(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1983 |
|
SU1133086A2 |
| Захват манипулятора | 1984 |
|
SU1237425A1 |
| Захват манипулятора | 1985 |
|
SU1288057A1 |
| ИСКУССТВЕННЫЙ ПАЛЕЦ | 2014 |
|
RU2667624C2 |
| Захват манипулятора | 1982 |
|
SU1066800A2 |
| ЗАХВАТ | 2014 |
|
RU2570597C1 |
| Схват манипулятора | 1981 |
|
SU992181A2 |
| Рука манипулятора | 1987 |
|
SU1450995A1 |
| Захват манипулятора | 1982 |
|
SU1034897A2 |
| РОЛЛЕР | 1991 |
|
RU2016807C1 |
I
Изобретение относится к устройствам для манипулирования различными предметами и может найти применение в промышл1енности, научных исследованиях и медищше.
По основному авт. св. № 724337 известен захват манипулятора, содержащий сочлененные с ладонью и связанные с приводом пальцы, собранные из звеньев, кроме того захват снабжен тросом и пружинящим элементом, звенья пальцев выполнены с фасонными поверхностями, направляющими и отверстиями и )гстаиовлены на пружинящем элементе с возможностью перемещения вдоль него, причем трос соединяет пальцы с приводом и проходит через отверстия в звеньях, смещенные относительно геометрического центра звеньев в сторону, противоположную их направляющим 1..
Недостатки зтого захвата заключаются в том, что зона захвата ограничена кинематикой пальцев, в случае, если предмет расположеи не по центру зоны захвата н не может, сдвигаться в сторону, то захват затруднен.
Целью изобретения является создание захвата манипулятора, позволяющего улучщить захват предметов раэпичной конфигурации, расположенных в произвольных точках в зоне захвата. Это достигается тем, что трос соединяет пальцы с приводом посредстве дотюлнительно введенного и расположенного на приводе блока, а пружннящий злемент выполнен в виде пластин.
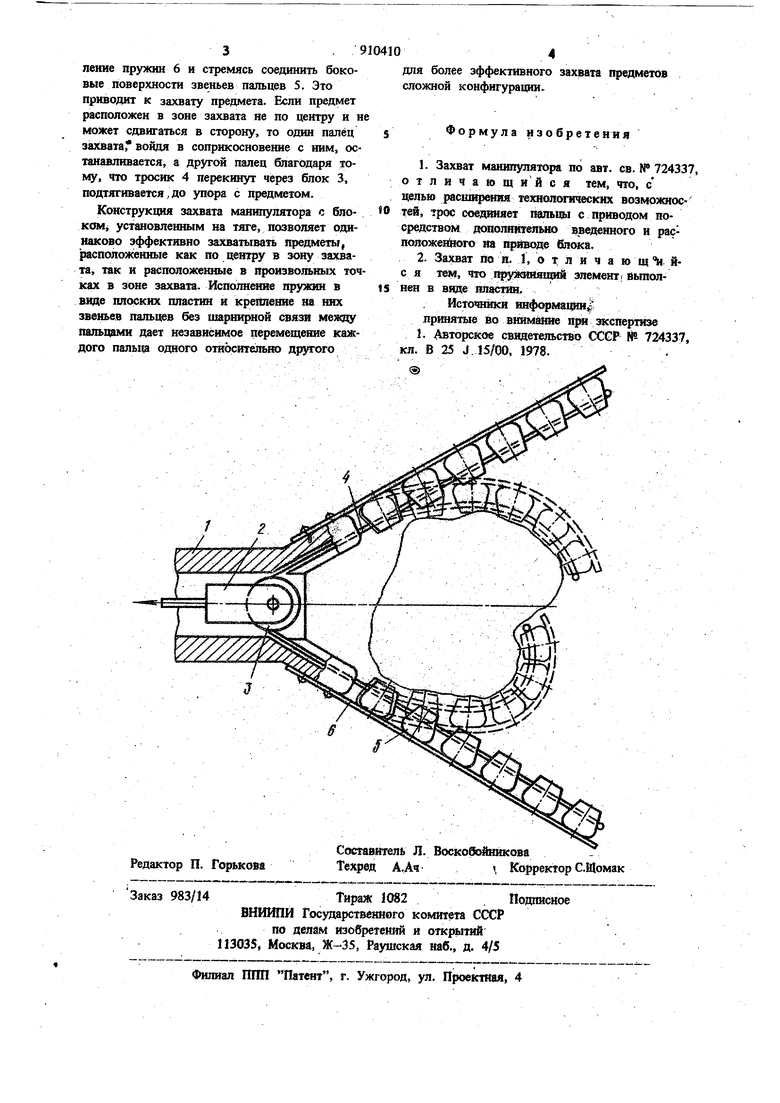
На чертеже показано устройство захвата
10 манипулятора.
Захват манипулятора состоит из корпуса 1, тяги 2, блока 3, тросика 4, прощ щеиного через блок, и большего количества пальцев 5, которые закреплены на пружинящем элементе - плоских пружинах 6. Пружины 6 служат для разжимания пальцев при ослаблении натяжения тросика 4.
Захват манипулятора работает следующим образом./,
20
При отсутствии натяжения тяги 2 пружюо 6 занимают первоначально заданное им положеиие. При приложении усилия к тяге 2 тросик 4 Натягивается, преодолевая сопротив-.
