Изобретение относится к лечебной гимнастике, преимущественно к устройствам для механотерапии, и может быть использовано в стационарных лечебных учреждениях и мобильных амбулаториях для восстановления опорно-двигательного аппарата больных или раненых.
Известен аппарат для механотерапии, содержащий корпус и подвижный держатель сустава с противовесом 1.
Недостатком аппарата является то, что на нем можно осуществлять только активные движения сустава посредством мышечной силы больного.
Известен аппарат для механотерапии, содержащий корпус и подвижный держатель дистального плеча сустава с противовесом 2.
Недостатком аппарата является невозможность осуществления активных и пассивных движений сустава с регулируемой амплитудой колебаний.
Цель изобретения - расширение функциональных возможностей путем обеспечения как активных, так и пассивных движений сустава с регулируемой амплитудой колебаний.
Поставленная цель достигается тем, что аппарат для механотерапии, содержащий корпус с подвижным держателем дистального плеча сустава с противовесом, снабжен электроприводом с втулкой, выполненной с Т-образным пазом и обращенной П-образной рамкой, ползунком с осью, составной регулируемой тягой, рычагом с пазом, платой с коромыслом и секторной зубчатой рейкой, причем электропривод закреплен на плате, установленной в корпусе с возможностью перемещения по вертикали, составная регулирующая тяга одним концом соединена с соью ползунка, другим - с рычагом, последний связан с подвижным держателем, а ползунок установлен в Т-образном пазу втулки и посредством планки и резьбовой щпильки со звездочкой соединен с П-образной рамкой.
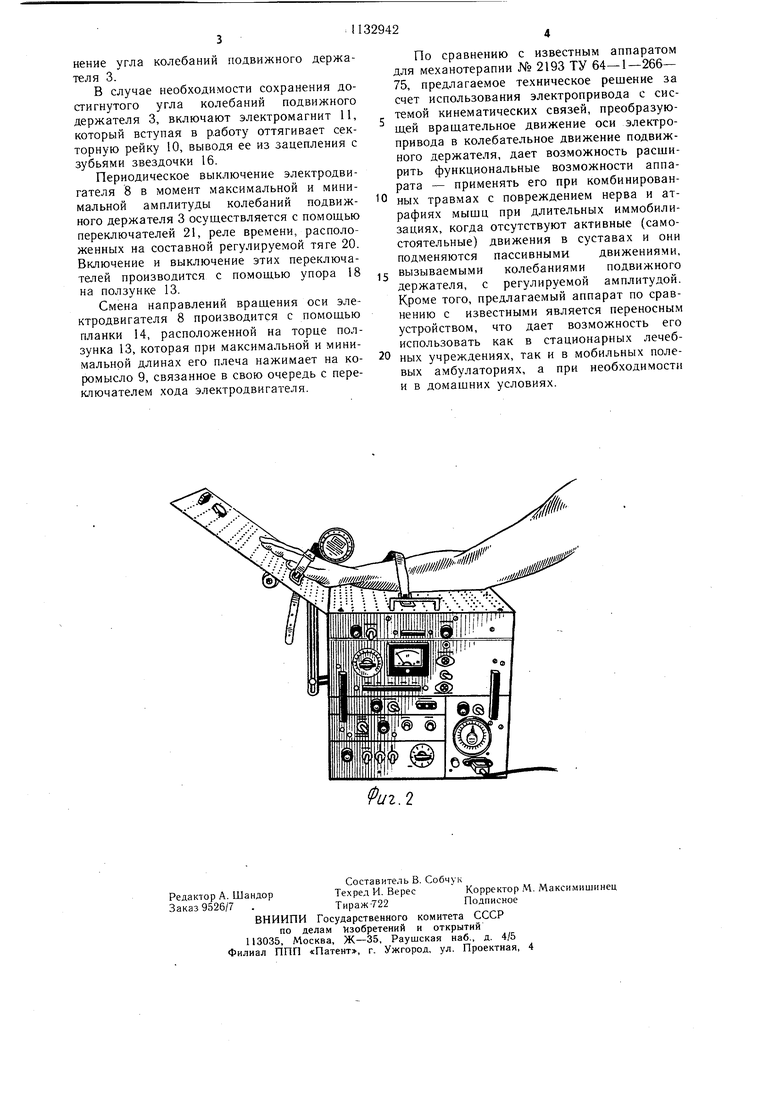
На фиг. 1 изображен аппарат, аксонометрия; на фиг. 2 - то же, в рабочем положении.
