2. Машина по п. 1, отличающаяся тем, что она снабжена расположеиньми с ее боков дополниI
Изобретение относится к машино- , строению и может быть использовано при создании оборудования, предназначенного для обработки бетонных, полимерцементных и других твердых монолитных полов в зданиях и на площадках .
Цель изобретения - повышение производительности и качества обработки за счет регулярной корректировки направления движения машины путем торможения опережающих колес и сокращения времени изменения направления движения машины путем поворота всех колес.
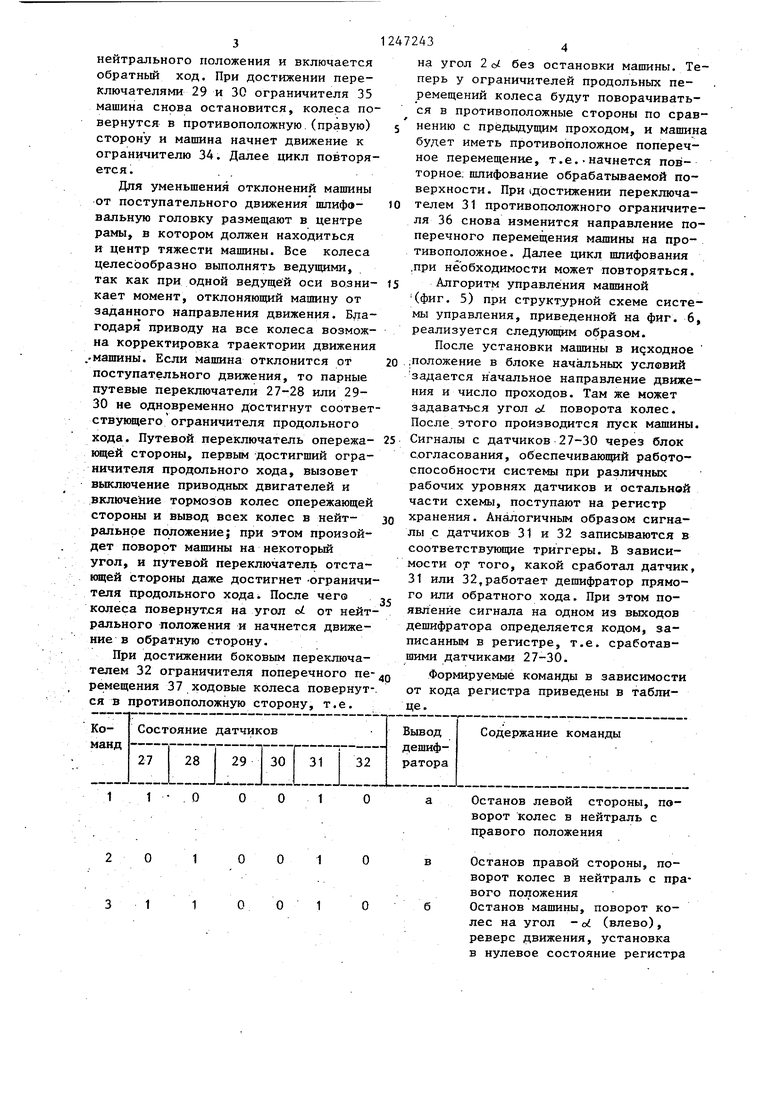
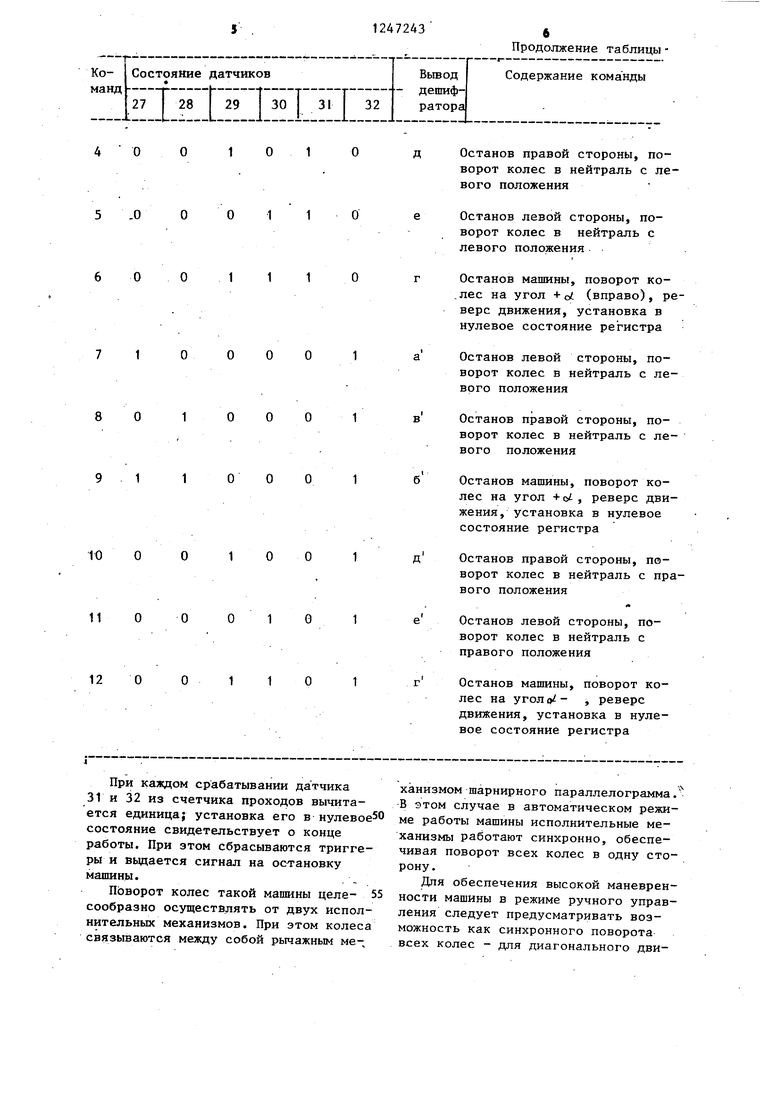
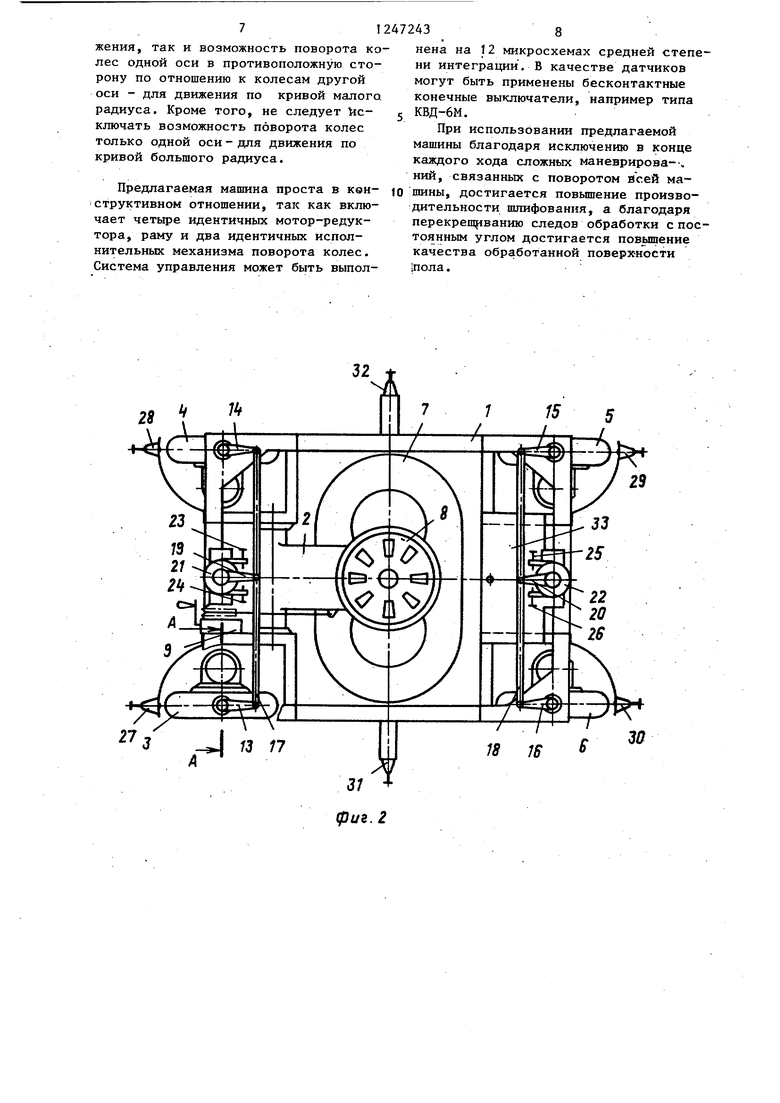
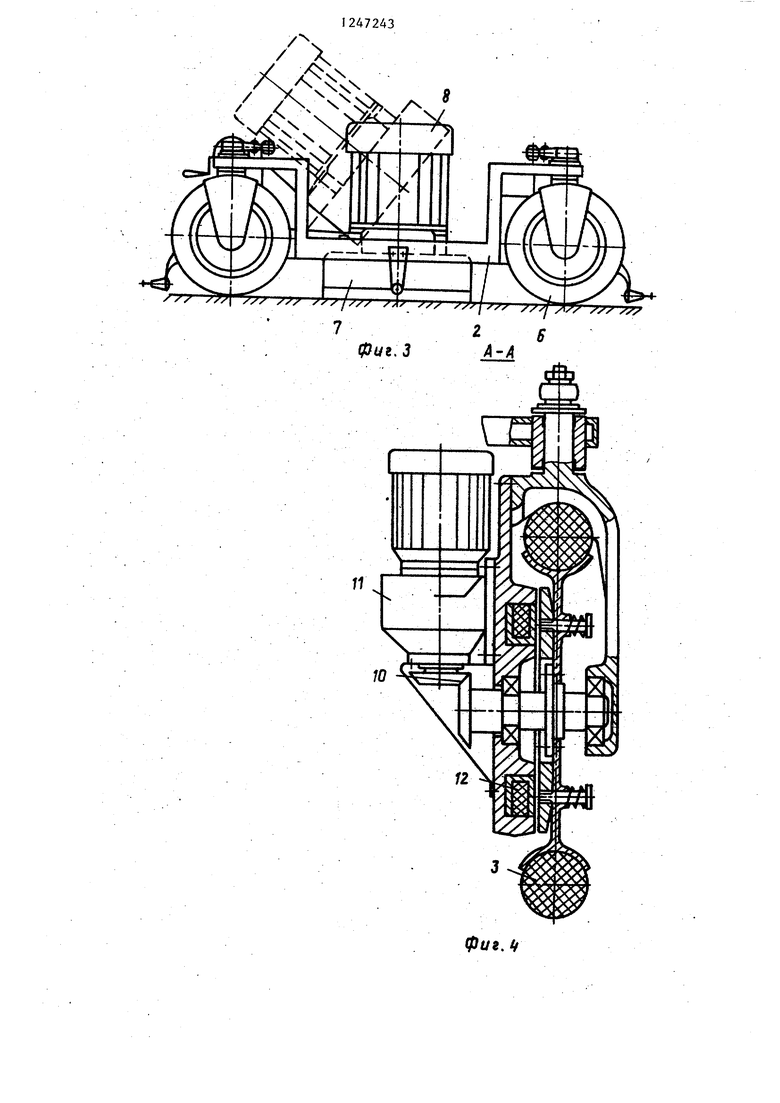
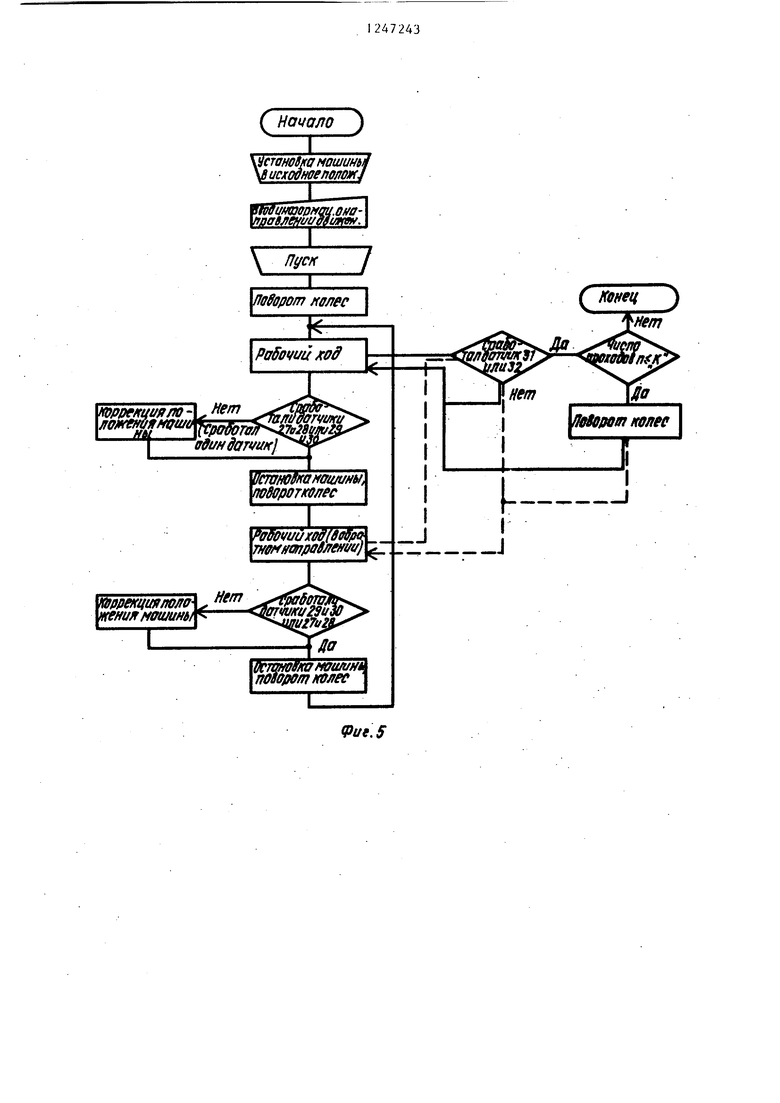
