Изобретение относится к релейным устройствам автоматического управления и может быть использовано для трехпозиционного регулирования пьезоэлектрических двигателей.
По основному авт. св. № 1023278 известен импульсный регулятор перемещения пьезодвигателя, содержащий последовательно соединенные задатчик, устройство сравнения и трехпозиционный релейный усилитель, и последовательно соединенные источник напряжения, первый ключ и четыре ключа, соединенные по мостовой схеме,одна из диагоналей которой соединена с входами пьезодвигателя и с входами делителя, а другая - с выходом первого ключа, управляющий вход которого соединен с первым выходом трехпозиционного релейного усилителя, второй выход которого соединен с управляющими входами второго и третьего ключей мостовой схемы, а третий выход - с управляющими входами четвертого и пятого ключей мостовой схемы, выход-делителя соединен с вторым входом устройства сравнения, а выход гёиератора - с вторым входом трехпозиционяого релейного усилителя, электрический выход изолированной пьезопластины составного пьезодвигателя соединен с входом усилителя заряда, выход которого соединен с третьим входом устройства сравнения 1.
Известный регулятор предназначен для использования в системах автолштического управления с ограниченным диапазоном перемещения, однако при упругой HaiiiyaKe исполнительного двигатсопя Тс1К(;-го регулятора его точность существенно снижается.
Так, например, нр.м ynpyr jH исполнительного двигателя максимальный диапазон перемещения A{;in dMNUm,(1)
где dai |М./В - пьезомодуль;
W - число пьезопластин пьезодвигателя; амплитуда напряжения, подаваемого на пьезодвигатель, пьезодвигателя сужается.
При этом рабочий диапазон перемещения Л ,{mj пьезодвигателя записывается в
видеj .г,, л
АО OiiNUm Сд
4Е с;-- .(2)
гдеСд Н/м -г жесткоть пьезодвигателя;
Сн Н/м - жесткость упругой нагрузки
Следовательно, в известном импульсном регуляторе, где первоначальное перемени пьезодвигателя пропорционально нан; . ; кию и соответствует выражению (1). ; никает ощибка
Р dsiNUmCni-i
At--. -fZ , -л CH + CA при отработке перемещения л.
Целью изобретения яв; яется noBbuiii.Hne точности регулятора при упругой иаг1)узк(
Для достижения поставленной це :.- ;; импульсном регуляторе 11еремен1ения ч .-. ми)1 гателя донолните.пьно установ.Ин: опиьтр и блок двойного дифференн,ировани,;. .входом подключенный к выходу усилите, и :.;1)яда, а выходом через фильтр - к четве1 тому входу устройства сравнения.
В этом случае повышается точность регулятора в следящем режиме, так как напряжение на выходе устройства сравнения пропорционально перемещению нагрузки при уменьшении коэффициента передачи делителя, и скомпенсированы возмущающие факторы, возникающие из-за влияния жесткости и инерционности нагрузки.
На чертеже представлена структурная сл-ема импульсного регулятора перемеп1е1 ия пьезодвигателя.
Импульсный регулятор перемещення ньезодвигателя содержит устройство 1 сравнения, к выходу которого гюдключен |рехнози1ионный релейный усилитг,-;, 2, есс гоян1ий КЗ последовательно соед: :1екных ,,сйпого э.чемента 3 и реле 4-6, гггорые входы :нме 4-6 соединены е выходом генератора 7, выход реле 4 соединен с управляющим входом первого ключа 8, выход которого соединен с диа;-ональю мостсвой схемы 9, во ггорую диагоиаль мостовой схемы включен ги езодвигатель 10, источник 11 напряжения соединен с сигнальным входом ключа 8, причем электрические входы пьезодвигателя 10 соединены с входами делителя 12, выход которого соединен с вторым входом уст1)ойства 1 сравнения, мостовая схема 9 состоит из второго 13, третьего 14, четвертого 15 и пятого 16 ключей, причем изолированная пьезопластина 17 жестко прикреплена к выходному торцу пьезодвигателя 10. электрический выход изолированной пьезопластины 17 соединен с входом усилителя 18 заряда, выход которого соединен с третьим входом устройства 1 сравнения и с входом блока 19 двойного дифференцирования, пыход которого подключен к входу фильтра 2i), выход которого соединен с четвертым vxoдом устройства 1 сравнения, первый которого подключен к выходу задатчикя 2i,
Регулятор работает слелтующим образ . -Задающий сигнал с выхода задатчи1 п : через устройство 1 сравне.гия ностхнае; :i;i вход трехпозиционного ре.пейного ycii.inTeля 2. В зависимости ог пГ)Л фности залг;к:. Htero сигнала при превышении зоны нечсн с1БИте. релейного э.1е.мекта 3 в-:.;м чаютси реле 5 или 6, а также реле -1.
