1
(21)4481143/15
(22) 13.09.88
(46) 15.05.91. Бюл.№18
(71)Научно-производственное объединение Каракуль
(72)Р.Х.Зинатуллин, С.Ж.Жакыпбеков, Р.Р.Шталь. В.Т.Нагорный и В.А.Кульдин (53)619.615(088.8)
(56)Авторское свидетельство СССР М; 1329708,кл. А 01 К 29/00, 1987.
(54) УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ПОДАЧИ ЖИВОТНОГО НА ОБРАБОТКУ
(57)Изобретение относится к сельскому хозяйству. Цель изобретения - повышение эксплуатационной надежности устройства, Устройство для перемещения и подачи животного на обработку содержит средство для захвата животных, состоящее из рамы 1, на сторонах которой шарнирно закреплены с помощью скоб 2 захватные рычаги 3. Каждый захватный рычаг 3 состоит из секций 4, неподвижно закрепленных в обоймах 5, и поворотных секций 6, шарнирно связанных между собой и секциями 4 посредством пружин и пальцев. Поворотные секции 6 со стороны их шарнирных соединений имеют скосы, обеспечивающие поворот секций одна относительно другой на требуемый угол в направлении внутреннего пространства рамы 1. Захватные рычаги 3 соединены между собой посредством обойм 5 и крепящихся в них штанг, которые посредством тросовых подвесок 11 соединены с кареткой
| название | год | авторы | номер документа |
|---|---|---|---|
| Лесозаготовительная машина | 1982 |
|
SU1074448A1 |
| МОСТОВОЙ БЛОК МНОГОПРОЛЕТНОГО МОСТА И КАРЕТКА ПРИВОДА (ЕЕ ВАРИАНТЫ) | 1993 |
|
RU2057836C1 |
| Вираж беговой дорожки зала | 1990 |
|
SU1726706A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПОДАЧИ ТРОСОВОГО АНКЕРА И УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРОСОВОГО АНКЕРА | 2010 |
|
RU2527839C2 |
| МОСТОВОЙ БЛОК МНОГОПРОЛЕТНОГО МОСТА | 1992 |
|
RU2065515C1 |
| ТРЕНАЖЕР | 1991 |
|
RU2016599C1 |
| Вагон для пакетированных грузов | 1988 |
|
SU1684200A1 |
| Устройство для перемещения и кантования грузов | 1987 |
|
SU1421676A1 |
| Устройство для прополки приусадебных участков | 1989 |
|
SU1727546A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1970 |
|
SU258758A1 |
11
U
(Л
с
ON -N 00
оэ
О CJ
перемещения и сблокированы между собой пружиной 12. Через отверстия секций 6 и 4 каждого захватного рычага 3 пропущены приводные тросы, один конец каждого из которых прикреплен к крайним нижним поворотным секциям б, а второй выведен через блоки на барабаны 15 и закреплен винтом. Поворотные секции 6 подпружинены листовыми пружинами. Барабаны 15 усИзобретение относится к сельскому хозяйству, в частности к устройствам для перемещений и подачи животных на обработку.
Цель изобретения - повышение эксплуатационной надежности устройства.
