Известны фронтальные очистные агрегаты для механизации и автоматизации выемки угля, включающие механизированную крепь, забойные гидравлические стойки, передвижной конвейер, кольцевой рабочий орган с тяговой цепью и шарнирно укрепленными стругами, датчики и иереводиые устройства.
Предлагаемый агрегат отличается от известпых тем, что, кольцевой рабочий орган выполнен со стругами скользящего типа и снабжен верхними и нижними наклонными направляющими. Верхние направляющие снабжены гидроцилиндрами, соединенными попарно поверху рамами. При этом гидроцилипдры соосны с забойными гидростойками и имеют независимое от них регзлирование, а переводные устройства выполнены с направляющими звездочками, контактирующими при переводе с роликами скользящих стругов.
Кольцевой рабочий оргаи может быть сиабжен круглозвеиной цепью. Датчики следует установить на зондирующих каретках, укрепленных на тяговой цени перед скользящими стругами.
Это обеспечивает выемку угля в длинных лавах с маломощными пластами, сопротивления при выемки и уменьщение усилий, действующих на конструкцию.
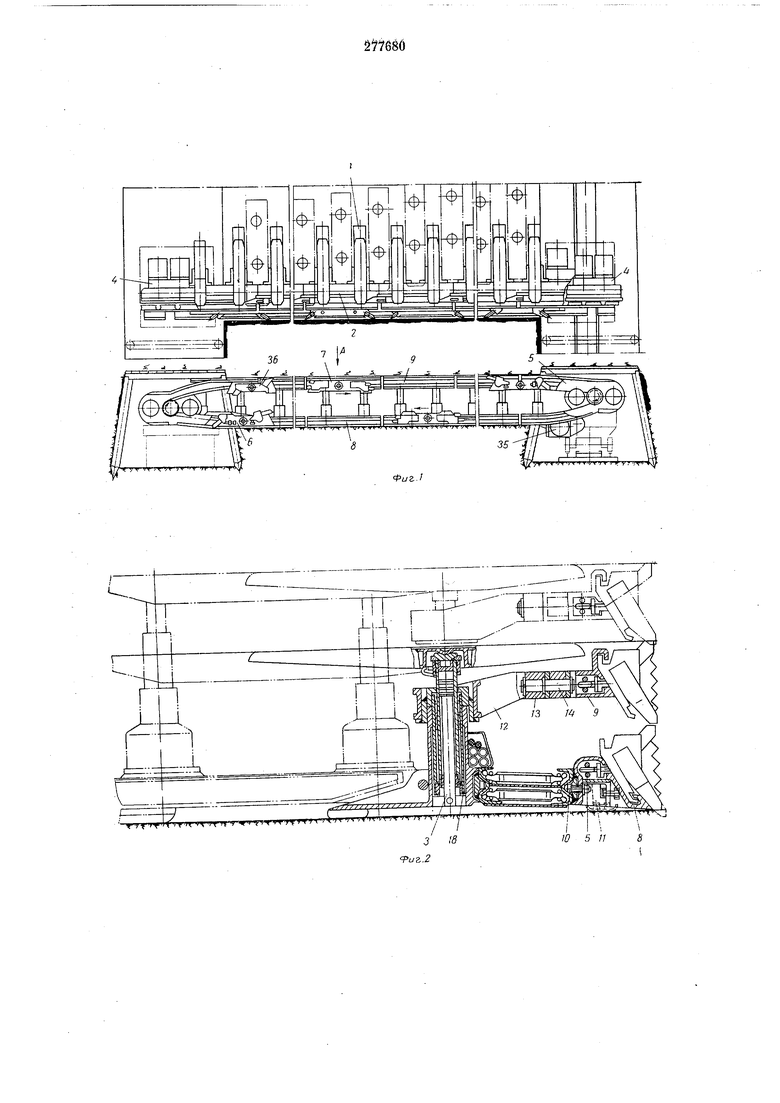
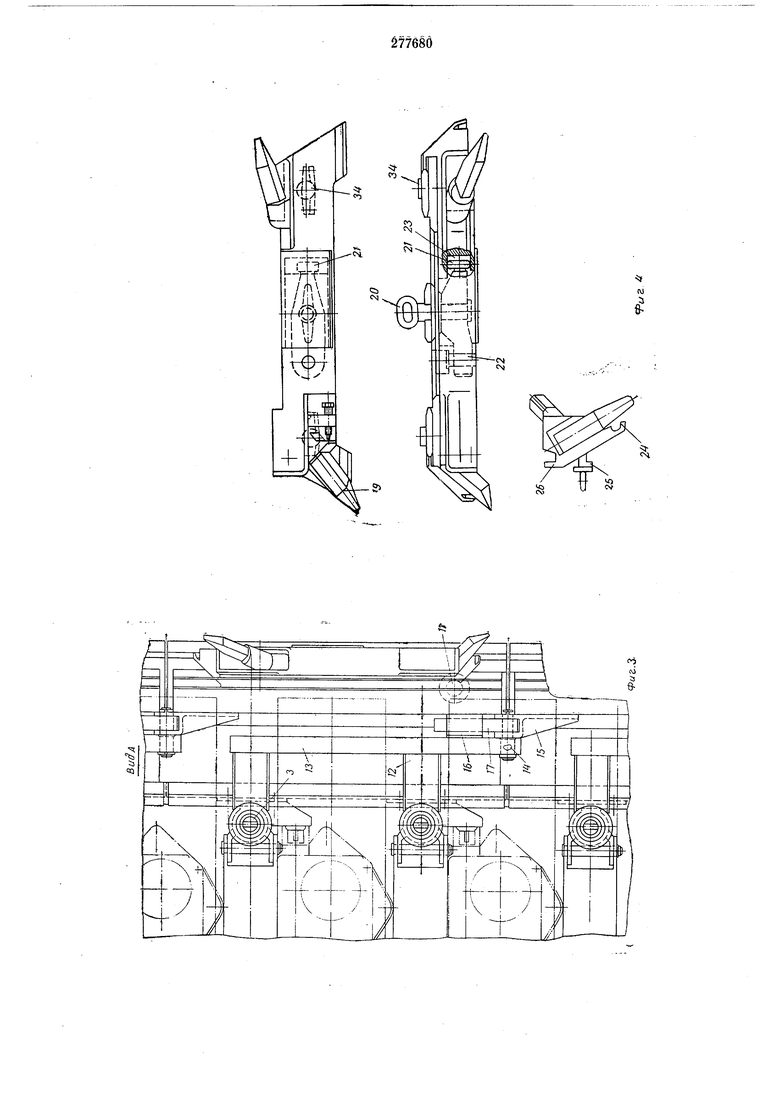
ный разрез по лаве; на фиг. 3- вид по стрелке А на фиг. 1; на фиг. 4 - скользящий струг с резцами в трех проекциях; на фиг. 5- переводной механизм.
