые идут юзом) и не дающих возможность производить поворот машины по заданному радиусу (поворачивают црй этом все тележк1 5 в резул тате при отклонении машины от оси открываемого канала (или при поворо те оси канала) доворот ее (или пово ротУ осуществляется в несколько эта пов 5равыкамИэ что во-первых,приводит к дополнительным затратам мощности, во-вторых, к появлению значительных нагрузок в элементах рамы, и, в тре тьих, приводи к заклиниванию рабочего органа в канале, так как центр поворота машины также находится в зоне гусеничного движителя, и рабочий орган в момент доворота смещает ся в противоположную сторону от продольной оси канала сторону. Цель изобретения - повышение маневренности машины путем обеспечения поворота по заданному радиусу. оставленная цель достигается тем, что Б ходовой части транспортного средст.за, содержащей раму и ходовые телЕжкй- закрепленные на ра ме шарнирно с возможностью поворота в плане и .качания вокруг горизонтал ной оси, перпендикулярной направлению движения, тележки каждой пары связаны между собой трапецеидальным 432 мехлнизмом, а каждая пара тележек связана с последующей согласовывающим механизмом, кинематически связанным с трапецеидальным, причем согла- совывающий механизм выполнен в виде тяг и Г-образных рычагов, длины сог- ласую цих плеч которых находятся между собой в следующей зависимости f- i t где t - дина согласующего плеча Г-об- разного рычага задней пары тележек, 5 - длина согласующего плеча Г-образного рычага передней пары тележек rv - расстояние между осью передней пары и радиусом поворота (совпадающим с осью вращения рабочего органя) , с - расстояние между осью задней пары и радиусом поворота. На фиг.1 изображена ходовая часть экскаватора, нл фиг. 2 - ходовая часть в плане трапецеидальным и согласовывающим механизмами) нг1 фиг.З - кинематика поворота машины по заданной кривой. Ходовая часть самоходной машины состоит (фиг.1) из рамы I с прикрепленными к ней попарно тележками 2, Каждая тележка имеет траверсу 3, позволяющую тележке качаться вокруг оси, перпендикулярной направлению движения. Передняя пара тележек крепится к раме 1 через поперечный балансир 4, который, в свою очередь, укреплен на раме шарнирно и имеет возможность качания в плоскости, перпендикулярной продольной оси машины, задняя пара тележек укреплена непосредственно на раме 1. Кроме того, тележки могут совершать разворот в плане, так как имеют шарнирные вертикальные оси. Тележки каждой пары соединены между собой трапецеидальным механизмом 5 (фиг.2) обычной конструкции, имеющим гидроцилиндры 6, которые осуществляют поворот тележек в пла- Передняя и задняя пары тележек соединены согласовывающим механизмом 7, крайние тяги 8 которого прикреплены к тягам трапецеидальных механизмов 5, Согласовывающий механизм 7 состоит помимо тяг 8 из двух Г-об- разных рычагов 9, два плеча которых равны между собой по длине (П) , a два других Юн 11, согласующих, имеют длину S (передняя пара)и t (задняя пара), причем- - -Ф- , /D где сС (фяг.З) расстояние между осью передней пары тележек и радиусом поворота (или точной К - точкой пересечение оси вращения рабочего органа и продольной оси машины) , расстояние между осью задней пары тележек и радиусом поворота и -с -кратчайшее расстояние между осями передней и задней пар тележек и центром кривой, по которой машина совершает поворот, т.е. центром поворота) , причем в точке К ось машины является касательной к кривой и всегда перпендикулярна к радиусу кривой, проведенному в точку касания К. На фиг.З А-А .- криволинейная ось канала, В - расстояние между ве тикальнь1ми осями (Центрами поворота тележек, О - центр поворота машины .угла ot , J3 , Р и У - углы поворота соответственно внутренней и внеш ней тележек передней и задней пары эти обозначения приведены длядока зательства соотношения -|- - о о Для того, чтобы при поворотах и движениях экскаватора по кривой любого заданного радиуса не происхо дило заклинивание рабочего органа в забое, центр поворота эКскавато- ра О должен лежать на оси вращения рабочего органа,,в этом случае точ- ка К - точка пересечения продольной оси машины и оси вращения рабочего органа должна постоянно находиться на оси открываемого канала. Из теории поворота автомобиля, имющего одйу или несколько пар управ ляемых колес, известно, что -A, где - база машинЫили расстояние между осью передней пары ко лес (или осью передней пары тележек) и центром поворота (радиусом поворота), В - расстояние между цент1 ами п ворота колес (тележек)J о(, J3 - углыповорота соответственно внутреннего и внешнего колеса передней пары. В этом случае разность угла для рервой пары тележек ctgct-ctg - ; для второй пары тележек сЦУ.-| где , Т - углы поворота внешней и внутренней тележек второй пары ь - расстояние между осью задней (второй) пары тележек и центром поворота машины. В связи с тем, что для каждой конкретной машины величины В, , и постоянны, следовательно и отноше- ВВ ния и Т также величины постоянные. Тогда также постоянной величиной является отношение разности углов ctffH-ctgftn ctg$-cthT. Оно равно ctg ctgy 4 ;С ctgoc-ctg в г Следовательно, в рычажном согласующем механизме можно подобрать такое постоянное соотношение плеч двух рачагов, которое обеспечивало бы пропорциональное изменение разности углов поворота передней и задней пары тележек с целью обеспечения постоянного нахождения точки К на осеврй линии канала практически при любом радиусе поворота. Это соотношение соответствует константе для ;е t данной машины у, т.е. . Ходовая часть с транспортного средства работает следукицин образом. При движении машины прямолинейно все тележки располагаются параллельно ее осевой линии. При необходимости произвести поворот, например вправо (фиг.2 и 3) , из кабины машиниста включаются гидроцилиндры 1I, осуществляется перемещение траверсы трапецеидальных механизмов 5 влево, благодаря чему тележки 2 стремятся повернуться вправо, при этом величины углов а( и /Ь теЛежек первой пары и углов g и Т второй пары обеспечиваются- трапецеидальными механизмами 5, т.е. обеспечивается движение каждой тележки по своему радиусу, но так как траверсы трапецеидальных механизмов 5 жестко связаны - гласовывающим механизмом 7, то слнхронный поворот тедежек передней и задней пар происходит с пропорциональным угловым отставанием второй пары тележек от первой, чем обеспечивается постоянное распо
ложение.точки К пересечения продольной оси машины с осью вращения рабочего органа на осевой линии открываемого канала при любом заданном радиусе поворота машины.