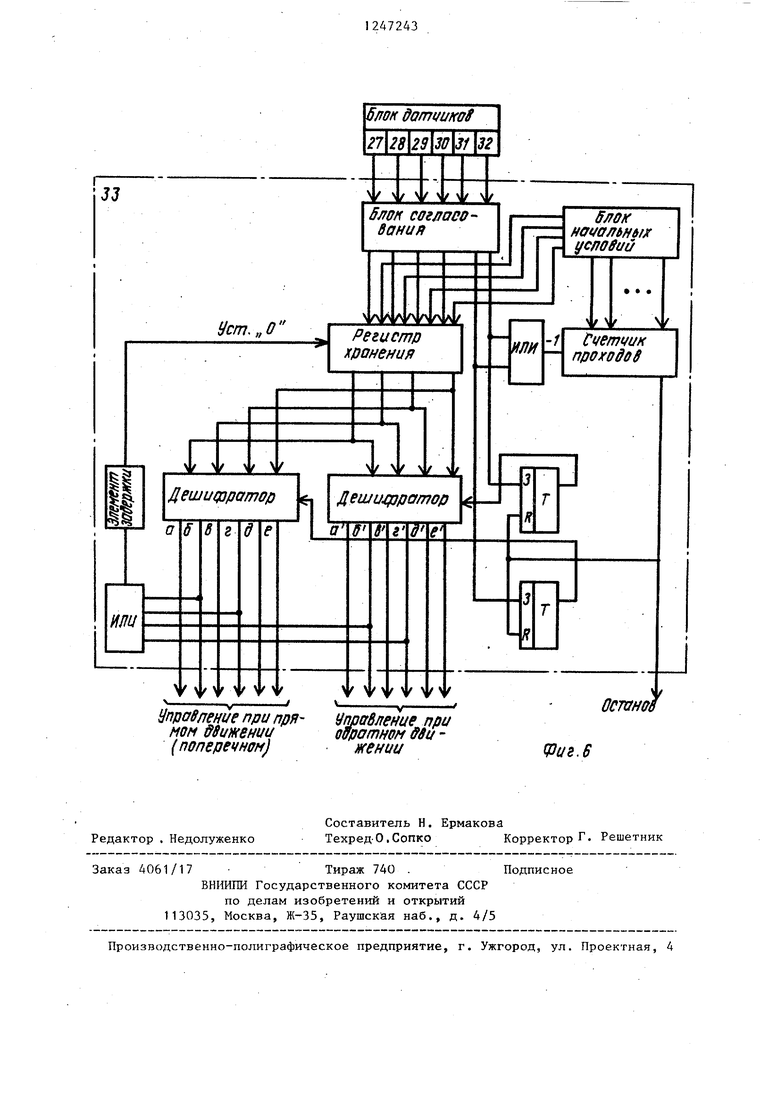
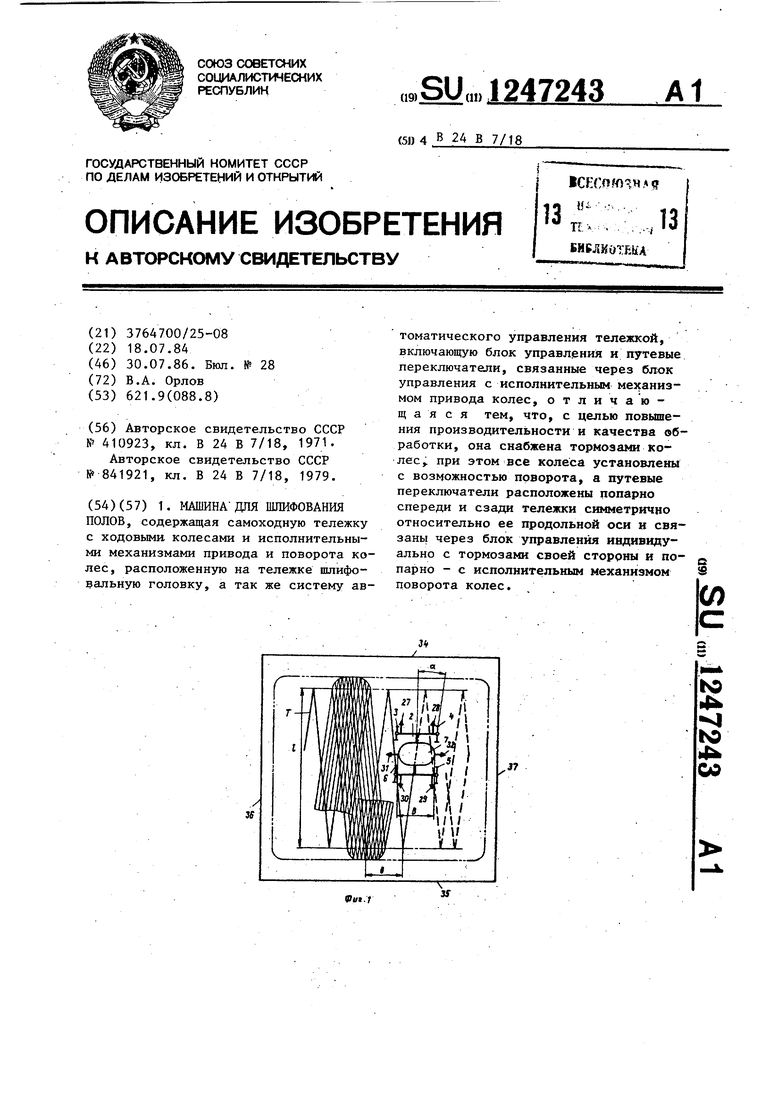
На фиг. 1 изображена схема перемещения машины по обрабатываемому участку пола; на фиг. 2 - машина, вид в плане; на фиг. 3 - то же, вид сбоку; на фиг . 4 - разрез А-А на фиг. 2; на фиг. 5 - алгоритм управления ; на фиг. 6 - структурная схема системы управления машиной.
При шлифовании пола машина перемешается по зигзагообразной траектории 7 с шагом 6 , равным или несколько меньшим ширины /в захвата рабочего органа, и амплитудой С , равной величине продольного перемещения машины, т.е. за один продольный проход машина смещается в поперечном направлении на расстояние, не превьш1ающее половины ширины захвата рабочего органа. Такая траектория движения получается благодаря поочередному реверсированию хода машины с поворотом всех ходовых колеч на угол Ы. то в одну, то в другую сторону от нейтрального положения. Величина угла о/ определяется из выражения:
Ы.
arctg
21
Для исключения возможных пропусков необработанной поверхности между смежными проходами угол поворота колес на машине регулируют на величину, несколько меньшую расчетной.