Фронтальный очистной агрегат содержит механизированную крепь 1, передвижной забойный конвейер 2, гидравлические забойные стойки 3 и кольцевой рабочий орган. ПоследНИИ выполиен со скользящими стругами и состоит из двух концевых приводов 4, приводящих в движение тяговую цепь 5 с закрепленными на ней шарнирно скользящими стругами 6, 7 и т. д., которые движутся по нижней
5 и верхней 9 наклонным направляющим. Нижняя направляющая 8 крепится к забойному борту секции коивейера 2 болтами 10, имеет кожух, закрывающий нижнюю ветвь тяговой цепи 5, и два направляющих паза для
направления стругов.
Под нижней направляющей размещены гидравлические домкраты 11 {гидроцилиндры) для управления рабочим органом по гипсометрии почвы. Две гидравлические забойные
стойки 3 прикреплены с завальной стороны к каждой секции конвейера и объединены двумя кропщтейнамй 12 с балкой 13. К этой балке, которая соединяет кронщтейны в единую раму, щарнирно на оси 14 подвешена верхняя
Верхняя направляющая 9 представляет собой шарнирно соединенные балки, которые могут раздвигаться в продольном направлении. В этих балках заключена верхняя ветвь тяговой цепи и имеются два паза для направления ско;|ьзящих стругов. Один конец балки верхней направляющей расположен на оси 14 с помощью проушин 15, а другой конец соединен со следующей осью при помощи скользящей в направляющем пазу 16 проущины 17.
