Изобретение относится к авиационному приборостроению и может быть использовано для определения высоты полета летательного аппарата.
Известен способ определения пилотажно-навигационных параметров, использующий в качестве первичного источника измерительной информации электрическое поле Земли, по которому определяют углы крена и тангажа летательного аппарата.
Недостаток известного способа - невозможность определения высоты полета летательного аппарата.
Известен так же способ определения высоты полета летательного аппарата, основанный на измерении разности потенциалов электростатического поля Земли и определении высоты полета летательного аппарата по результату измерения.
Этот способ позволяет определить высоту полета летательного аппарата и является наиболее близким к описываемому изобретению по технической сущности и достигаемому результату.
Способ осуществляют устройством для определения высоты полета летательного аппарата, содержащим два электростатических датчика, расположенных на летательном аппарате на фиксированном расстоянии и соединенных с входами первого дифференциального усилителя, второй дифференциальный усилитель и задатчик.
Недостаток этого способа и реализующего его устройства - малая точность определения высоты полета, обусловленная зависимостью результата измерения от состояния подстилающей поверхности, особенно при полетах на малых высотах (5-50 м).
Цель изобретения - повышение точности определения высоты при полете летательного аппарата на высотах от 5 до 50 м.
Это достигается тем, что в способе определения высоты полета летательного аппарата, основанном на измерении разности потенциалов электростатического поля Земли и определения высоты полета летательного аппарата по результату измерения, дополнительно измеряют градиент потенциала электростатического поля Земли в момент отрыва летательного аппарата от исходной поверхности, запоминают его значение и измеряют текущий градиент электростатического поля Земли, а высоту полета летательного аппарата вычисляют по формуле:
H=  , где Нд - диапазон измеряемых высот полета;
, где Нд - диапазон измеряемых высот полета;
Ео - градиент потенциалов электростатического поля Земли в момент отрыва летательного аппарата от исходной поверх- ности;
Ед - изменение градиента потенциала в выбранном диапазоне высот Нд;
Е - текущий градиент потенциала электростатического поля Земли.
Отличие устройства, позволяющего осуществить новый способ, состоит в том, что в устройство для определения высоты летательного аппарата, содержащее два электростатических датчика, расположенных на летательном аппарате на фиксированном расстоянии и соединенных с входами первого дифференциального усилителя, второй дифференциальный усилитель и задатчик, дополнительно введены третий дифференциальный усилитель, контакт отрыва, ключ, запоминающее устройство, умножитель и делитель, при этом выход первого дифференциального усилителя соединен с входом ключа и инвертирующим входом второго дифференциального усилителя, контакт открыва - с управляющим входом ключа, выход которого через запоминающее устройство подключен к неинвертирующим входам второго и третьего дифференциальных усилителей и к задатчику, первый выход которого соединен с вторым входом умножителя, а второй - с инвертирующим входом третьего дифференциального усилителя, выход второго дифференциального усилителя соединен с первым входом умножителя, выход которого подключен к первому входу делителя, второй вход которого связан с выходом третьего дифференциального усилителя, который является входом устройства, при этом электростатические датчики установлены вдоль вертикальной оси летательного аппарата.
Известно, что зависимость градиента потенциала электрического поля Земли от высоты носит экспоненциальный характер и имеет вид
Е = Ео е-КН , (1) где Ео - градиент потенциала поля у поверхности Земли, В/м;
Н - высота, км;
К - постоянный коэффициент, равный 0,41 км-1.
Известна также эмпирическая формула Швайдкера, полученная по результатам экспериментов
grad ϕ = -E = 90 exp (-3,5H) +
+ 40 exp (-0,23H) , (2) где ϕ - потенциал электростатического поля.
Для диапазона малых высот Нд, например, от 0 до 100 м зависимость (1) градиента потенциала Е от высоты Н с достаточной точностью можно аппроксимировать линейной функцией вида у = а - bx. Так как в этом случае а = Ео; b=  , то формулу для текущего значения градиента потенциала можно записать в виде
, то формулу для текущего значения градиента потенциала можно записать в виде
E= Eо-  H , (3) где Ед - диапазон измерения градиента потенциала в заданном диапазоне изменения высоты;
H , (3) где Ед - диапазон измерения градиента потенциала в заданном диапазоне изменения высоты;
Н - текущее значение высоты;
И для определения высоты летательного аппарата использовать формулу (3), приведенную к виду
H=Hд . (4) Как показывают расчеты, по этой формуле может быть определено значение высоты с достаточной точностью (1%) в диапазоне высот до 100N200 м.
. (4) Как показывают расчеты, по этой формуле может быть определено значение высоты с достаточной точностью (1%) в диапазоне высот до 100N200 м.