Аппарат для механотерапии включает коробчатый корпус 1, являющийся станиной с неподвижным держателем 2 проксимального плеча сустава, который жестко закреплен на крышке корпуса. Неподвижный держатель 2 шарнирно связан с подвижным держателем 3 для дистального плеча сустава. На подвижном держателе 3 закреплен регулируемый противовес 4 с циферблатным угломером 5. Между крыщкой корпуса 1 и его основанием жестко закреплена стойка 6, на которой смонтирована с возможностью вертикального перемещения плата 7 с установленным на ней электроприводом 8, например, асинхронным реверсивным электродвигателем со встроенным редуктором. На плате 7 установлено коромысло 9 для переключения хода электродвигателя 8, а также секторная зубчатая рейка 10, связанная с электромагнитом 11. На оси электродвигателя 8 закреплена втулка 12 с Т-образным поперечным пазом, в который помещен перемещающийся в нем ползунок 13, на торце которого смонтирована планка 14 с резьбовой щпилькой 15, на конце которой установлена звездочка 16. Этот конец щпильки 15 закреплен в П-образной рамке 17, установленной на втулке 12. На другом конце ползунка 13 имеется упор 18 и ось 19, на которой закреплена составная регулируемая по длине с помощью продольного паза тяга 20. На тяге 20 смонтирована планка с переключателями 21 реле времени (не показано). Тяга 20 соединена с рычагом 22, который с помощью проушины 23 связан с подвижным держателем 3. Для регулировки угла наклона рычага 22 проушина 23 имеет секторную прорезь, а рычаг снабжен винтом 24.
Аппарат работает следующим образом.
Перед началом сеанса механотерапии на неподвижном держателе 2 с помощью ремней закрепляют проксимальное плечо сустава конечности больного, а на подвижном держателе 3 - его дистальное плечо (фиг. 2). С помощью циферблатного угломера 5 предварительно определяют степень подвижности сустава больного. В соответствии с этим далее определяют необходимую степень воздействия на сустав.
После установки с помощью рычага 22 и проушины 23 заданного угла наклона подвижного держателя 3 (контролируется по угломеру 5) включают электродвигатель 8, который начинает вращать втулку 12, расположенную на его оси, вместе с ползунком 13. Вместе со втулкой и ползунком приводится во вращение П-образная рамка 17 с закрепленной на ней резьбовой щпилькой 15 со звездочкой 16. Последняя в свою очередь, входя в зацепление с зубьями секторной рейки 10, приводит во вращение резьбовую шпильку 14, которая через планку 14 на ползунке 13 вызывает его перемещение по Т-образному пазу во втулке 12. Перемепдаясь по этому пазу ползунок 13, в зависимости от направления вращения оси электродвигателя 8, изменяет свое плечо по отношению к этой оси, которое преобразует вращательное движение ползунка 13 в возвратно-поступательное движение составной регулируемой тяги 20. Эта тяга передает усилие на рычаг 22, который в свою очередь приводит в колебательное движение подвижный держатель 3. Изменение плеча ползунка 13 с помощью звездочки 16 и зубчатой секторной рейки 10 вызывает изменение угла колебаний подвижного держателя 3.
В случае необходимости сохранения достигнутого угла колебаний подвижного держателя 3, включают электромагнит 11, который вступая в р.аботу оттягивает секторную рейку 10, выводя ее из зацепления с зубьями звездочки 16.
Периодическое выключение электродвигателя 8 в момент максимальной и минимальной амплитуды колебаний подвижного держателя 3 осуществляется с помощью переключателей 21, реле времени, расположенных на составной регулируемой тяге 20. Включение и выключение этих переключателей производится с помощью упора 18 на ползунке 13.
Смена направлений вращения оси электродвигателя 8 производится с помощью планки 14, расположенной на торце ползунка 13, которая при максимальной и минимальной длинах его плеча нажимает на коромысло 9, связанное в свою очередь с переключателем хода электродвигателя.
