Изобретение относится к авиационной технике, а именно к способам и устройствам определения центра масс (ЦМ) летательного аппарата (ЛА) в полете. Изобретение позволяет определять в полете величину и направление смещения центра масс аппарата, возникшего из-за нарушения правил его загрузки, самопроизвольного перемещения груза, отказов топливной системы и не симметричной выработки топлива из баков, сброса грузов и т.д.
Существует много различных способов и устройств, позволяющих определить центр масс летательного аппарата. В основном они предназначены для определения центра масс ЛА на Земле. Центр масс, соответствующий состоянию самолета, включая различные варианты загрузки, находят путем расчета аналитическим или графическим методом. Оперативное определение точки нахождения центра масс ЛА в полете непосредственно влияет на безопасность полетов и является требуемой решения актуальной задачей.
Известны способ определения центра масс летательного аппарата и устройство для его осуществления, патент RU 2564375 С1, МПК G01G 19/07, опубл. 27.09.2015, бюл. №27, принятые нами в качестве прототипов.
Известный способ определения центра масс летательного аппарата включает в себя измерение текущих углов тангажа, кажущегося линейного ускорения, абсолютного ускорения в произвольной точке, использование значения ускорения силы тяжести и, на основании полученной совокупности данных, определение центра масс. При этом дополнительно измеряют центростремительные ускорения относительно центра масс в двух фиксированных точках, расположенных вдоль продольной оси аппарата на известном расстоянии друг от друга, посредством акселерометров, установленных в этих точках, один в хвостовой, другой в головной частях фюзеляжа, причем определение центра масс производят в установившемся режиме полета при выполнении маневра типа «змейка».
Устройство, реализующее данный способ, содержит два акселерометра, бортовую навигационную систему, вычитающее устройство, два устройства возведения в степень, три сумматора, два умножителя, задатчик сигнала, соответствующего расстоянию между акселерометрами, блок определения синуса, два масштабирующих устройства с коэффициентами передачи, равными «2», и делитель.
Недостатками данных способа и устройства являются:
- относительно низкая точность определения координат ЦМ из-за слабой величины полезных сигналов в виде центростремительных ускорений для определения центра масс ЛА;
- требование очень чувствительных акселерометров для измерения ЦМ для маломаневренных ЛА из-за малых угловых скоростей при маневрах.
Целью настоящего изобретения является повышение точности измерения координат центра масс ЛА.
Поставленная цель достигается следующим образом.
Согласно заявляемому способу определения центра масс летательного аппарата, основанному на измерении параметров полета аппарата, включающему в себя измерение ускорений относительно центра масс в двух фиксированных точках, расположенных вдоль продольной оси аппарата на известном расстоянии друг от друга, при помощи акселерометров, установленных в этих точках, один в хвостовой, другой в головной частях фюзеляжа, использование значения ускорения силы тяжести и на их основе определение центра масс в установившемся режиме полета при выполнении соответствующего маневра, в качестве измеряемых ускорений относительно центра масс аппарата используют тангенциальные ускорения летательного аппарата, для чего акселерометры устанавливают так, что их оси чувствительности противоположно направлены и параллельны вертикальной оси летательного аппарата, кроме того, дополнительно используют сигнал от бортовой навигационной системы, соответствующий линейному ускорению летательного аппарата относительно вертикальной оси, причем при определении центра масс выполняют поочередно маневры «кабрирование» и «пикирование».
Устройство, реализующее данный способ определения центра масс летательного аппарата, включающее два акселерометра, установленных в фиксированных точках, расположенных вдоль продольной оси аппарата на определенном расстоянии друг от друга, один в хвостовой, другой в головной частях фюзеляжа, бортовую навигационную систему, два сумматора, два умножителя, делитель и вычитающее устройство, дополнительно содержит блок определения косинуса, третий умножитель и второй делитель, при этом акселерометры установлены так, что их оси чувствительности противоположно направлены и параллельны вертикальной оси летательного аппарата, причем выходы акселерометров через первый сумматор подключены к первым входам первого и второго делителей, второй выход первого акселерометра подключен к первому входу первого умножителя, второй вход которого соединен с задатчиком сигнала, пропорционального расстоянию между акселерометрами, подключенным к первому входу третьего умножителя, выход первого умножителя через первый делитель подключен к первому входу второго сумматора, ко второму входу которого через последовательно соединенные второй умножитель, вычитающее устройство, третий умножитель и второй делитель подключен выход блока определения косинуса, вход которого соединен с первым выходом бесплатформенной навигационной системы по сигналу угла тангажа, второй выход которой по сигналу ускорения силы тяжести подключен ко второму входу второго умножителя, а третий выход по сигналу вертикального ускорения летательного аппарата подключен ко второму входу вычитающего устройства, при этом выходом устройства является выход второго сумматора, на котором формируется сигнал, соответствующий расстоянию от первого акселерометра до центра масс ЛА.
