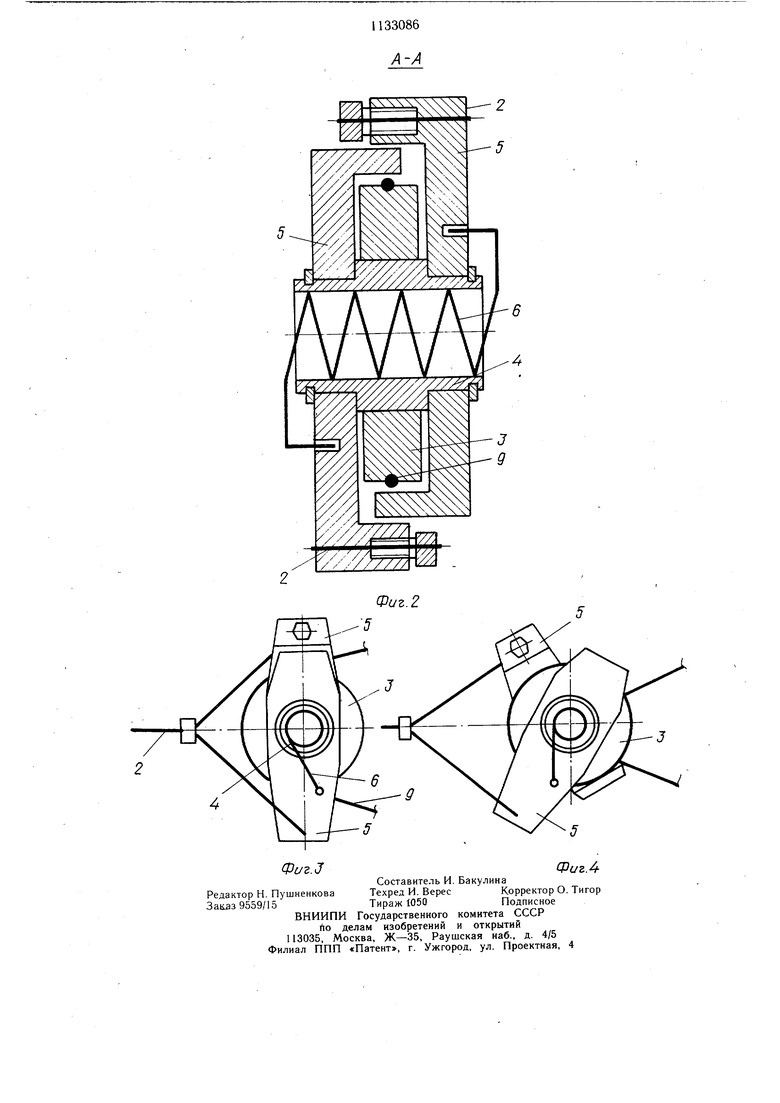
Изобретение относится к устройствам для манипулирования различными предметами и может найти применение в промышленности, научных исследованиях и медицине. По основному авт. св. № 910410 известен захват манипулятора, содержащий сочлененные с ладонью и связанные с приводом пальцы, собранные из звеньев, кроме того, захват снабжен тросом и пружинящим элементом в виде пластин, причем пальцы соединены с тросом посредством блока, а на пружинящих элементах установлены фасонные поверхности с отверстиями, через которые проходит трос. Недостатком данного захвата является то, что при захвате предмета, расположенного не по центру зоны захвата, невозможно его надежное удержание, так как при различном изгибе пружинящих элементов на них возникают различные усилия, которые стремятся уравновеситься за счет обкатывания троса вокруг блока при взятии предмета. После этого пружинящие элементы примут форму с одинаковым изгибом, что снижает надежность захвата, а захваченный предмет теряет свою первоначальную ориентацию. Целью изобретения является повышение надежности захвата. Поставленная цель достигается тем, что захват манипулятора снабжен пружиной скручивания и двумя прижимами, выполненными в виде двуплечих рычагов, установленных с двух сторон на оси блока, при этом ось блока выполнена полой и в ее полости расположена пружина скручивания, причем одно из плеч каждого рычага соединено с тягой привода, а другое - с концами пружины скручивания. На фиг. 1 показано устройство захвата манипулятора; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - положение прижимов до захвата