По сравнению с известным аппаратом для механотерапии № 2193 ТУ 64-1-266- 75, предлагаемое техническое решение за счет использования электропривода с системой кинематических связей, преобразующей вращательное движение оси электропривода в колебательное движение подвижного держателя, дает возможность расщирить функциональные возможности аппарата - применять его при комбинированных травмах с повреждением нерва и атрафиях мыщц при длительных иммобилизациях, когда отсутствуют активные (самостоятельные) движения в суставах и они подменяются пассивными движениями, вызываемыми колебаниями подвижного держателя, с регулируемой амплитудой. Кроме того, предлагаемый аппарат по сравнению с известными является переносным устройством, что дает возможность его использовать как в стационарных лечебных учреждениях, так и в мобильных полевых амбулаториях, а при необходимости и в домащних условиях.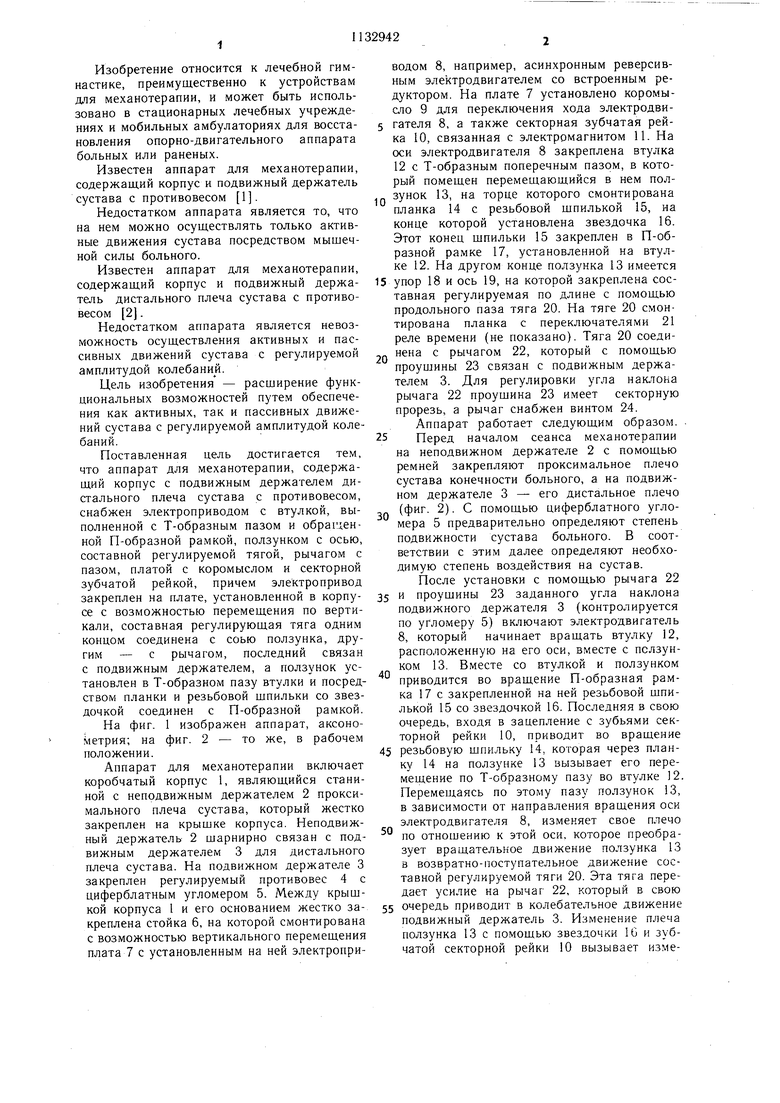
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ И ЭЛЕКТРИЧЕСКИМ ИСПОЛНИТЕЛЬНЫМ УЗЛОМ УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ | 2010 |
|
RU2555112C2 |
| Предохранительное устройство для круглопильного станка | 1981 |
|
SU1046091A2 |
| Предохранительное устройство для круглопильного станка | 1982 |
|
SU1036530A1 |
| Предохранительное устройство для круглопильного станка | 1980 |
|
SU980980A1 |
| УСТРОЙСТВО ДЛЯ АКТИВНО-ПАССИВНОЙ РАЗРАБОТКИ ПЛЕЧЕВОГО СУСТАВА | 1990 |
|
RU2029535C1 |
| Регулятор прядения к кольцевым ватерам для слойного и базового регулирования скорости | 1940 |
|
SU61451A1 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ "ПРОНЬ-3" | 1995 |
|
RU2085144C1 |
| Подпрессовщик брикетного пресса | 1987 |
|
SU1500507A1 |
| Устройство для разработки плечевого сустава | 1980 |
|
SU923543A1 |
| УСТРОЙСТВО для ПОДАЧИ ПЛЕНКИ К ТРАНСПОРТИРУЮЩЕМУ МЕХАНИЗМУ КИНОАППАРАТА | 1973 |
|
SU372850A1 |
АППАРАТ ДЛЯ МЕХАНОТЕРАПИИ, содержащий корпус и подвижный держатель, дистального плеча сустава с противовесом, отличающийся тем, что, с целью расширения его функциональных возможностей путем обеспечения как активных, так и пассивных движений сустава с регулируемой амплитудой колебаний, он снабжен электроприводом с втулкой, выполненной с Т-образным пазом и оснащенной П-образной рамкой, ползунком с осью, составной регулируемой тягой, рычагом с пазом, платой с коромыслом и секторной зубчатой рейкой, причем электропривод закреплен на плате, установленной в корпусе с возможностью перемещения по вертикали, составная регулирующая тяга одним концом соединена с осью ползунка, другим - с рычагом, последний связан с подвижным держателем, а ползунок установлен в Т-образном пазу втулки и посредством i планки и резьбовой щпильки со звездочкой соединен с П-образной рамкой. (Л со N0 СО 4 to
Фиг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Руководство по кинезитерапии | |||
| София, «Медицина и физкультура, 1978, с | |||
| Способ прикрепления барашков к рогулькам мокрых ватеров | 1922 |
|
SU174A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
