Изобретение относится к машиностроению, а именно к технике манипулирования изделиями, и может найти применение при механизации и автоматизации технологических процессов обработки и сборки.
Целью изобретения является расширение технологических возможностей захвата манипулятора путем обеспечения захватывания деталей сложно.й формы, например, типа тора, а также повышение надежности устройства за сче переменной жесткости пальцев.
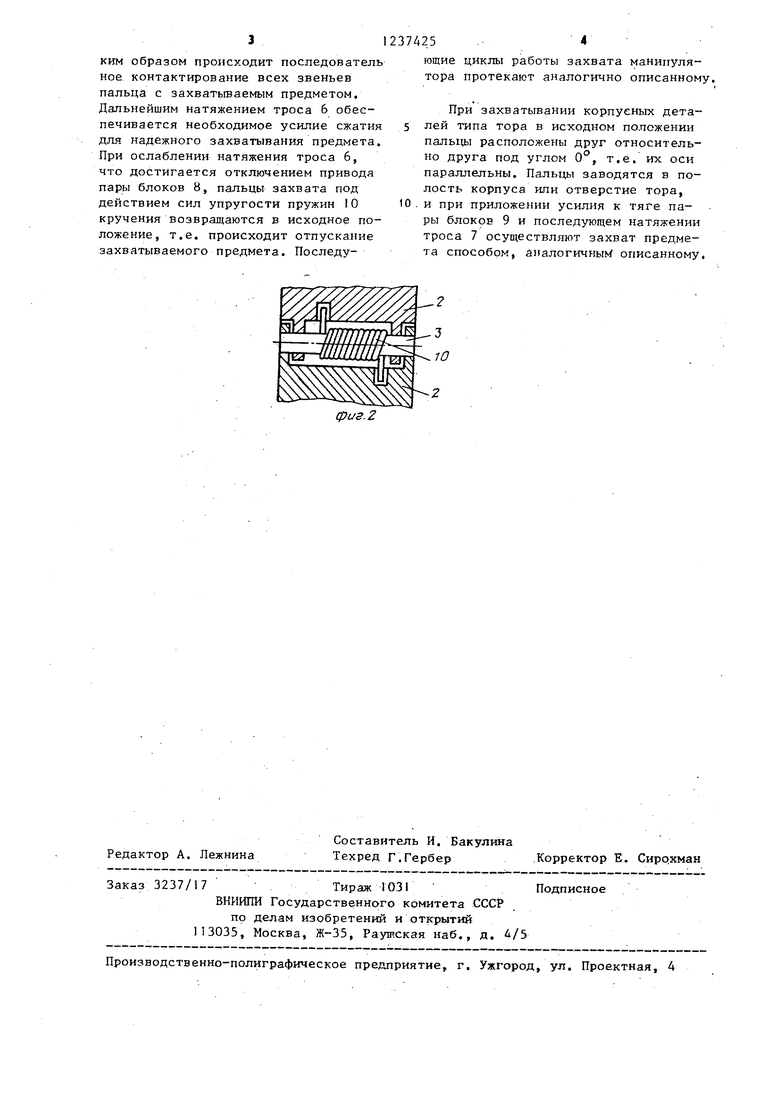
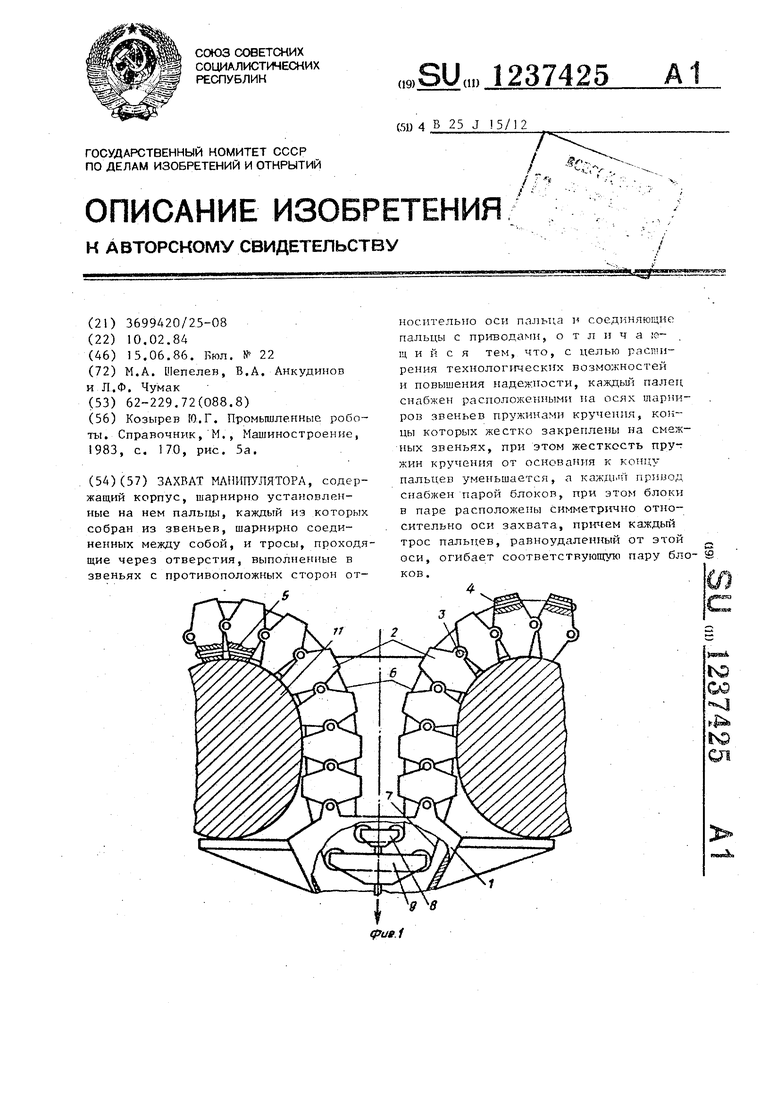
На фиг. I изображен захват манипулятора, общий вид; на фиг. 2 - сечение по оси шарнира.
