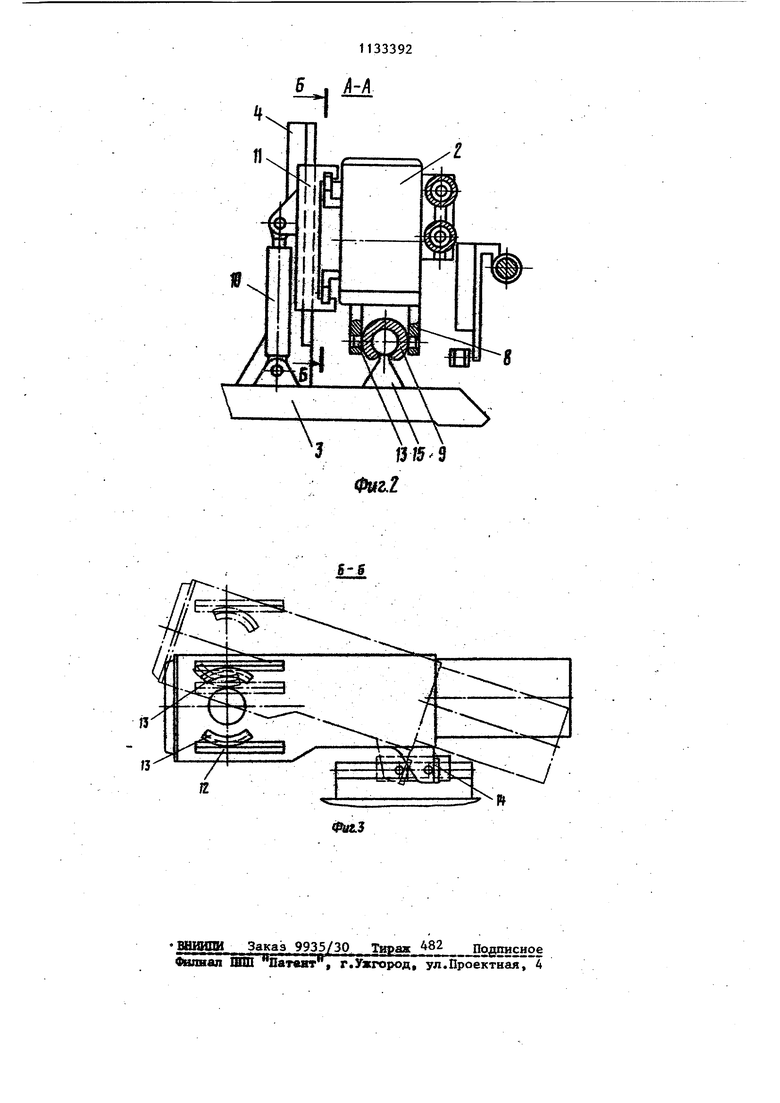
Изобретение относится к разработ ке полезных ископаемых подземным способом, а именно к средствам механизации выемки угля. Известны фронтальные агрегаты, содержащие мехднизированную крепь, кольцевой струговьй исполнительньй орган, приводы, линейные направляющие, установленные на базовых элементах крепи, подъем и опускание которых осуществляется с помощью гидродомкратов, и концевые направляющие, закрепленные на приводах у Недостатками этих агрегатов ляются невозможность регулирования приводов в вертикальной плоскости и. Как следствие, невозможность управления агрегатом по гипсометрии по концам лавы. Наиболее близким к изобретению по технической сущности и достигаемому результату является механизм регулирования положения привода фронтального агрегата, содержащий гидродомкраты подъема, гидродомкраты натяжения цепей, кронштейн и оп ру привода, закрепленные на базе агрегата, фиксирующие пальцы и обой му с ползунами 2 ( . Недостатками известного механизма являются значительный крутяпщй момент на корпус привода и поперечные нагрузки на гидродомкрат подъема, возникающие от сил резания. Цель изобретения - повьппение надежности механизма регулирования в работе за счет устранения попереч ной нагрузки на гидродомкраты подъема и уменьшения нагруженности корпуса привода. Указанная цель достигается тем, что механизм регулирования положения привода фронтального агрегата, содержащий гидродомкраты подъ ема , гидродомкраты натяжения цепей кронштейн и опору привода. закрепл ные на базе агрегата, снабжен плнтой с горизонтальными направляющими, подвижно соединенной с базой агрегата с помощью вертикальной стенки и установленной на штоках гидродомкратов подъема, и сегментами, жестко закрепленными на приводе , при этом сегменты размещены в направляющих .плитах, а опора привода выполнена в виде скользящего захвата. На фиг. 1 изображен механизм регулирования положения привода фронтального агрегата, на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 2. Основными узлами агрегата являются секции крепи 1, привод 2, установленньй на базе агрегата, состоящей из оснований 3 и вертикальной стенки 4, исполнительньй орган 5, перемещающийся по направляющим 6. Механизм регулирования положения привода содержит гидродомкраты 7 натяжения цепи, кронштейн 8 со скользящим захватом 9, за.креш1енный на приводе 2, гидродомкраты 10 подъема привода к штокам которых крепится плита 11, подвижно закрепленная на вертикальной стенке 4 и имеющая горизонтальные направля-ющие 12. Привод со стороны выработанного пространства снабжен сегментами 13, которые входят в горизонтальные направляющие 12 плиты 11 и допускают поворот привода 2 относительно плиты. Захват 9 шарнирно закреплен в кронштейне 8 с помощью осей 13 и планок 14; опираясь на направляющую 15 основания, имеет возможность перемещаться, Для установки привода 2 в нужное положение при выемке угля в забое или при настройке по гипсометрии : по концам лавы включаются гидродомкраты 10 подъема привода 2, поднимая или опуская соединенную с ними плиту 11 по вертикальной стенке 4, а вместе с ней и привод 2. сегменты 13 которого размещены в горизонтальных направляюищх 12 плиты 11. При подъеме происходит поворот привода 2 относительно оси шарнира захвата и некоторое смещение по направляюа ей 15 основания 3. Аналогичное перемещение происходит при работе домкратов 7 натяжения цепи. Предлагаемое изобретение позволяет разгрузить гидродомкраты подъема от поперечных нагрузок и снизить нагруженность корпуса привода.