При этом на вторые входы реле 4 ь нхтупают тактирующие импульсы с ген.ратора 7. Реле 4 обеспечивает з соочв-;/:ствии е тактирующими .i.bca.viii с ;Ci:i ратора 7 включение ключа 8, котор ж питает (иясоким напряжением с источника 11 напряжения однх из диагоналей мостовой схемы 9, в другую диагональ включен ньезодвигатель 10.
Реле 5 и 6, KOTopi,ie соединены с управляющими входами ключей 13-16, включенных в противогю.тожные плечи мостовой схемы, открывают п соответстгиш с тактирующими импульсами с генератора 7 ключи 13 1 14 или 15 и 16 (например, тиристоры, онтроны, транзисторы) в противоположных плечах мостовой схемы 9, через которые ироисходит заряд емкости пьезодвигателя 10. Следовательно, рас1иирен11е или сжатие пьезодвигателя 10 происходит в зависи.мости от полярности задающего сигнала. Деформация пьезодвигателя 10 вызывает деформацию изолированной пьезопластины 17j что приводит к появлению электрического напряжения на обкладках изолированной пьезопластииы 17. Это напряжение усиливается усилителем 18 заряда и подается на трсгий вход устройства 1 сравнения и на вхо;: б.ижа 19 двойного дифференцирования, 1и.1хг;д которого через фильтр 20 подключен к четвочюму входу устройства сравнения. Р) кач.С11-,сфильтра 20 может быть применен любой ы 1сокочастотнь1Й фильтр. При этом на выходе устройства 1 сравнения формируется напряжение, пропорциональное отклонению текущего перемещения пьезодвигателя от заданного.
Изолированная пьезопластина 17 составного пьезодвигателя 10, являющаяся чувствительным элементом пьезодатчика, находится между пьезодвигателем 10 и механической нагрузкой. Следовательно, усилие , воспринимаемое изолированной пьезопластиной, равно
д (р) (р) + --Й-АтГ А Р)
Сд -h Си где Р - оператор Лапласа; m jirj - масса нагрузки; ОСн1-М1 перемещение нагрузки; Хд LM-l - перемещение пьезодвигателя при отсутствии упругой нагрузки;Сд1Н/м жесткость пьезодвигателя; - жесткость упругой нагрузки. Перемещение нагрузки меньше, чем соответствующее перемещение ЗЕд м при равном электрическом напряжении пьезо двигателя 10 при отсутствии упругой нагрузки, и определяется выражением ХЯ(Р) (р)-ог1сн-: Подставив выражение (5) в уравнение (ч), получаем выражение для усилия, воепринимаемого пьезопластиной 7 Гд (р) xs{p)(mp -f CH).(6)
Из выражения (6) видно, что усилие , действующее на изолированную пьезоп.тастину 17, пропорционально перемеН1еиию и ускорению нагрузки, следовательно, напряжение UK В с обкладок пьезонластины, использующееся как сигнал обратной связи и через усилитель 18 заряда подающеееся на третий вход устройства 1 сравнения, также пропорционально перемещению и ускорению нагрузки.
,, , . с1ззРд Ф) ззХкСр)(трЧС«) Ьк(р) с- -с- 7)
где djiLM/B - пьезомодуль;
-емкость изолированной
пьезопластины.
Причем напряжение Uy-j В на выходе усилителя 18 заряда равно .
Uy.3 КуШ,
(8)
где Ку- коэффициент передачи усилителя
заряда.