предмета; на фиг. 4 - положение прижимов после захвата предметов. Захват манипулятора состоит из корпуса 1, тяги 2, блока 3, размещенного на оси 4, выполненной полой. Прижимы 5 выполнены в виде двуплечих рычагов, установленных с двух сторон на оси 4 блока 3, причем в полости оси 4 расположена пружина 6 скручивания, при этом одно из плеч каждого рычага 5 соединено с тягой 2 привода, а другое - с концами пружины 6 скручивания. Пальцы 7 установлены на плоских пружинах 8, закрепленных на корпусе 1. Причем пальцы 7 выполнены фасонными из упругого материала, например резины. Тросик 9 пропущен через блок 3 и отверстия, выполненные в фасонных поверхностях пальцев 7. Жесткость пружины 6 скручивания выбирается большей, чем усилие зажима предмета. Захват манипулятора работает следующим образом. При отсутствии натяжения тяги 2 пружины 8 занимают исходное положение. Прижимы 5 разведены пружиной б скручивания. При приложении усилия к тяге 2 тросик 9 натягивается, преодолевая сопротивление пружин 8. Это приводит к захвату пред.мета. Если предмет расположен в зоне захвата не по центру и не может сдвигаться в сторону, то одна плоская пружина 8, несущая пальцы 7 захвата, войдя в сопротивление с ним, останавливается, а другая плоская пружина 8, несущая пальцы 7. благодаря тому, что тросик 9 перекинут через блок 3, продолжает изгибаться до упора с предметом. Однако тяга 2, продолжая двигаться, поворачивает прижимы 5 вокруг полой оси 4, преодолевая сопротивление пружины 6 скручивания. Пружины 5 свои.