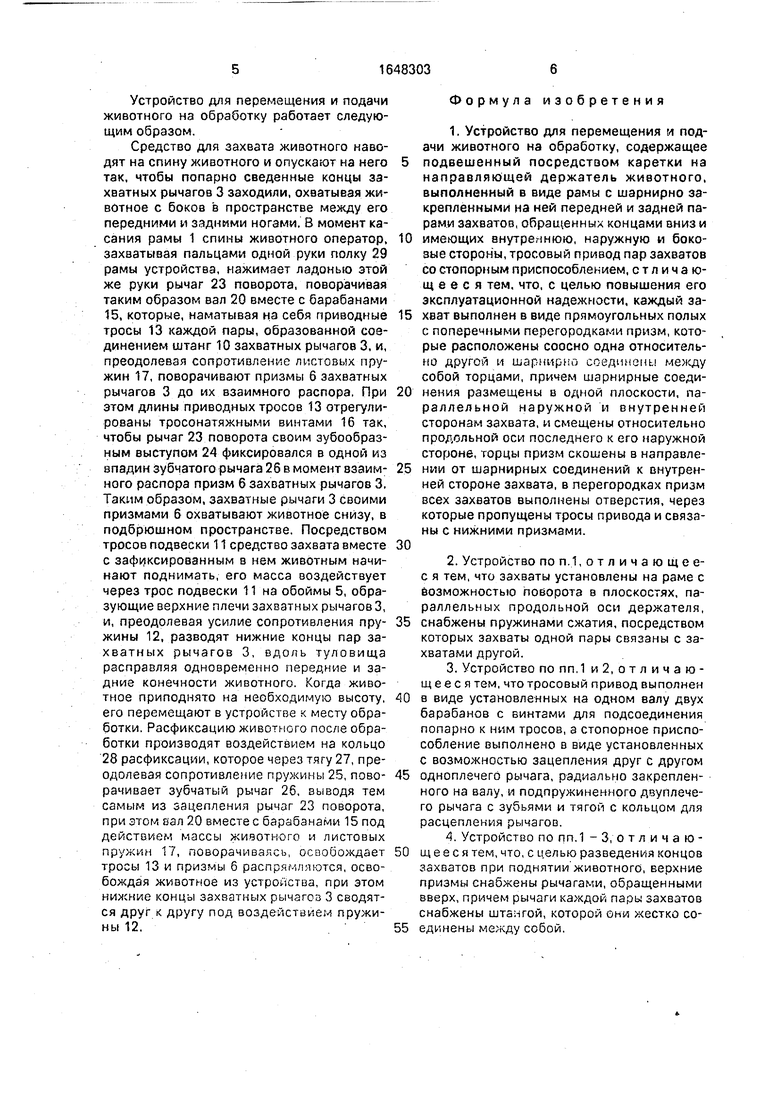
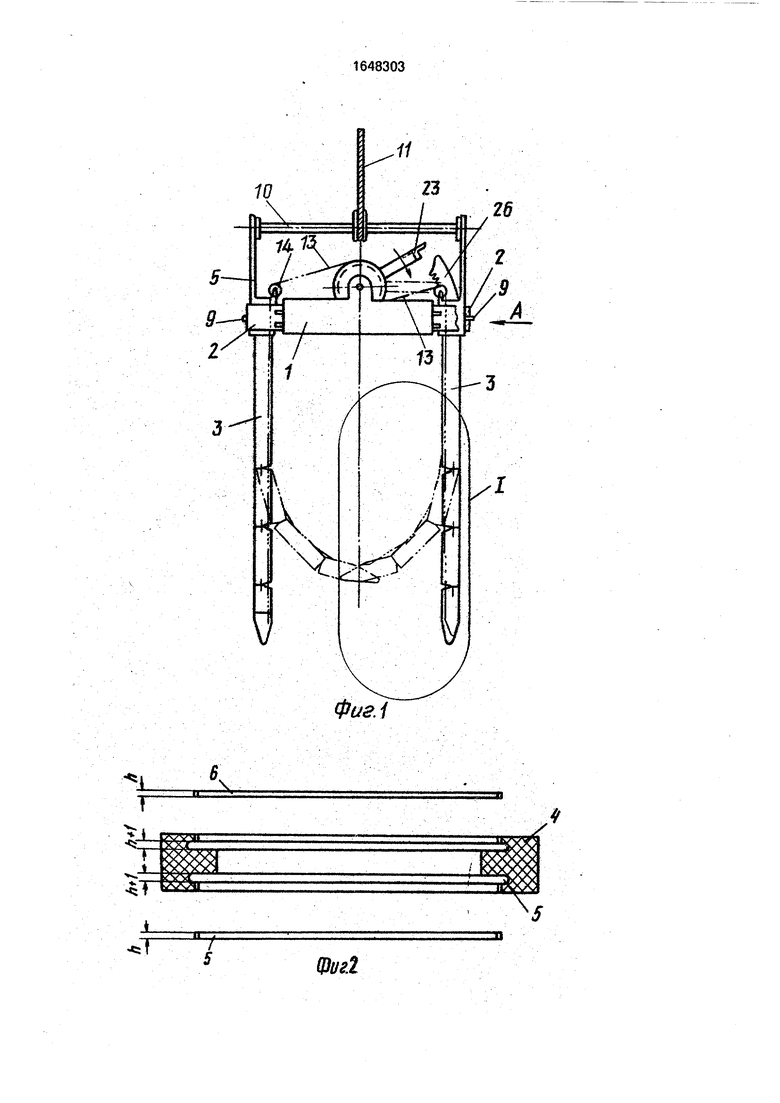
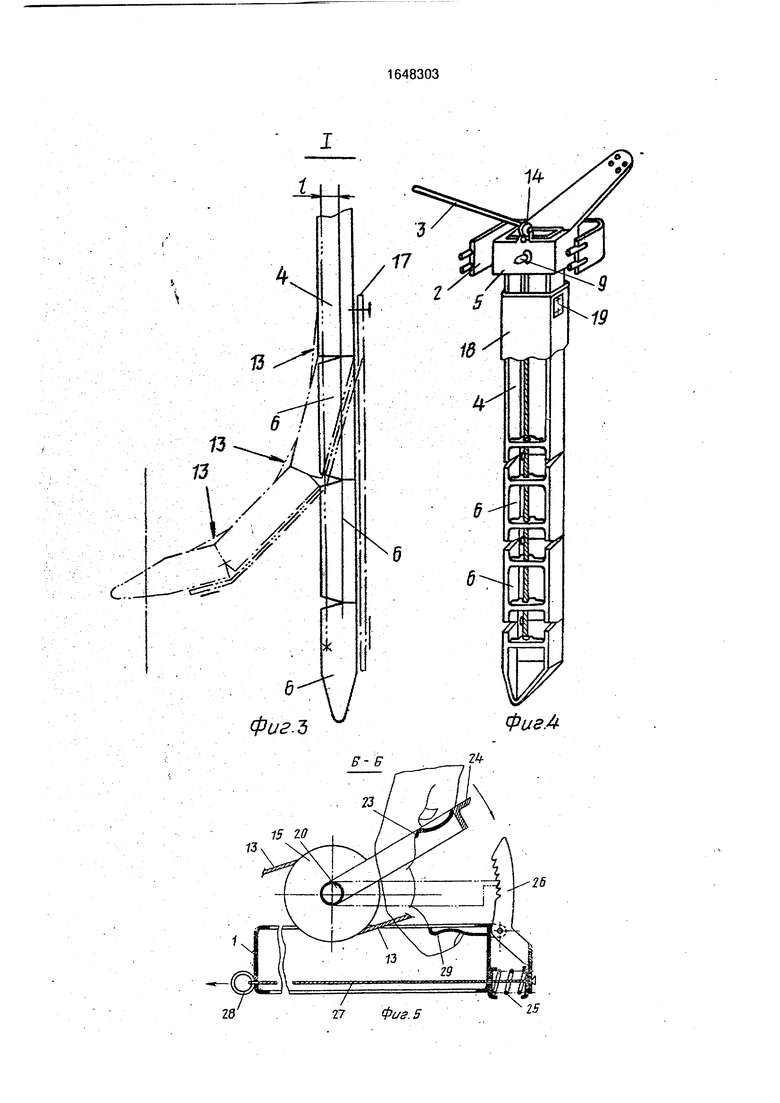
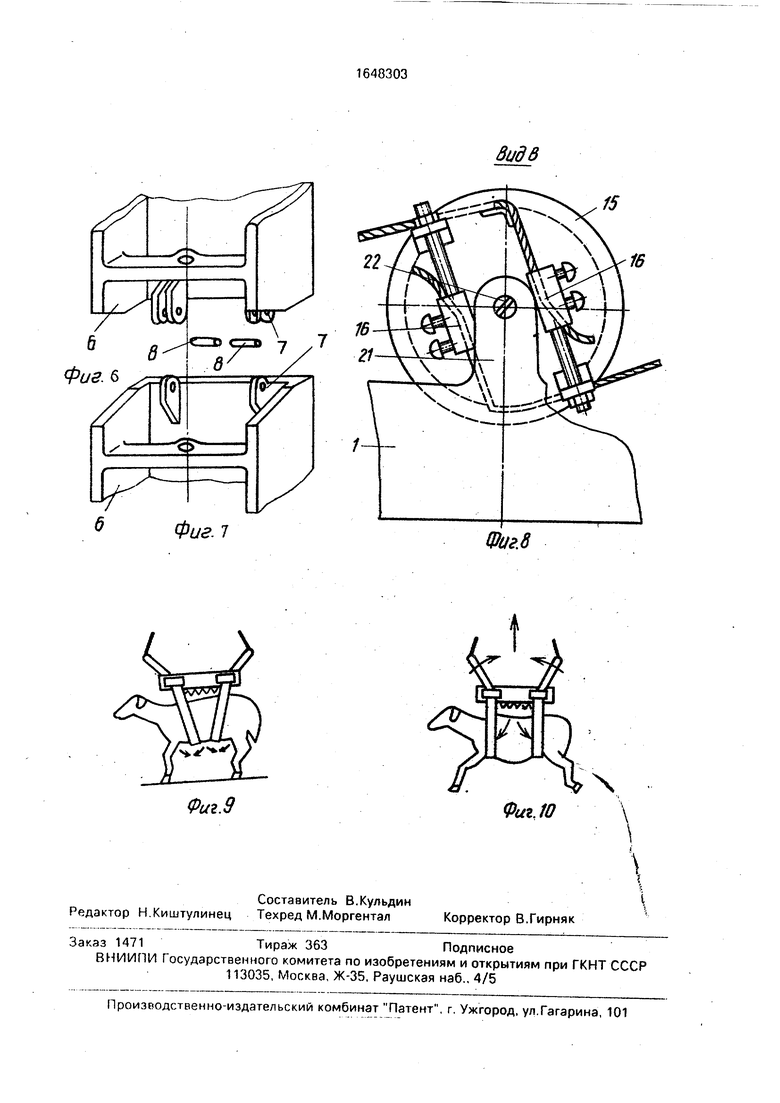
На фиг, 1 изображено устройство для перемещения и подачи животных на обработку, вид спереди; на фиг.2 - вид А на фиг.1; на фиг.З -узел I на фиг.1 (захватный рычаг); на фиг.4 - то же, веде амутремней стороны на фиг.5 -разрез Б - S на фиг,2; на фиг.б - одно из звеньев рычага; на фиг,7 - кижерас- положекиое смежное звено по отношению к звену на фиг.6; на фиг.8 - вид 8 на фиг,2; на фиг.9 - рычага во время фиксации овцы; на .10 - то же, рычага, во аремя подъема и перемещения овцы.