я й-а
Фиг.г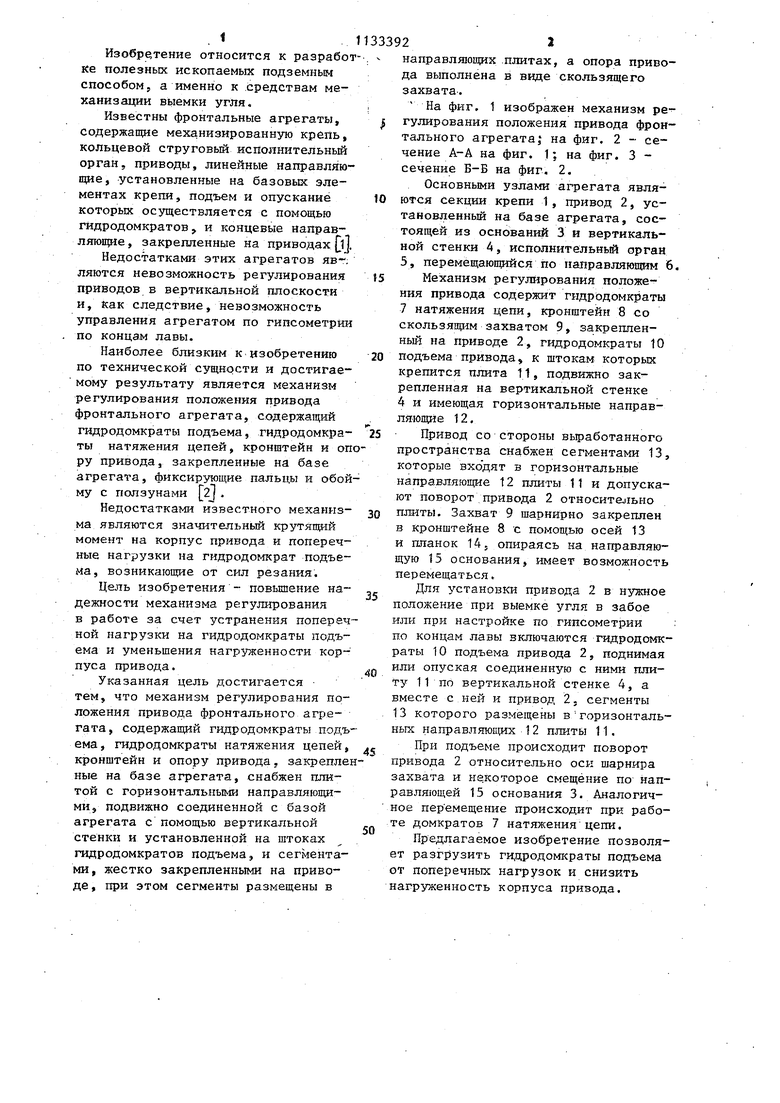
МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ПРИВОДА ФРОНТАЛЬНОГО АГРЕГАТА, содержащий гидродомкраты подъема, гидродомкраты натяжения цепей, кронштейн и опору привода, закрепленные на базе агрегата, о тличающийся тем, что, с целью повышения надежности механизма в работе за счет устранения поперечной нагрузки на гидродомкраты подъема и з еньшения нагруженности корпуса привода, он снабжен шштой с горизонтальньо ш направляющими, подвижно соединенной с базой агрегата с помощью вертикальной стенки и установленной на штоках гидродомкратов подъема, и сегментами, жестко за1фепленньши на приводе, при i этом сегменты размещены в направляющих плитах, а опора привода выполнена в виде скользящего захвата.
13
Е
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ФРОНТАЛЬНЫЙ ОЧИСТНОЙ АГРЕГАТ | 0 |
|
SU277680A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм регулирования положения привода агрегата фронтального действия | 1976 |
|
SU604992A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