тельными путевымипереключателями,связанными через блок управления с исполнительным механизмомповорота колес.
Машина содержит раму 1 самоходной тележки 2 с ходовыми колесами 3-6, на которой смонтирована шлифовальная головка 7 с приводом 8. Для подъема
шлифовальной головки при замене шлифовальных кругов и переездах служит лебедка 9.
Ходовые колеса 3-6 через конические пары шестерен 10 связаны с моторредукторами 11. Соосно с ходовыми колесами расположены электромагнитные тормоза 12.
Если в конструкции привода колес заложены необратимые передачи, напри5 мер червячные редукторы с большим передаточным числом, то специальные тормоза не требуются. Они не требуются и в том случае, когда для привода колес используются двигатели со
0 встроенными электромагнитными тормозами.
Ходовые колеса поворачиваются вокруг вертикальных осей с помощью рычагов 13 - 16, попарно связанных между
5 собой поперечными тягами 17 и 18. Рычагами 19 и 20 поперечные тяги связаны с исполнительными механизмами 21 и 22 устррйства поворота ходовых колес. Дпя регулирования величины
0 угла поворота рычагов 19 и 20, а следовательно, и угла поворота ходовых колес 3-6 служат регулировочные винты 23-26. Спереди и сзади машины расположены путевые переключатели 28-30,
5 а с боков путевые переключатели 31 и 32. На тележке установлен блок 33 уп- раЪлёния.
Обрабатываемый участок пола ограж- дд дается ограничителями 34 и У5 продольного хода машины и ограничителями 36 и 37 поперечного перемещения. Машина работает следующим образом. При достижении путевыми переключателями, например 27 и 28 (см. фиг.1), ограничителя 34 машина останавливается, колеса поворачиваются на угол ы. в противоположную (левую) сторону от
3
нейтрального положения и включается обратный ход. При достижении переключателями 29 и 30 ограничителя 35 машина снова остановится, колеса повернутся в противоположную.(правую) сторону и машина начнет движение к ограничителю 34. Далее цикл повторяется.
Для уменьшения отклонений машины от поступательного движения шлифовальную головку размещают в центре рамы, в котором должен находиться и центр тяжести машины. Все колеса целесообразно выполнять ведущими, так как при одной ведущей оси возникает момент, отклоняющий машину от заданного направления движения. Благодаря приводу на все колеса возможна корректировка траектории движения машины. Если машина отклонится от поступательного движения, то парные путевые переключатели 27-28 или 29- 30 не одновременно достигнут соответствующего ограничителя продольного хода. Путевой переключатель опережа- кицей стороны, первым достигший ограничителя продольного хода, вызовет выключение приводных двигателей и включение тормозов колес опережающей стороны и вывод всех колес в нейтральное пс11ложение; при этом произойдет поворот машины на некоторый угол, и путевой переключатель отста- кнцей стороны даже достигнет -ограничителя продольного хода. После чего колеса повернутся на угол с/ от нейтрального положения и начнется движение в обратную сторону.
При достижении боковым переключателем 32 ограничителя поперечного перемещения 37 ходовые колеса повернут ся в противоположную сторону, т.е.
О О
0
472434
на угол 2 oL без остановки машины. Теперь у ограничителей продольных перемещений колеса будут поворачиваться в противоположные стороны по срав- 5 нению с прёдьщущим проходом, и машина будет иметь противоположное поперечное перемещение, т.е.начнется повторное шлифование обрабатываемой поверхности. При (Достижении переключателем 31 противоположного ограничителя 36 снова изменится направление поперечного перемещения машины на противоположное. Далее цикл пшифования ,при необходимости может повторяться.
.Алгоритм управления машиной (фиг. 5) при структурной схеме системы управления, приведенной на фиг. 6, реализуется следующим образом.
После установки машины в идходное ;положение в блоке начальных условий задается начальное направление движения и число проходов. Там же может задава г ься угол d поворота колес. После этого производится пуск машины. Сигналы с датчиков 27-30 через блок
5
0
5
согласования, обеспечивающий работоспособности системы при различных рабочих уровнях датчиков и остальной части схемы, поступают на регистр хранения. Аналогичным образом сигналы с датчиков 31 и 32 записываются в соответствующие триггеры. В зависимости Of того, какой сработал датчик, 31 или 32,работает дешифратор прямого или обратного хода. При этом появление сигнала на одном из выходов дешифратора определяется кодом, записанным в регистре, т.е. сработавшими датчиками 27-30.