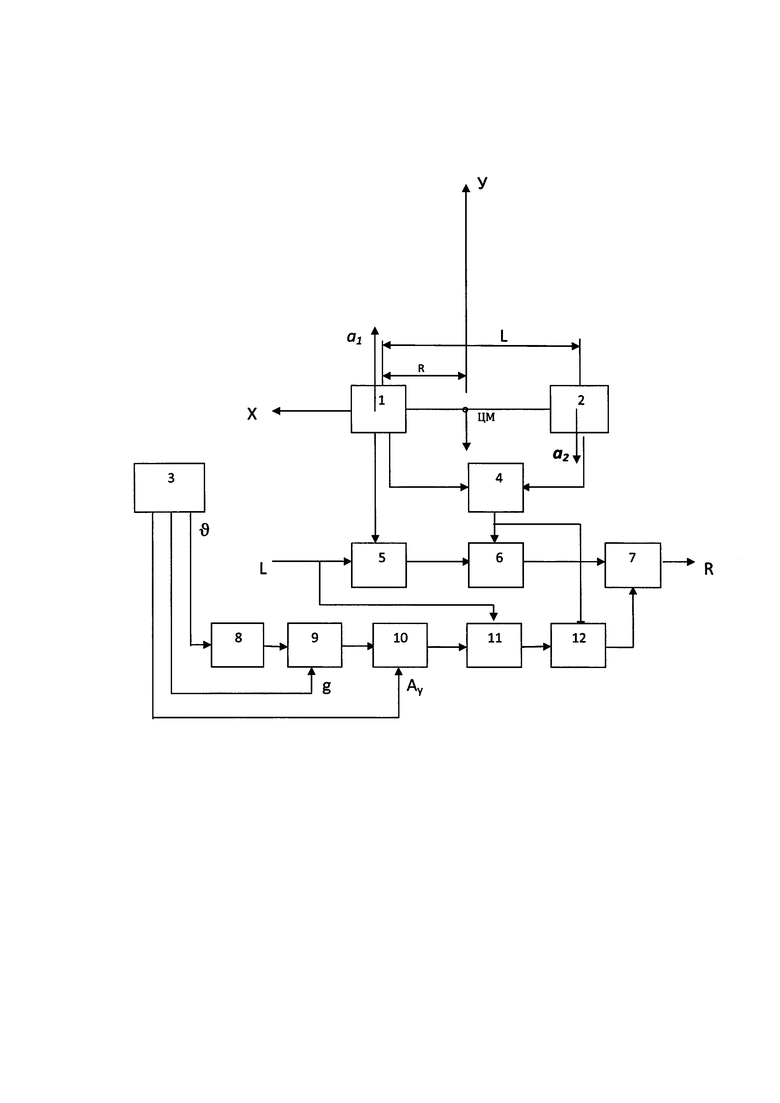
Сущность изобретения поясняется чертежом, на котором представлена структурная схема заявляемого устройства для определения центра масс летательного аппарата.
Устройство включает в себя акселерометры 1 и 2, оси чувствительности которых противоположно направлены, бортовую навигационную систему 3, первое суммирующее устройство 4, первый умножитель 5, к первому входу которого подключен задатчик сигнала (не показан), соответствующего расстоянию L между акселерометрами 1 и 2, первый делитель 6, второй сумматор 7. Кроме того, устройство содержит последовательно соединенные блок 8 определения косинуса, второй умножитель 9, вычитающее устройство 10, третий умножитель 11 и второй делитель 12, выход которого подключен ко второму входу второго сумматора 7. Выход второго сумматора является выходом устройства.
Согласно заявленному способу определения центра масс (ЦМ) летательного аппарата измеряют тангенциальные ускорения a1, а2 относительно ЦМ масс акселерометрами 1 и 2, установленными в фиксированных точках, расположенных вдоль продольной оси аппарата на определенном расстоянии L друг от друга, первый 1 в головной части фюзеляжа, второй 2 в хвостовой. Оси чувствительности акселерометров направлены вдоль перпендикулярной к плоскости ЛА оси и совпадают со связанной осью самолета OY.
Измерение тангенциальных ускорений a1, a2 и определение ЦМ производят в процессе поочередного выполнения ЛА маневров «кабрирование» и «пикирование».