Для точного поворота машины по любому заданному радиусу каждый конкретный тип машин можно оснастить таблицей, в которой указаны зависимости радиуса поворота от угла поворота какой-либо одной тележки, В этом случае в кабине .должен быть установлен датчик угла поворота данной тележки в правую и в левую стороны.
Для поворота машины по любому радиусу машинист по таблице выбирает соответствующие этому радиусу углы ОС, J5 , , У н подает сигнал на гидроцилиндры 6,
Коструктивные особенности изобретения (наличие трапецеидального механизма и связанного с ним согласовывающего механизма, согласующие плечи которого связаны между собой и с основными параметрами машины зависимостью t sC
позволяют повы-
Ъ сить маневренность машины при поворотах и доворотах, так как они обеспечивают поворот машины по заданному радиусу без затормаживания левой или правой пар тележек, благодаря чему при поворотах юз тележек становится минимальнь м и ликвидируются дополнительные затраты мощности и дополнительные нагрузки в элfмeнтax рамы, предотвращаетсязащемление рабочего органа в забое, обеспечивается рациональная компоновка машины.
более равномерно распределяется давление на грунт.
Ходовая часть может быть исполь- зована на любой самоходной машине, имеющей три, четыре и более (как гусеничные, так и колесные) тележки При этом машина может быть без рабочего органа. При наличии рабочего органа последний может располагаться как сзади, так и спереди,, но тогда соотношение приобретает вид
5 5 -г-- --р-. Если машина не имеет рабо-
чего органа, то расположение точки К можно выбрать, исходя из требования максимальной маневренности машины, ЕЕ возможно применить на широком ряде землеройных, мелиоративных,
строительных и других машин-, имеющих гусеничные и пневмоколесные тележки. Она обеспечивает поворот всех тележек передней и задней пар с минимальным юзом на различные уг-
лы с угловым отставанием тележек задней пары, что в свою очередь обеспечивает поворот машины по кривой заданного радиуса, при зтом продольная ось машины является касательной
0 к этой кривой в заданной точке К, расположение которой на продольной оси машины выбирается конкретно для каждой машины в зависимости от ее назначения (для заявляемой машины,
5 экскаватора-каналокопателя она находится на оси вращения рабочего органа, создаваемая тем самым оптимальные условия для работы), причем расположение точки К не меняется при повороте машины по любому радиусу. л xC-SCS. . f ( у У-.У), тГ, i,/yi.,.fii4- /777 /77/ ////1 /// г 1 Фиг.1
Фиг.З

| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕЖКА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ С БОРТОВЫМ СПОСОБОМ ПОВОРОТА | 1993 |
|
RU2121447C1 |
| МАШИНА ДЛЯ ПОСЛОЙНОГО ФРЕЗЕРОВАНИЯ ГОРНЫХ ПОРОД | 1995 |
|
RU2098565C1 |
| Машина фронтальная портального типа для обработки грунта | 2018 |
|
RU2700298C1 |
| Самоходная машина | 1983 |
|
SU1404379A1 |
| ДВУХОСНАЯ ЛОКОМОТИВНАЯ ТЕЛЕЖКА С РАДИАЛЬНОЙ УСТАНОВКОЙ КОЛЕСНЫХ ПАР | 2005 |
|
RU2291079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА, ХАРАКТЕРИЗУЮЩЕГО СОСТОЯНИЕ СИСТЕМЫ КОЛЕСО - РЕЛЬС, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061610C1 |
| КОРНЕКЛУБНЕУБОРОЧНЫЙ АГРЕГАТ И.Г.МУХИНА | 1996 |
|
RU2104630C1 |
| ПУТЕВАЯ МАШИНА | 2008 |
|
RU2376409C1 |
| Машина для шлифования полов | 1984 |
|
SU1247243A1 |
| Способ определения кривизны круговых кривых в плане железнодорожной колеи | 1989 |
|
SU1691447A1 |


ХОДОВАЯ ЧАСТЬ ТРАНСПОРТНОГО СРЕДСТВА, содержащая раму и ходовые тележки, закрепленные на раме шарнирно с возможностью поворота в планл и качания вокруг горизонтальной оси, перпендикулярной напрадпению движения, отличающаяся тем, что, с целью повышения маневренности машины путем обеспечения поворота по заданному радиусу, тележки каждой пары связаны между собой трапецеидальным . механизмбм, а каждая пара тележек соединена с последующей сргласовывакщим механизмом, кинематически связанным с трапецеидальным, причем согласовывающий механизм выполнен в виде тяг и Г-образных рычагов, длины согласукнцих плеч которых находятся между собой в следующей зависимости Т Т где t - длина согласунщего плеча Г-образного рычага задней пары тележек; S - длина согласующего плеча Г-образного рычага передней пары тележек; Срасстояние между осью передней пары тележек и радиусом поворота, t - расстояние между осью задней пары тележек и радиусом поворота. оо со
| h | |||
| Патент США № 3869010, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3677427, кл | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
