I .
Изобретение относится к машиностроению и может быть использовано, например, в манипуляторах, роботах для захвата сменного инструмента.
Цель изобретения - расширение технологических возможностей путем обеспечения подвода различных энергоносителей .к схвату и упрощение конструкции стыковочных элементов.
На фиг, 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1 (перед фиксацией схвата); на фиг. 4 - разрез Б-Б на фиг. 1 (после фиксации схвата).
Стыковочное устройство содержит фланец 1, закрепленный на руке 2 манипулятора, поворотный стыковочный блок 3, установленный на оси 4. Во фланце 1 находится фиксатор 5, подпружиненный, относительно корпуса 1 пружиной 6, и миеются выступы q с наклон и 1ми пазами S . На стыковочном блоке 3 выполнены соответственно фиксатору два отверстия S иг. Стыковочное устройство имеет штуцера 7 для подвода к захвату знергоно- лителей например, сжатого воздуха,
12028772
ном положении вертикального перемещения фланца 1 стыковочный блок 3 сцент рирован относительно схвата 12, фиксатор 5 выведен из отверстия .
5 Наклонные пазы на выступах фланца 1 установлены напротив штифтов 13 а электроразъем 11 соединен с разъемом 12. Рука 2 поворачивает на заданньй угол,фланец 1 с осью 4
10 относительно зафиксированного на схва те 12 стыковочного блока 3, при этом наклонные пазы 8 взаимодействуют с штифтами 13 и прижимают схват 12 к стыковочному блоку 3. Упругий элемент
15 9 деформируется, Компенсирует погрешности и обеспечивает возможность пово рота фланца 1 на заданный угол. Уп-г лотнение 10, прижимаясь к схвату 12, герметизирует стык. В конце поворота
20 фиксатор 5 упирается в упор 26, причем во время поворота выступы а фланца 1 поворачивают рычаги 16 и 17 вокруг осей 18 и 19 (фиг. 4), пружины 20 и 21 прижимают рычаги 16 и
25 17 к штифтам .22 и 24. Рука 2 поднимает стыковочное устройство вместе с зажатым схватом 12. Под действием пружины 6 фиксатор 5 входит в отверстие В и предохраняет стыковочньй
пальцы 8, а на торцовой поверхности
стьнсовочного блока 3 установлен упру- д блок 3 от поворота относительно гий компенсирующий элемент 9. Каждая . . фланца 1. магистраль с энергоносителем имеет для отсоединения схвата 12 рука 2 уплотнение 10, злектроразьем .11 слу- манипулятора устанавливает стыковоч- жит для подвода электроэнергии к схва- ное устройство над кассетой 14 и ту. Схват 12, имеющий выступы, напри- упускает его, в результате схват 12 мер штифты 13, установлен в кассеты устанавливается на пальцы 15, фикса- 14 на пальцах 15, Кассета 14 снабжена тор 5 упирается в упор 26, корпус 1, двуплечими рычагами 16 и 17, установленными на осях 18 и 19, причем рычаги 16 и 17, подпружиненные пружинами
20 и 21, могут занимать два фиксированных положения, ограниченных штифтами 22 и 23, 24 и 25 соответственно.
На кассете 14 установлены соответственно отве1)стиям ь и г стыковоч - ного устройства упоры 26 и 27. В исходном положении фиксатор 5 находится в отверстии 2 и предохраняет стыко вочный блок 3 от проворота относительно фланца 1,
Стьосовочное устройство работает следующим образом.
Рука 2 манипулятора опускает стыковочное устройство на схват 12, паль40
15
50
перемещаясь относительно неподвижного фиксатора 5, сжимает пружину 6. В конечном положении вертикального перемещения фиксатор 5 вьшеден из отверстия В . Рука 2 поворачивает на заданный угол фланец 1 с осью 4 относительно зафиксированного на схвате 12 стыковочного блока 3. Во время поворота выступы а фланца 1 поворачивают рычаги 16 и 17, пружины 20 и 21 прижимают рычаги 16 и 17 к штифтам 23 и 24 (фиг. 3). В конце поворота штифты 13 введены из пазов о , фиксатор 5 упирается в упор 27. Рука 2 поднимает стыковочное устройство, причем рьтаги 16 и 17 предотвращают вертикальное перемещение схвата 12. Под действием
цы 8 базируют стыковочное устройство
ртноснтельно схвата 12, а фиксатор 5пружины 6 фиксатор 5 вводится в от5 упирается в упор 27, Фланец 1, дви-верстие t и предохраняет стыковочгаясь относительно неподвижного фикса-ный блок 3 от смешения относительтора 5, сжимает пружину 6, В конеч-но фланца 1.
2028772
ном положении вертикального перемещения фланца 1 стыковочный блок 3 сцентрирован относительно схвата 12, фиксатор 5 выведен из отверстия .