В соответствии с оценкой остаточного члена линеаризации зависимости (1) относительная погрешность δ определения высоты Н по линеаризованной формуле (4) имеет вид:
δ=  .
.
При известном ограничении на относительную погрешность допустимый диапазон измерении δоопределяется по формуле
Hд= 
 -1
-1 .
.
При допустимой погрешности δо= 1% допустимое значение Нд = 220 м, при δо= 0,1% - снижается до 74 мм.
Представленные результаты справедливы для случая измерения высоты при нормальных метеоусловиях (отсутствие осадков, грозы, загрязнения атмосферы и т. п. , влияющее на электростатические свойства атмосферы). Отклонение метеоусловий от нормальных будет приводить к появлению дополнительных погрешностей. Это связано с влиянием электрически заряженных облаков и туч на распределение электростатического поля. Поскольку предло- женный способ и устройство предназначены для применения на летательных аппаратах, высота полета которых лежит в пределах 5-50 м, то использование линеаризованной зависимости является вполне допустимым.
При определении высоты в момент отрыва летательного аппарата от исходной поверхности измеряется и запоминается градиент потенциала Ео. Так как суточные изменения градиента потенциала по времени составляет 4-8 ч., т.е. намного больше, чем время полета объектов, на которых предполагается применить предложенный способ 15-30 мин, то влияние суточных вариаций на точность определения высоты будет незначительным.
При этом предложенный способ позволяет измерять высоту относительно исходной поверхности отрыва объекта от Земли, т.е. высоту относительно места взлета с достаточной точностью в диапазоне 5-50 мм.
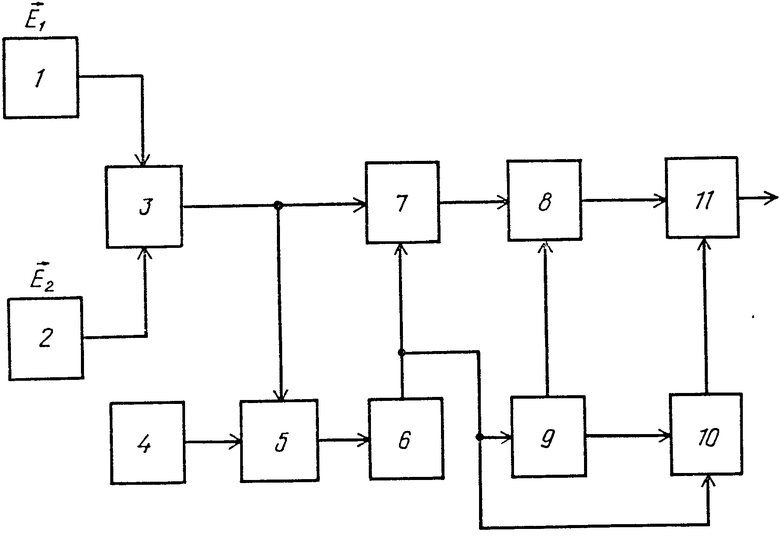
На чертеже представлена схема устройства для определения высоты полета летательного аппарата.
Устройство состоит из электростатических датчиков 1 и 2, первого дифференциального усилителя 3, контакта отрыва 4, ключа 5, запоминающего устройства 6, второго дифференциального усилителя 7, умножителя 8, задатчика 9, третьего дифференциального усилителя 10 и делителя 11.
Датчики 1 и 2 соединены с входами первого дифференциального усилителя 3, выход которого подключен к инверсирующему входу второго дифференциального усилителя 7 и к входу ключа 5, выход которого связан с входом запоминающего устройства 6. Контакт отрыва 4 соединен с управляющим входом ключа 5, выход запоминающего устройства 6 - с инвертирующим входом второго дифференциального усилителя 7, с задатчиком 9 и с неинвертирующим входом третьего дифференциального усилителя 10. Выход второго дифференциального усилителя 7 соединен с первым входом умножителя 8, к второму входу которого подключен первый выход задатчика 9, второй выход которого связан с инвертирующим входом третьего дифференциального усилителя 10, выход которого подключен к второму входу делителя 11. К первому входу делителя 11 подключен выход умножителя 8, а с выхода делителя 11 снимается сигнал, пропорциональный измеряемой высоте.
Устройство работает следующим образом.
В момент отрыва летательного аппарата от исходной поверхности (земли, воды, пусковой установки и т.п.) срабатывает контакт 4, при этом сигнал, пропорциональный разности потенциалов датчиков 1,2, усиленный первый дифференциальным усилителем 3, поступает через ключ 5 на вход запоминающего устройства 6, которое фиксирует градиент потенциала Ео.