Захват манипулятора состоит из . корпуса 1, пальцев, собранных из звеньев 2, соединенных друг с другом и с корпусом 1 посредством шарниров 3. В звеньях 2 вьшолнены основные 4 и дополнительные 5 отверстия, сквозь которые пропущены основной 6 и дополнительный 7 тросы, охватывающие соответственно пары блоков 8 и 9, которые установлены на тягах при- водов (не показаны). На осях шарниров 3 установлены пружины 10 кручения, концы которых жестко закреплены в корпусах смежных звеньев 2, при этом наибольший крутящий момент, на- чиная от пружины, размещенной на оси шарнира, соединяющего палец с корпусом 1, определяется по выражению
м; м„ ам,р-1,
Где Mj - наибольший рабочий крутящий Момент i-ой пружины; М - наибольший рабочий крутящий момент пружины круче- ния, установленной на оси шарнира, соединяющего палец с корпусом;
М.
- момент трения в шарнире;
а . - коэффициент пропорционапьности (а 3-50); i - порядковый номер шарнира
(i 1,2 ...).
Захват манипулятора работает следующим образом.
т 1,
При приложении усилия к тяге пары блоков 8 натягивается основной трос 6, который, преодолевая сопротивление . пружин 10 кручения, приводит к сближению пальцы захвата манипулятора. Сближение начинается из исходного положения, при котором ос пальцев прямолинейны и расположены
друг относительно друга под углом 180 , и осуществляется путем поворота пальцев вокруг шарниров 3, соединяющих их с корпусом 1. При этом из- 5 гиба осей пальцев не происходит, так как моменты кручения пружин, установленных на осях шарниров, соединяющих пальцы с корпусом, меньше момента кручения пр.ужин на осях других
О шарниров на вел1-гчииу М аМгр i« Ос;и пальцев остаются прямолинейными до момергта касания ОДНРГМ ипи несколькими звеньями 2 поверхности захватываемого предмета. Дальнейшим натяги5 ванием тяги пары блоков . 8 создается Необходимое усилие для преодоления моментов кручения пружин 10, установленных на осях шарниров 3, которое приводит к изгибу осей пальцев в
0 сторону захватываемого предмета. В случае, если один из пальцев коснулся предмета раньше другого, что происходит в результате несимметричности захватываемого предмета или
5 его расположения не по центру зоны захватывания, палец, вошедший в соприкосновение с предметом, останавливается, а другой палец благодаря проворачиванию пары блоков 8 довора0 чивается до упора с предметом.
Дальнейшую работу захвата .манипулятора рассмотрим на примере работа одИого из пальцев, действие которых происходит аналогичным образом. После контактирования одного, из нескольких звеньев пальца с захватыва- предметом движение пальца про- ргсходит вокруг шарнира, соединяющего наиболее удаленное от корпуса звено из контактирующих в данный момент времени с предметом звеньев, если таких звеньев несколько, и звено, которое еще не вошло в контакт с предметом. Например, если при повороте Псяльца первым соприкоснулось с захва- TbinaeNfbiM предметом третье звено, то последующее движение пальца, осуществляемое вследствие дальнейшего натяжения троса 6, происходит вокруг шарнира, соединяющего .третье и четвертое звенья, так как в данный период времени момент кручения пружины, установленной на оси указанного шарнира, является наименьшим. Следовательно, при контакте с предметом 1-го звена дальнейший поворот пальца осуществляется вокруг шарнира, соединяющего i-e и i+1-e звенья. Та0
5
0
5
КИМ образом происходит последователь ное контактирование всех звеньев пальца с захватьгоаемым предметом. Дальнейшим натяжением троса 6 обеспечивается необходимое усилие сжатия для надежного захватывания предмета. При ослаблении натяжения троса 6, что достигается отключением привода пары блоков 8, пальцы захвата под действием сил упругости пружин 10 кручения возврап1аются в исходное положение, т.е. происходит отпускание захватываемого предмета. Последу37425 -
ющие циклы работы захвата манипулятора протекают аналогично описанному.