Устройство для перемещения м подачи животного на обработку содержит средство для захвата животного, состоящее из рамы . 1 в виде четырехугольного контура, на сторонах которого шарнирно закреплены посредством скоб 2 захватные рычаги 3. Каждый захватный рычаг 3 состоит из секций 4, неподвижно закрепленных в обоймах 5, и полых прямоугольных призм 6, шарнир- но связанных между собой и секциями 4 посредством имеющихся а них проушин 7 и пальцев 8. Обоймы 5 имеют выступающие оси 9, которыми они установлены с одной стороны в отверстия рамы 1, а с другой - в отверстия скобы 2. Полые прямоугольные призмы 6 со стороны их шарнирных соединений имеютскосы, обеспечивающие их поворот относительно друг друга на требуемый угол в направлении внутреннего пространства рамы 1. Захватные рычаги 3 попарно связаны между собой посредством обоймы 5 и крепящихся в них штанг 10 а штанги 10 посредством тросовых подвесок 11 соединены с кареткой перемещения (не показана). Образованные таким образом пары захватных рычагов 3 сблокированы
тановлены на валу 20, который шарнирно установлен в стойках рамы 1 резьбовыми осями. В средней его части закреплен рычаг 23 поворота, имеющий зубообразный выступ, фиксируемый пружиной зубчатого рычага, который связан тягой с кольцом расфиксации. В процессе работы овец захватывают рычагами 3 и перемещают к месту обработки. 3 з.п.ф-лы, 10 ил.