При определении ЦМ используют полученные из бортовой навигационной системы 3 ЛА измеренные значения угла тангажа  , линейного ускорения Ау вдоль связанной оси Y в реальном масштабе времени и вычисленное в вычислителе бортовой навигационной системы 3 значение g ускорения силы тяжести для текущих параметров полета.
, линейного ускорения Ау вдоль связанной оси Y в реальном масштабе времени и вычисленное в вычислителе бортовой навигационной системы 3 значение g ускорения силы тяжести для текущих параметров полета.
Таким образом, полученные из установленных акселерометров 1, 2 и от бортовой навигационной системы 3 параметры полета самолета и используемые определенные соотношения между ними, приведенные ниже, позволяют определить координаты ЦМ ЛА.
Из уравнения вращательно-поступательного движения измеряемые акселерометрами проекции кажущегося ускорения на оси чувствительных элементов имеют следующий вид:

где N - номер акселерометра;
 - составляющие центростремительного ускорения;
- составляющие центростремительного ускорения;
 - составляющие тангенциального ускорения;
- составляющие тангенциального ускорения;
 - вектор ускорения силы тяжести;
- вектор ускорения силы тяжести;
 - вектор линейных ускорений;
- вектор линейных ускорений;
 - вектор угловых скоростей,
- вектор угловых скоростей,
 - вектор проекций (косинусы угла) осей чувствительности i-го акселерометра на оси связанной системы координат,
- вектор проекций (косинусы угла) осей чувствительности i-го акселерометра на оси связанной системы координат,  ;
;
 - вектор проекции расстояния от центра масс до i-го акселерометра,
- вектор проекции расстояния от центра масс до i-го акселерометра,
Тогда из (1) найдем проекции ускорений и угловых скоростей на ось Y для обоих акселерометров 1 и 2:


С учетом того, что  и курс ЛА не меняется, ωy=0,
и курс ЛА не меняется, ωy=0,
где  - угол тангажа ЛА,
- угол тангажа ЛА,

Полученные значения R за N измерений усредняются.
Из полученного выражения (3) следует, что центровку можно определить при наличии сигналов акселерометров a1 и а2. Как показывают расчеты, наибольшую точность можно получить, если измерения проводить при чередовании маневров «кабрирование» и «пикирование».
Реализация способа может быть осуществлена с помощью устройства, описанного выше, в котором в качестве акселерометров могут быть использованы как микромеханические датчики (для ЛА интенсивного маневрирования), так и высокоточные датчики (для маломаневренных ЛА). В качестве входных сигналов устройства могут быть использованы выходные сигналы бортовых навигационных комплексов или курсовертикали, а вычислительная часть устройства может быть выполнена на стандартных элементах вычислительной техники.
Таким образом, заявленные способ и устройство просты в реализации и применении, обладают более высокой точностью и могут быть использованы на всех типах ЛА для определения координат местоположения центра масс ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРА МАСС ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564375C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНОГО АППАРАТА | 2012 |
|
RU2493578C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТРОИТЕЛЯ ВЕРТИКАЛИ И ДАТЧИКОВ СКОРОСТЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2187141C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС БЕСПИЛОТНОГО ВЕРТОЛЕТА | 2021 |
|
RU2767969C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС САМОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570339C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ | 2014 |
|
RU2579551C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| СПОСОБ ЗАЩИТЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ОТ УПРАВЛЯЕМЫХ РАКЕТ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2280836C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