При захватывании корпусных дета- 5 лей типа тора в исходном положении пальцы расположены друг относительно друга под углом О, т.е. их оси параллельны. Пальцы заводятся в полость корпуса или отверстие тора, 10 . и при приложении усилия к тяге пары блоков 9 и последующем натяжении троса 7 осуществляют захват предмета способом, аналогичныг описанному.
фиг. 2
Редактор А. Лежнина
Составитель И. Бакулина Техред Г.Гербер
Заказ 3237/17ТиражГОЗГ Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. /5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Е. Сиро.хман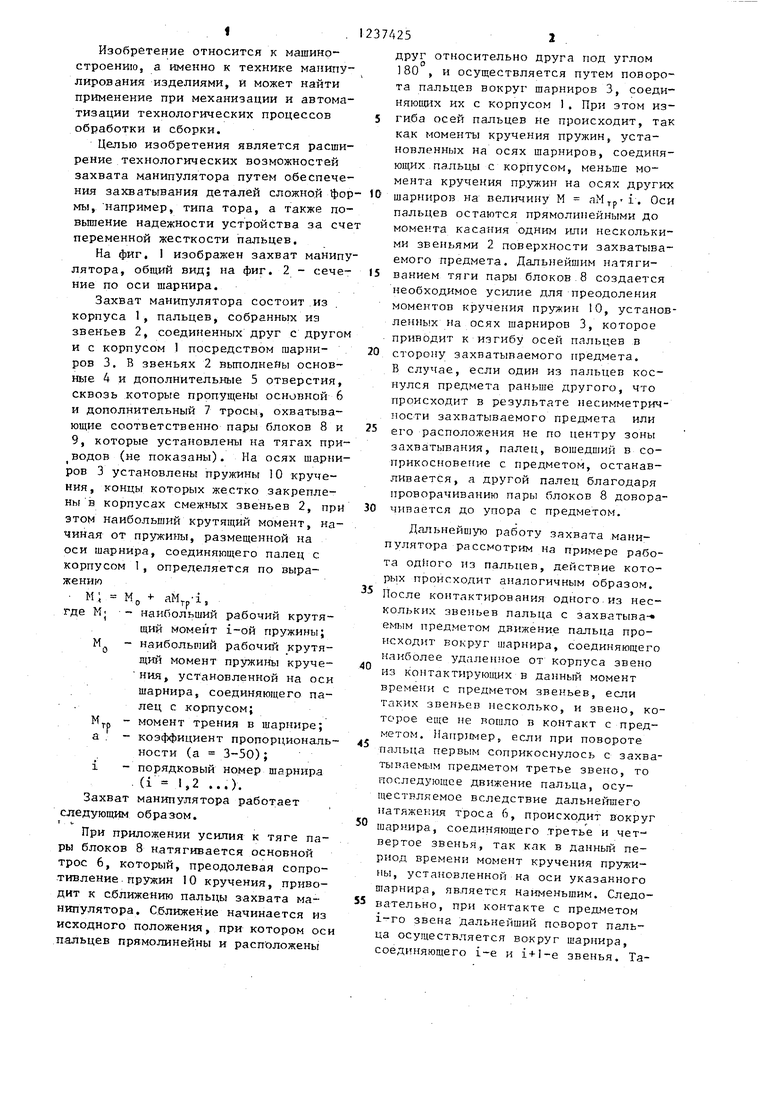
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ | 2014 |
|
RU2570597C1 |
| Захватное устройство | 1985 |
|
SU1298074A1 |
| УНИВЕРСАЛЬНЫЙ ВСЕНАПРАВЛЕННЫЙ ПАЛЕЦ ЗАХВАТНОГО УСТРОЙСТВА | 2022 |
|
RU2804563C1 |
| Манипулятор | 1985 |
|
SU1663034A1 |
| Схват промышленного робота | 1987 |
|
SU1407801A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| ИСКУССТВЕННЫЙ ПАЛЕЦ | 2014 |
|
RU2667624C2 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| ПАЛЕЦ ТЯГОВОГО ПРОТЕЗА И УСТРОЙСТВО ПРОТЕЗА КИСТИ И ПРОТЕЗА ПРЕДПЛЕЧЬЯ С ТАКИМИ ПАЛЬЦАМИ | 2020 |
|
RU2759777C1 |
| Козырев Ю.Г | |||
| Промьпиленные роботы | |||
| Справочник, М., Машиностроение, 1983, с | |||
| Аппарат для передачи фотографических изображений на расстояние | 1920 |
|
SU170A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