между собой пружинами 12 так, что нижние концы захватных рычагов 3 сведены друг к другу. Через отверстия s поперечных перегородках призм б и секций 4 каждого захватного рычага 3 пропущены приводные тросы 13, один конец которых закреплен к поперечным перегородкам крайних нижних призм 6, а вторые концы выведены через блоки 14 на барабаны 15 и попарно закреплены на их торцовых частях посредством тросонатяжных винтов 16. При этом взаимное расположение барабанов 15 и блоков 14 обеспечивает неизменность длины приводного троса 13 на этом участке в крайних
положениях пар захватных рычагов 3. Нижние призмы 6 имеют заостренную книзу скошенную форму. Линия действия -троса 13 смещена относительно линии, проходящей через оси шарнирных соединений призм на
плечо Е. Призмы 6 подпружинены листовыми пружинами 17 и благодаря этому они занимают вертикальное положение. На захватные рычаги 3 одеты эластичные предохранительные чехлы 18 и закреплены на.
секциях 4 посредством планок 19. Барабаны 15 неподвижно установлены на валу 20, который в свою очередь шарнирно установлен а стойках 21 рамы 1 посредством резьбовых осей 22. При этом резьбовые оси 22 у ста но влены в резьбовые отверстия стоек 21 и своими выступающими частями за плоскость стоек 21 входят в имеющиеся на торцах вала 20 углубления, тем самым фиксируя вал 20 в горизонтальном положении и создавая возможность его поворота. На валу 20, в средней его части, закреплен рычаг 23 поворота, выполненный в виде П-образной ручки и имеющий зубообразный выступ 24, которым он фиксируется в одной из впадин подпружиненного пружиной 25 зубчатого рычага 26. Зубчатый рычаг 26 связан тягой 27 с кольцом 28 рэсфйксации. На раме 1 напротив П-образной ручки - рычага 23 поворота установлена выпуклая полка 29, которая создает опорную ллосгссть пальцам рук оператора при повороте рычага 23.
Устройство для перемещения и подачи животного на обработку работает следующим образом.
Средство для захвата животного наводят на спину животного и опускают на него так, чтобы попарно сведенные концы захватных рычагов 3 заходили, охватывая животное с боков в пространстве между его передними и задними ногами. В момент касания рамы 1 спины животного оператор, захватывая пальцами одной руки полку 29 рамы устройства, нажимает ладонью этой же руки рычаг 23 поворота, поворачивая таким образом вал 20 вместе с барабанами 15, которые, наматывая на себя приводные тросы 13 каждой пары, образованной соединением штанг 10 захватных рычагов 3, и, преодолевая сопротивление листовых пружин 17, поворачивают призмы 6 захватных рычагов 3 до их взаимного распора. При этом длины приводных тросов 13 отрегулированы тросонатяжными винтами 16 так, чтобы рычаг 23 поворота своим зубообраз- ным выступом 24 фиксировался в одной из впадин зубчатого рычага 26 в момент взаим- ного распора призм 6 захватных рычагов 3. Таким образом, захватные рычаги 3 своими призмами 6 охватывают животное снизу, в подбрюшном пространстве. Посредством тросов подвески 11 средство захвата вместе с зафиксированным в нем животным начинают поднимать, его масса воздействует через трос подвески 11 на обоймы 5, образующие верхние плечи захватных рычагов 3, и, преодолевая усилие сопротивления пру- жины 12, разводят нижние концы пар захватных рычагов 3, вдоль туловища расправляя одновременно передние и задние конечности животного. Когда животное приподнято на необходимую высоту, его перемещают в устройстве к месту обработки. Расфиксацию животного после обработки производят воздействием на кольцо 28 расфиксации, которое через тягу 27, преодолевая сопротивление пружины 25, пово- рачивает зубчатый рычаг 26, выводя тем самым из зацепления рычаг 23 поворота, при зтом вал 20 вместе с барабанами 15 под действием массы животного и листовых пружин 17, поворачиваясь, освобождает тросы 13 и призмы б распрямляются, освобождая животное из устройства, при этом нижние концы захватных рычагсз 3 сводятся друг к другу под воздействием пружины 12.
Формула изобретения
ФигЛ
js. 1
ixxj.
WT
5
Фиг
с...
13
27фиг 5
2//юа
5
9 19
т
ФигЛ
Б- Б
Фиг. б
Фиг. 7
Фиг.9
Вид В
15
16
Шиг.8