Гидравлические стойки 3 служат для поддержания кровли в призабойной части рабочего пространства и для поддержания и регулирования положения верхней направляющей 9.
Для управления рабочим органом каледая гидравлическая стойка снабжена встроенным соосным гидроцилиндром 18, имеющим дистанционное и автоматическое управление, не зависящее от расиора гидравлической стойки 3, поддерживающей кровлю.
Скользящие струги 6, 7 п т. д. содержат корпус, оснащенный с двух сторон резцами 19, и устройство для подвески к тяговой цепи. Резцы закреплены на корпусе щарнирно и могут отходить от забоя при движении струга в обратном направлении.
Устройство для подвески включает звено с пальцем 20, закрепленным шарнирно в рычаге 21. Последний одним концом прикреплен щарнирно при помощи оси 22 к корпусу скользящего струга, а другим заходит в паз 23 корпуса скользящего струга. Такое крепление струга позволяет ему проходить без заеданий по изогнутым в вертикальной плоскости направляющим с относительным углом поворота до 5-7°. Корпус струга имеет три пары опор 24, 25 и 26. Нижняя 24 и средняя 25 опоры используются при движении по нижней направляющей, а верхняя 26 и средняя 25 - при движении ио верхней направляющей.
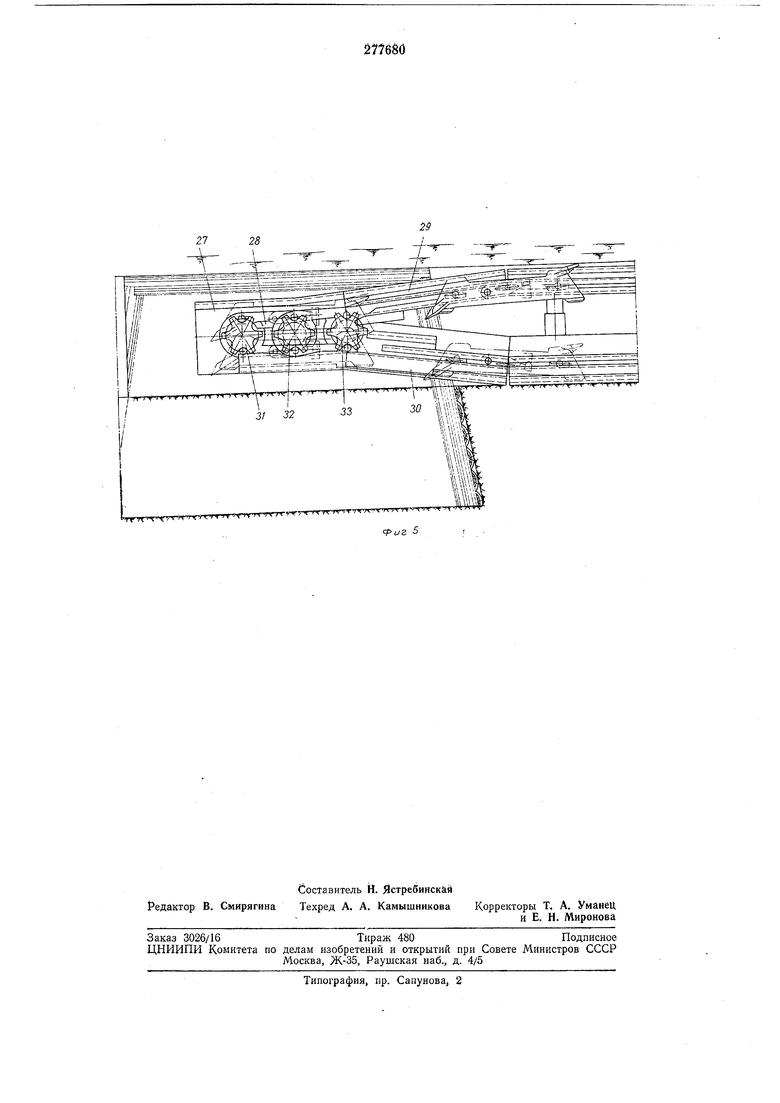
Концевые приводы 4 состоят из редуктора с гидродвигателями и переводных механизмов, которые служат для перевода скользящих стругов с нижней направляющей 8 на верхнюю 9 и наоборот. Переводной механизм состоит из плиты 27, закрепленной на приводе и снабженной направляющими выступами 28 для скользящих стругов, верхней 29, нижней 30 концевых направляющих и трех переводных звездочек 31-33. Средняя звездочка 32 является одновременно приводной для тяговой цепи 5.