Формируемые команды в зависимости от кода регистра приведены в таблице.
Останов левой стороны, поворот колес в нейтраль с правого положения
Останов правой стороны, поворот колес в нейтраль с правого положения Останов машины, поворот колес на угол - oi (влево) , реверс движения, установка в нулевое состояние регистра
4 О О 101 О
5-0 О О 1 1 О
600 1 1 1 О
71 0000 1
80 1 0001
91 1 000 1
100 О 1 00 1
11 О О 0101
12 О 0110 1
При каждом срабатывании датчика 31 и 32 из счетчика проходов вычитается единица; установка его в нулевое О состояние свидетельствует о конце работы. При этом сбрасываются триггеры и вьодается сигнал на остановку машины.
Поворот колес такой машины целе- 55 сообразно осуществлять от двух исполнительных механизмов. При этом колеса связываются между собой рычажным мед Останов правой стороны, поворот колес в нейтраль с левого положения
Останов левой стороны, поворот колес в нейтраль с левого положения
Останов машины, поворот ко- .лес на угол + oL (вправо), реверс движения, установка в нулевое состояние регистра
Останов левой стороны, поворот колес в нейтраль с левого положения
Останов правой стороны, поворот колес в нейтраль с левого положения
Останов машины, поворот колес на угол + с , реверс движения, установка в нулевое состояние регистра
Останов правой стороны, поворот колес в нейтраль с правого положения
Останов левой стороны, поворот колес в нейтраль с правого положения
Останов машины, поворот колес на угол , реверс движения, установка в нулевое состояние регистра
ханизмом шарнирного параллелограмма В этом случае в автоматическом режиме работы машины исполнительные механизмы работают синхронно, обеспечивая поворот всех колес в одну сторону.
Для обеспечения высокой маневренности машины в режиме ручного управления следует предусматривать возможность как синхронного поворота всех колес - для диагонального дви71
жения, так и возможность поворота колес одной оси в противоположную сторону по отношению к колесам другой оси - для движения по кривой малого радиуса. Кроме того, не следует исключать возможность поворота колес только одной оси - для движения по кривой большого радиуса.
Предлагаемая машина проста в квн- структивном отношении, так как включает четыре идентичных мотор-редуктора, раму и два идентичных исполнительных механизма поворота колес. Система управления может быть выпол472438
йена на 12 микросхемах средней степени интеграции. В качестве датчиков могут быть применены бесконтактные конечные выключатели, например типа 5 КВД-6М.
При использовании предлагаемой машины благодаря исключению в конце каждого хода сложных маневрирова-ч НИИ, связанных с поворотом Всей ма- 10 шины, достигается повьшение производительности шлифования, а благодаря перекрешрванию следов обработки с постоянным углом достигается повышение качества обработанной поверх-ности пола.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 1996 |
|
RU2170497C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2226326C2 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| Устройство управления исполнительным органом путевой машины | 1974 |
|
SU523972A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЧВООБРАБАТЫВАЮЩИМ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2090992C1 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2086084C1 |
28
27
X
,-I « 7
15
18 16
1247243
5N,
-X-)O
V X.
фиг. V
ut 5
JJ
У cm, „б
2)Л(2
Pezucmp храненир
f f f f
Деши ратор
$, деши -ррато}. I
т
f f f f yy
W (t f f f
Упра8лен(/е при пря-Управление при
MOM Шжении обратном ffdu (поперечном)
Редактор . Недолуженко
Составитель Н. Ермакова
Техред-О.Сопко Корректор Г. Решетник
Заказ 4061/17 Тираж 740 .Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
блок domm/Kof
N f f f f f f
GflOK
Hai/альнш условий
2)Л(2СЖ|
f
ЛИ
-1
CvemvuK npO}fodoS
f N f f
гК
Останов
ОЗиг.б
| 1971 |
|
SU410923A1 | |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Машина для шлифования мозаичныхпОлОВ | 1979 |
|
SU841921A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