Изобретения относятся к авиационной технике, а именно к способам и устройствам определения центра масс (ЦМ) летательного аппарата (ЛА) в полете. Способ основан на измерении параметров полета ЛА, включает в себя измерение ускорений относительно ЦМ в двух фиксированных точках, расположенных вдоль продольной оси ЛА на известном расстоянии друг от друга, при помощи акселерометров, установленных в этих точках, один в хвостовой, другой в головной частях фюзеляжа, использование значения ускорения силы тяжести и на их основе определение ЦМ в установившемся режиме полета при выполнении соответствующего маневра. В качестве измеряемых ускорений относительно ЦМ ЛА используют тангенциальные ускорения ЛА, для чего акселерометры устанавливают так, что их оси чувствительности противоположно направлены и параллельны вертикальной оси ЛА. Дополнительно используют сигнал от бортовой навигационной системы, соответствующий линейному ускорению ЛА относительно вертикальной оси, причем при определении центра масс выполняют поочередно маневры «кабрирование» и «пикирование». Устройство для осуществления способа включает в себя два акселерометра, бортовую навигационную систему, два суммирующих устройства, три умножителя, два делителя, блок определения косинуса и вычитающее устройство, соединенные между собой определенным образом. Технический результат заключается в упрощении реализации и применения, повышении точности измерений координат местоположения ЦМ ЛА. 2 н.п. ф-лы, 1 ил.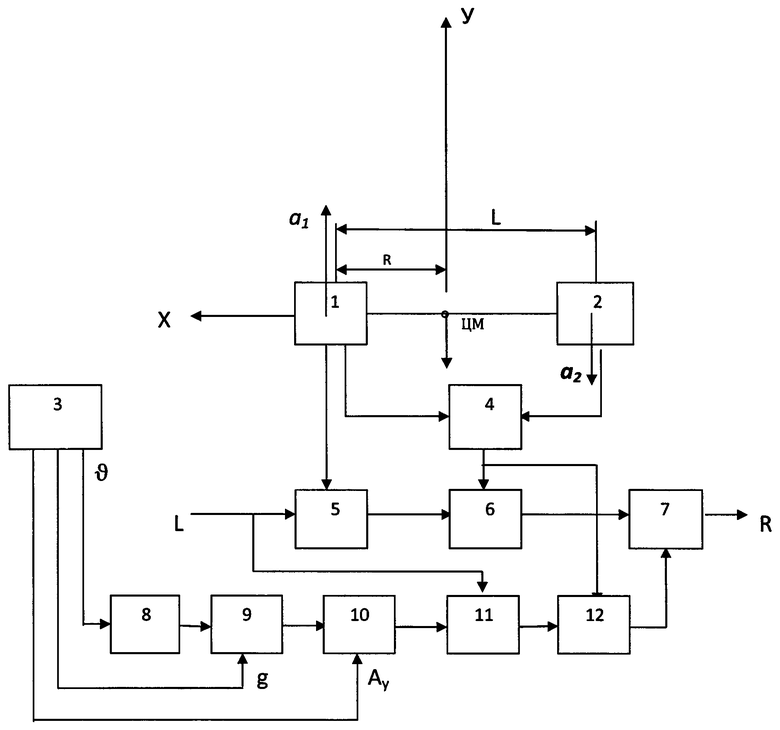
1. Способ определения центра масс летательного аппарата, основанный на измерении параметров полета аппарата, включающий в себя измерение ускорений относительно центра масс в двух фиксированных точках, расположенных вдоль продольной оси аппарата на известном расстоянии друг от друга, при помощи акселерометров, установленных в этих точках, один в хвостовой, другой в головной частях фюзеляжа, использование значения ускорения силы тяжести и на их основе определение центра масс в установившемся режиме полета при выполнении соответствующего маневра, отличающийся тем, что в качестве измеряемых ускорений относительно центра масс аппарата используют тангенциальные ускорения летательного аппарата, для чего акселерометры устанавливают так, что их оси чувствительности противоположно направлены и параллельны вертикальной оси летательного аппарата, кроме того, дополнительно используют сигнал от бортовой навигационной системы, соответствующий линейному ускорению летательного аппарата относительно вертикальной оси, причем при определении центра масс выполняют поочередно маневры «кабрирование» и «пикирование».
2. Устройство определения центра масс летательного аппарата, включающее два акселерометра, установленных в фиксированных точках, расположенных вдоль продольной оси аппарата на определенном расстоянии друг от друга, один в хвостовой, другой в головной частях фюзеляжа, бортовую навигационную систему, два сумматора, два умножителя, делитель и вычитающее устройство, отличающееся тем, что оно дополнительно содержит блок определения косинуса, третий умножитель и второй делитель, при этом акселерометры установлены так, что их оси чувствительности противоположно направлены и параллельны вертикальной оси летательного аппарата, причем выходы акселерометров через первый сумматор подключены к первым входам первого и второго делителей, второй выход первого акселерометра подключен к первому входу первого умножителя, второй вход которого соединен с задатчиком сигнала, пропорционального расстоянию между акселерометрами, подключенным к первому входу третьего умножителя, выход первого умножителя через первый делитель подключен к первому входу второго сумматора, ко второму входу которого через последовательно соединенные второй умножитель, вычитающее устройство, третий умножитель и второй делитель подключен выход блока определения косинуса, вход которого соединен с первым выходом бесплатформенной навигационной системы по сигналу угла тангажа, второй выход которой по сигналу ускорения силы тяжести подключен ко второму входу второго умножителя, а третий выход по сигналу вертикального ускорения летательного аппарата подключен ко второму входу вычитающего устройства, при этом выходом устройства является выход второго сумматора, на котором формируется сигнал, соответствующий расстоянию от первого акселерометра до центра масс ЛА.
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРА МАСС ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564375C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| CN 105814416 A, 27.07.2016. | |||