При работе предлагаемого импульсного регулятора перемещения пьезодвигателя напряжение с обкладок изолированной пьезопластины 17, усиленное усилителем 18 заряда, поступает на вход блока 19 двойного дифференцирования с передаточной функциейW (р) f р2,(9)
где Тсс V- - постоянная времени дифференциатора;т1кг -масса нагрузки; -жесткость упругой нагрузки.
Выходной сигнал блока 19 двойного дифференцирования поступает на вход фильтра 20 с передаточной функцией
(p)wVr(10) Выходной сигнал фильтра 20 подается на четвертый вход устройства 1 сравнения. При этом выходной сигнал устройства 1 сравнения при упругой нагрузке на пьезодвигатель 10 равен Uc(p) Ujip) - Uy-3(p) + Uy.j(p)W(p) X X W (p) - koUA(p) из(р) -Ki4l «(E.J5PjLPH)/ TV CKV ) (р) U5(p) -kiXH(.p)-koU(p), (.11) гдеUjtb - задающее накДВ/к. пряжение; - коэффициент передачи корректирующего канала;
-коэффициент передачи делителя;
-напряжение, подаваемое н-а пьезодвигатель с выхода импульсного усилителя.
Следовательно, в предлагаемом импульсном регуляторе перемещения пьезодвигателя напряжение на выходе устройства 1 сравнения пропорционально перемещению нагруз.ки. В целом это повыщает точность регулятора в следящем режиме при отележивании требуемого перемещения, так как скомпенсированы возмущающие факторы из-за влияния упругости и инерционности нагрузки.
Предложенной импульсный регулятор перемещения пьезодвигателя позволяет улучщить точностные характеристики регулятора при упругой нагрузке, что в конечном итоге повыщает точностные характеристики прецизионного пьезопривода.
В настоящее время изготовлен лабораторный образец импульсного регулятора перемещения пьезодвигателя, который прощел лабораторные испытания.
Технические характеристики регулятора: точность позиционирования пьезодвигателя 0,02 мкм; диапазон рабочих частот О-1000 Гц; диапазон перемещения пьезодвигателя (-50) -( + 50) мкм; диапазон входных напряжений (-1) - ( + 1) В; диапазон выходных напряжений (-300)- (+300) В.
Экономический эффект изобретения проявляется при использовании импульсного регулятора перемещения пьезодвигателя в автоматических системах фотографирования астрономических объектов в качестве прецизионного пьезопривода фотокассеты, отслеживающего флуктуации атмосферы, и составит более 100 тыс. руб. в год. Проблема компенсации флуктуации атмосферы впервые поставлена академиком В. П. Линником и является одной из наиболее актуальных в астрономии.
Рещение проблемы отслеживания флуктуации атмосферы позволит получить четкие снимки астрономических объектов. В настоящее время годен примерно один из ста сиимков, сделанных вручную, что приводит к непроизводительной работе телескопа и обслуживающего персонала.
Стоимость работы среднего зеркального телескопа 200-300 руб. в час. При работе телескопа в течение 8ч. в сутки потери за счет непроизводительного использования оборудования и получения негодных снимков составляют порядка 1 тыс. руб. Следовательно, при эксплуатации предлагаемого регулятора в телескопе в качестве прецизионного пьезопривода фотокассеты возможно получить экономию в результате сокращения потерь из-за непроизводительного использования оборудования более 100 тыс. руб в год с одновременным получением более качественных снимков астрономических объектов, несущих большое количество информации.
Ожидаемый экономический эффект изобретения проявляется также при применении импульсно-о регулятора в системах управления гибкими зеркалами и в оборудовании микроэлектроники для рентгеновской и электронной литографии за счет повыщения процента выхода годных изделий микроэлектроники, например микросхем за счет повыщения точности позиционирования до 0,02 мкм.
Предлагаемый импульсный регулятор перемещения пьезодвигателя по сравнению с известным имеет в 5 раз более высокую точность позиционирования, в 1,6 раз более щирокую полосу пропускания и более чем в 1,5 раза более высокое быстродействие.