Две крайние переводные звездочки вращаются синхронно с приводной в одном направлении и при подходе скользящего струга к приводной звездочке захватывают его зубцами за два ролика 34, укрепленных на внутренней стороне струга. Струг оказывается зафиксированным в трех синхронно вращающихся точках и в таком положении выходит опорами из нижних (верхних) направляющих и переводится в верхние (нижние) направляющие. Расстояние между приводной звездочкой и крайними переводными звездочками таково, что при проходе струга над или под крайней переводной звездочкой ее зубцы не мешают проходу устройства для подвески струга.
Возможно совмещение нриводной звездочки 32 с одной из переводных звездочек 31 или 33. При этом шарнирное закрепление скользящего струга и тяговой цепи осуществляется в одной из опор 25 корпуса струга.
Секции конвейера выполнены с закрытым дном. Для доступа к нижней ветви имеются секции с люком, устанавливаемые через четьфе линейные секции аналогично конвейеру СП63/С2. Привод конвейера 35 выполнен без подъема рабочей ветви цепи на участке привода, что достигнуто за счет выноса его на щтрек. Это дает возможность грузить уголь
на конвейер в начале лавы у привода, где погрузочная высота такая, как и у линейных секций.
При установке конвейера в пласте (без выноса привода в штрек) угол подъема рабочей
ветви не превышает нормального угла подъема на существующих конвейерах.
Автоматическое и дистанционное управление комплексом осуществляется с центрального пульта, расположенного на штреке.
Фронтальный очистной агрегат работает следующим образом. Концевые приводы 4 кольцевого рабочего органа со скользящими стругами вращают приводные звездочки 32 и приводят в движение тяговую цепь 5. При
этом скользящие струги 5, 7 и т. д., расположенные на нижних и верхних направляющих, перемещаются вдоль забоя и скалывают уголь .передними по движению резцами. Струги отличаются расстановкой резцов.
Струг 6 при движении по нижней направляющей 5 обрабатывает забой у почвы одним нижним резцом, а при движении по верхней направляющей 9 - забой у кровли другим верхним резцом.
Струги 7 при движении по нижней и верхней направляющим обрабатывают остальную часть пласта. Оставшаяся средняя начка угля обрабатывается скользящими стругами с откидными резцами (на чертежах не показаны).
При необходимости верхняя направляющая 9 дистанционно опускается одновременно по всей длине лавы, и средняя пачка угля срезается без помощи откидных резцов. Вслед за проходом струга 6 по нижней направляющей
8 агрегат передвигается к забою до упора направляющей в забой, так как домкраты крепи осуществляют постоянный прижим ее к забою. Секции механизированной крепи, расположенные по елочной схеме, передвигаются к забою автоматически по мере окончания хода домкрата.
регата на забой) с передвижкой определенного числа секций крепи к забою.
При подходе скользящих стругов к концевым частям кольцевого рабочего органа они попадают на переводные механизмы н переходят параллельно самим себе (без поворота) с нижней (верхней) направляющей 8 на верхнюю (нижнюю) направляющую 9.
Для автоматического управления кольцевым рабочим органом по гиисометрии и мощности пласта перед скользящнм стругом 6 на необходимом расстоянии, позволяющем исключить запаздывание срабатывания системы управления, установлены зондирующие каретки 36 с датчиком «уголь-порода, снабженные автономной системой питания датчика и иередающей системы.
В качестве датчика «уголь-порода могут быть приняты известные датчики: резцовый, основанный на разном усилии резания угля и породы, резцовый, основанный на различии трения резца об уголь и иороду, датчик, основаниый на разной электропроводимости угля и породы, и др. Полученный от датчика сигнал поступает в передающее устройство (радиопередатчик), которое передает его на центральный нульт унравления, где этот сигнал усиливается и сообразно положению в лаве зондирующей каретки иередает сигнал на управляющую аппаратуру гидравлических домкратов 1} гидроцилиидра 18, находящегося в данный момент против зондирующей каретки.