По величине Ео в задатчике 8, связанном с выходом запоминающего устройства 6, вычисляются величины Ед и Нд. В следующий момент времени сигнал на выходе первого дифференциального усилителя 3 будет пропорционален текущему градиенту потенциала Е. Второй дифференциальный усилитель 7 сформирует сигнал, пропорциональный разности Ео - Е, так как он подключен входами к выходу первого дифференциального усилителя 3 и к выходу запоминающего устройства 6. Этот сигнал поступит на первый вход умножителя 8, на второй вход которого подается сигнал, пропорциональный Нд с первого выхода задатчика 9. Выходной сигнал умножителя 8, пропорциональный произведению Нд(Ео-Е), поступит на первый вход делителя 11, на втором входе которого имеется сигнал, пропорциональный третьим дифференциальным усилителем 10, который своими входами подключен к выходу запоминающего устройства 6 и ко второму выходу задатчика 9. С выхода дифференциального усилителя 10 снимается сигнал, пропорциональный разности Ео-Ед, в результате на выходе делителя 11 формируется сигнал, пропорциональный измеряемой высоте
H=  .
.
Применение описанного выше способа и устройства для определения высоты полета летательного аппарата позволяют повысить точность определения высоты в пределах 5-50 м за счет исключения влияния подстилающей поверхности на результат измерения.
Способ определения высоты полета летательного аппарата, основанный на измерении разности потенциалов электростатического поля Земли и определении высоты полета летательного аппарата по результату измерения, отличающийся тем, что, с целью повышения точности определения высоты при полете летательного аппарата на высотах от 5 до 50 м, в нем дополнительно измеряют градиент потенциала электростатического поля Земли в момент отрыва летательного аппарата от исходной поверхности, запоминают его значение и измеряют текущий градиент электростатического поля Земли, а высоту полета летательного аппарата вычисляют по формуле
H=  ,
,
где Hд - диапазон измеряемых высот полета;
E0 - градиент потенциала электростатического поля Земли в момент отрыва летательного аппарата от исходной поверхности;
Eд - изменение градиента потенциала в выбранном диапазоне высот Нд;
E - текущий градиент потенциала электростатического поля Земли.
2. Устройство для осуществления способа по п.1, содержащее два электростатических датчика, расположенных на летательном аппарате на фиксированном расстоянии и соединенных с входами первого дифференциального усилителя, второй дифференциальный усилитель и задатчик, отличающееся тем, что в него дополнительно введены третий дифференциальный усилитель, контакт отрыва, ключ, запоминающее устройство, умножитель и делитель, при этом выход первого дифференциального усилителя соединен с входом ключа и инвертирующим входом второго дифференциального усилителя, контакт отрыва - с управляющим входом ключа, выход которого через запоминающее устройство подключен к неинвертирующим входам второго и третьего дифференциальных усилителей и к задатчику, первый выход которого соединен с вторым входом умножителя, а второй с инвертирующим входом третьего дифференциального усилителя, выход второго дифференциального усилителя соединен с первым входом умножителя, выход которого подключен к первому входу делителя, второй вход которого связан с выходом третьего дифференциального усилителя, а электростатические датчики установлены вдоль вертикальной оси летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2107262C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477862C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| СПОСОБ КОНТРОЛЯ ГАЗОВОЙ НЕГЕРМЕТИЧНОСТИ ТВЭЛОВ ЯДЕРНОГО РЕАКТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2069901C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
| Устройство для контроля и сигнализации высоты полета самолета | 1990 |
|
SU1817125A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ОБЪЕКТ | 2007 |
|
RU2348943C1 |
| Способ определения центра масс летательного аппарата и устройство для его осуществления | 2016 |
|
RU2645018C1 |
| МНОГОКАНАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО АЭРОДИНАМИЧЕСКИХ ВНУТРИМОДЕЛЬНЫХ ВЕСОВ | 2011 |
|
RU2469283C1 |
Способ определения высоты полета летательного аппарата, основанный на измерении разности потенциалов электростатического поля Земли и определении высоты полета летательного аппарата по результату измерения, отличающийся тем, что, с целью повышения точности определения высоты при полете летательного аппарата на высотах от 5 до 50 м, в нем дополнительно измеряют градиент потенциала электростатического поля Земли в момент отрыва летательного аппарата от исходной поверхности, запоминают его значение и измеряют текущий градиент электростатического поля Земли, а высоту полета летательного аппарата вычисляют по формуле
H=  ,
,
где Hд - диапазон измеряемых высот полета;
E0 - градиент потенциала электростатического поля Земли в момент отрыва летательного аппарата от исходной поверхности;
Eд - изменение градиента потенциала в выбранном диапазоне высот Нд;
E - текущий градиент потенциала электростатического поля Земли.
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА, ПАРАБОЛА В АЭРОДИНАМИКЕ | 2004 |
|
RU2278058C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