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор перемещения пьезодвигателя (варианты) | 1982 |
|
SU1023278A2 |
| Импульсный регулятор перемещенияпьЕзОдВигАТЕля | 1979 |
|
SU847270A1 |
| Импульсный регулятор перемещения пьезодвигателя | 1986 |
|
SU1363134A1 |
| Устройство управления пьезодвигателем | 1990 |
|
SU1737407A1 |
| Импульсный регулятор положения пьезодвигателя | 1985 |
|
SU1357915A1 |
| Устройство для автоматическогоупРАВлЕНия Об'ЕКТАМи C TPAHC-пОРТНыМ зАпАздыВАНиЕМ | 1979 |
|
SU796789A2 |
| Устройство автоматического управления выемочной машиной | 1986 |
|
SU1352054A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU365686A1 |
| Импульсный регулятор | 1979 |
|
SU960727A2 |
| Релейная система регулирования | 1981 |
|
SU999012A1 |
И/ 1ПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕЩЕНИЯ ПЬЕЗОДВИГАТЕЛЯ по п. 2 авт. св. № 1023278, отличающийся тем, что, с целью повышения точности регулятора, в нем дополнительно установлены фильтр и блок двойного дифференцирования, входом подключенный к выходу усилителя заряда, а выходом через фильтр подключенный к четвертому входу устройства сравнения. сл 00 (U) сл 00 Ю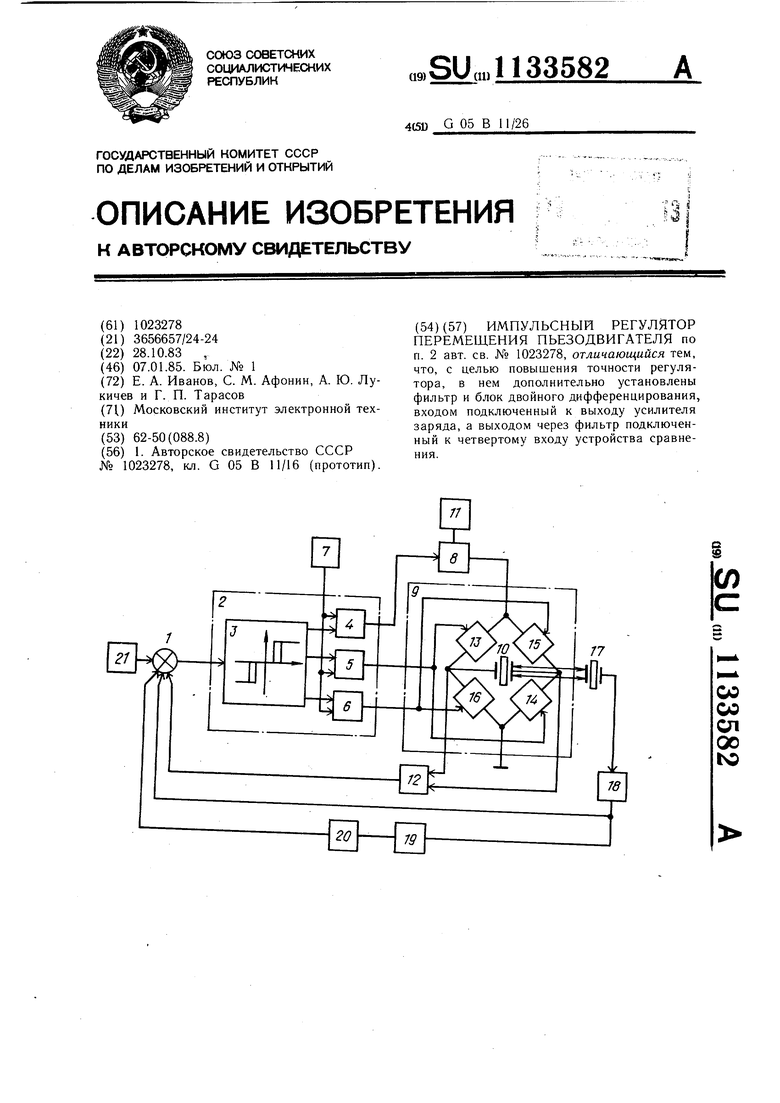
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Импульсный регулятор перемещения пьезодвигателя (варианты) | 1982 |
|
SU1023278A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