ми выступами прижимают тросик 9 к поверхности блока 3, обеспечивая его неподвижность. Теперь при переносе предмета пружины 8 не могут уравнять свои усилия, а значит и ослабить захват так как отсутствует возможность обкатки тросика 9 вокруг блока 3. При отпускании предмета ослабляется усилие на тяге 2, пружина б скручивания разводит прижимы 5, и своим усилием пружины 8 расходятся. Предложенная конструкция позволит повысить надежность захвата предметов.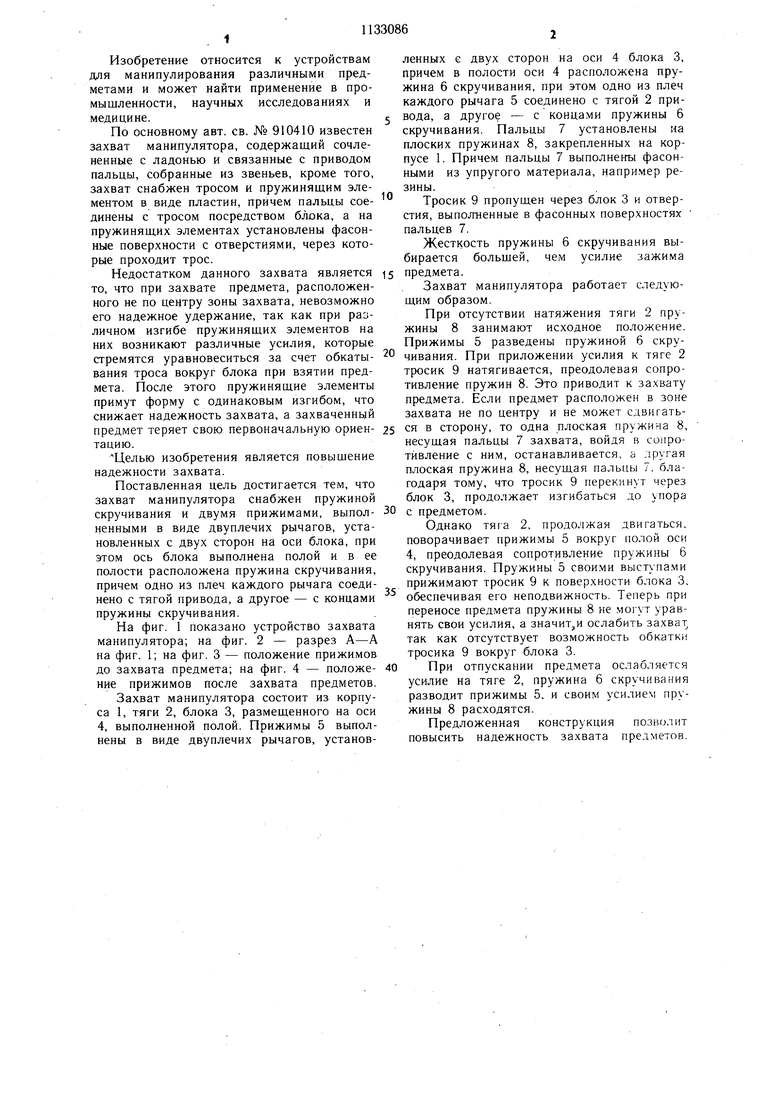
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1979 |
|
SU910410A2 |
| ИСКУССТВЕННЫЙ ПАЛЕЦ | 2014 |
|
RU2667624C2 |
| Затравка для установок непрерывной разливки металлов | 1976 |
|
SU655467A1 |
| Замок для стропа | 1979 |
|
SU816927A1 |
| Захват манипулятора | 1984 |
|
SU1237425A1 |
| Устройство для перемещения и подачи животного на обработку | 1988 |
|
SU1648303A1 |
| Контейнер для транспортировки сыпучих материалов | 1981 |
|
SU1034961A1 |
| Стыковочное устройство | 1984 |
|
SU1202877A1 |
| Распределительное приспособление к транспортеру, сортирующему бревна по толщине | 1933 |
|
SU34385A1 |
| ВСЕСОК^с? | 1973 |
|
SU368126A1 |
ЗАХВАТ МАНИПУЛЯТОРА по авт. св. № 910410, отличающийся тем, что, с целью повышения надежности, он снабжен пружиной скручивания и двумя прижимами, выполненными в виде двуплечих рычагов, установленны.х с двух сторон на оси блока, при этом ось блока выполнена полой и в ее полости расположена пружина скручивания, причем одно из плеч каждого рычага соединено с тягой привода, а другие - с концами пружины скручивания. (Л с: со оо о ОС о: Ф(/г.7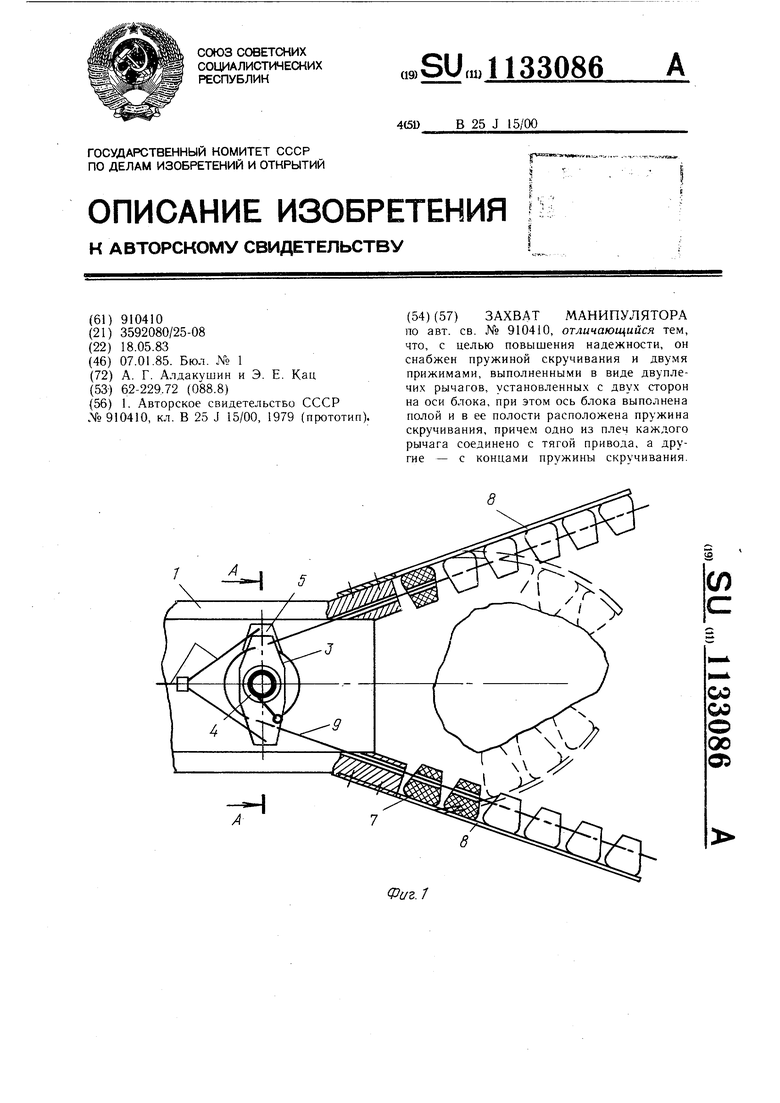
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1979 |
|
SU910410A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