5 Наклонные пазы на выступах фланца 1 установлены напротив штифтов 13, а электроразъем 11 соединен с разъемом 12. Рука 2 поворачивает на заданньй угол,фланец 1 с осью 4
10 относительно зафиксированного на схва- те 12 стыковочного блока 3, при этом наклонные пазы 8 взаимодействуют с штифтами 13 и прижимают схват 12 к . стыковочному блоку 3. Упругий элемент
15 9 деформируется, Компенсирует погрешности и обеспечивает возможность поворота фланца 1 на заданный угол. Уп-г лотнение 10, прижимаясь к схвату 12, герметизирует стык. В конце поворота
20 фиксатор 5 упирается в упор 26, причем во время поворота выступы а фланца 1 поворачивают рычаги 16 и 17 вокруг осей 18 и 19 (фиг. 4), пружины 20 и 21 прижимают рычаги 16 и
25 17 к штифтам .22 и 24. Рука 2 поднимает стыковочное устройство вместе с зажатым схватом 12. Под действием пружины 6 фиксатор 5 входит в отверстие В и предохраняет стыковочньй
блок 3 от поворота относительно фланца 1. для отсоединения схвата 12 рука 2 манипулятора устанавливает стыковоч- ное устройство над кассетой 14 и пускает его, в результате схват 12 устанавливается на пальцы 15, фикса- тор 5 упирается в упор 26, корпус 1,
перемещаясь относительно неподвижного фиксатора 5, сжимает пружину 6. В конечном положении вертикального перемещения фиксатор 5 вьшеден из отверстия В . Рука 2 поворачивает на заданный угол фланец 1 с осью 4 относительно зафиксированного на схвате 12 стыковочного блока 3. Во время поворота выступы а фланца 1 поворачивают рычаги 16 и 17, пружины 20 и 21 прижимают рычаги 16 и 17 к штифтам 23 и 24 (фиг. 3). В конце поворота штифты 13 введены из пазов о , фиксатор 5 упирается в упор 27. Рука 2 поднимает стыковочное устройство, причем рьтаги 16 и 17 предотвращают вертикальное перемещение схвата 12. Под действием
пружины 6 фиксатор 5 вводится в отВид А
f
ipuz.Z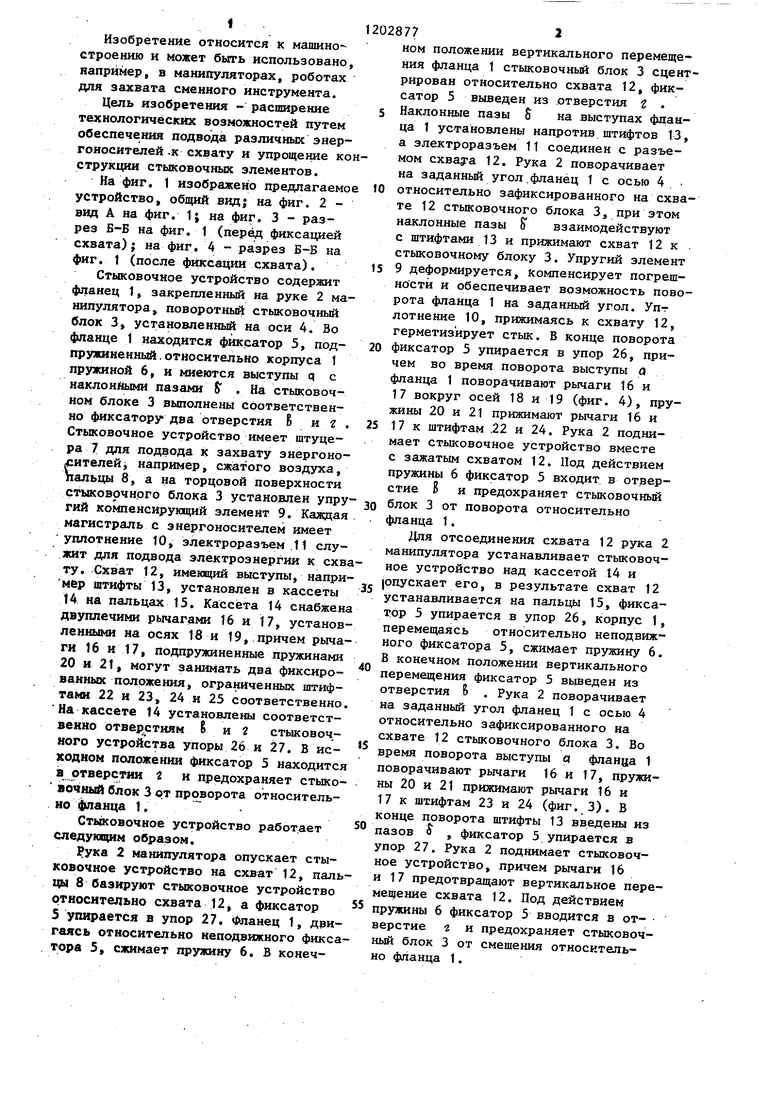
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортирования и перегрузки деталей из кассет | 1985 |
|
SU1364443A1 |
| Стыковочное устройство | 1986 |
|
SU1393631A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| Магнитный схват | 1986 |
|
SU1430283A1 |
| ШТАТИВ | 1997 |
|
RU2117339C1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Устройство для кассетирования плоских деталей | 1988 |
|
SU1618578A1 |
| Стыковочное устройство | 1988 |
|
SU1565682A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |


//
2
22
f7
Фиг, 3 fs
Б- Б
f6 22
Редактор Л. Гратилло
Составитель,,.С. Новик
Техред А.Бабинец Корректор И. Муска
Заказ 8367/20 Тираж 1049 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал гаШ Патент, г. Ужгород, ул. Проектная, 4
| Стыковочное устройство | 1975 |
|
SU543513A1 |