Возможна передача сигнала неиосредственно на управляющую аппаратуру, установленную на каждом гидродомкрате (гидроцилиндре).
В зависимости от сигнала гидродомкрат либо поднимает, либо опускает направляющую относительно почвы (кровли) на онределенную величину. Управление верхней и нижней направляющими кольцевого рабочего органа, равно как и другими узлами агрегата, может быть осуществлено дистанционно с центрального иульта управления. Установка зондирующей каретки впереди скользящего струга позволяет исключить запаздывание, зависящее от быстрого, действия срабатывания системы исполнения.
Для более четкого разграничення унравлення одна зондирующая каретка онределяет положенне кольцевого рабочего органа относительно почвы, а другая - иоложенне кольцевого рабочего органа (верхней направляющей) относительно кровли.
Предмет изобретения
1.Фронтальный очистиой агрегат для механизации и автоматизации выемки угля,
включающий мехаиизированную крепь, забойные гидравлические стойки, передвижной конвейер, кольцевой рабочий орган с тяговой ценью и щарнирно укреиленными стругами,
датчики и переводные устройства, отличающийся тем, что, с целью обеспечеиия выемки угля в длииных лавах с маломощными пластами, снижения соиротивления ири выемке и уменьщення действующих на конструкцию
усилий, кольцевой рабочий орган выполнен со стругамн скользящего тина н снабл ен верхними н ннжними наклонными нанравляющими, причем верхние наиравляющие снабл :ены гидроцилиндрами, соедииенными попарно поверху рамами, при этом гидроцилиндры соосны с забойными гидравлическими стойками и имеют независимое от них регулирование, а переводные устройства вынолнены с направляющими звездочками, контактирующими ири
переводе с роликами скользящих стругов.
2.Агрегат по н. 1, отличающийся тем, что, с .целью обеспечения гибкости в илоскости пласта, кольцевой рабочий орган снабжен круглозвенной цепью.
3. Агрегат но ип. 1 и 2, отличающийся тем, что, с целью исключения запаздывания регулирования выемки но мощности пласта, датчики установлены на зондирующих каретках, укрепленных на тяговой цени иеред скользящими стругами.
| название | год | авторы | номер документа |
|---|---|---|---|
| АГРЕГАТ ДЛЯ МЕХАНИЗАЦИИ И АВТОМАТИЗАЦИИ ОЧИСТНЫХ РАБОТ | 1969 |
|
SU239897A1 |
| АГРЕГАТ СТРУГОДОСТАВОЧНЫЙ, СТАВ СТРУГОДОСТАВОЧНОГО АГРЕГАТА, МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ НАПРАВЛЯЮЩИХ, АГРЕГАТНАЯ КРЕПЬ, ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ, УСТРОЙСТВО ДЛЯ ПОДХВАТА ПРИЗАБОЙНОЙ КРОВЛИ, ОПОРНАЯ БАЗА КОЛЬЦЕВОГО СТРУГА | 2000 |
|
RU2182668C2 |
| СТРУГОВЫЙ КОМПЛЕКС, СЕКЦИЯ КРЕПИ, УСТАНОВКА СТРУГОВАЯ, БАЗА СТРУГОВАЯ, ПРИВОД СТРУГА, ПЕРЕГРУЖАТЕЛЬ УКОРОЧЕННЫЙ, КРЕПЬ СОПРЯЖЕНИЯ, МАНИПУЛЯТОР ПЕРЕДВИЖНОЙ | 1999 |
|
RU2163970C1 |
| Узкозахватный выемочный агрегат | 1960 |
|
SU148771A1 |
| СТРУГОВАЯ УСТАНОВКА | 1995 |
|
RU2122636C1 |
| УГЛЕДОБЫВАЮЩИЙ АГРЕГАТ | 1996 |
|
RU2130553C1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
| Фронтальный очистной агрегат | 1975 |
|
SU581265A1 |
| Струговый агрегат | 1987 |
|
SU1559138A1 |
| УГОЛЬНЫЙ СТРУГ | 1967 |
|
SU192133A1 |
Л
