Изобретение относится к технике использования гидравлического одноковшового экскаватора на земляных работах для отрывки грунта и точной зачистки поверхности земляного сооружения с повышенной производительностью.
Известен способ копания, включающий предварительную выборку грунта и зачистку с той же стоянки экскаватора, осушествляемый устройством, содержашим базовую машину и смонтированное на ней рабочее оборудование, включаюш,ее стрелу, рукоять, ковш, гидроцилиндры их управления, гидрораспределители, управляющую связь, содержашую датчики положения элементов рабочего оборудования, связанные между собой гибким элементом, выполненным в виде тросами копирное устройство 1.
Однако во время зачистки грунта угол резания ковша меняется в больших пределах, что снижает качество земляной поверхности.
Кроме того, система управления рабочим оборудованием сложна и экскаватор обладает невысокой производительностью.
Наиболее близким к изобретению является способ копания одноковшовым гидравлическим экскаватором, включающий выборку грунта и зачистку обрабатываеемой поверхности движением рабочего органа с режущей кромкой и гидроцилиндром управления с автоматическим обеспечением прямолинейной траектории.
Устройство для осуществления способа включает базовую машину и смонтированное на ней рабочее оборудование, содержащее стрелу, рукоять, рабочий орган с плоской опорной поверхностью, гидроцилиндры их управления с гидрораспределителями и гидромагистралями, управляющую связь с рычагом 2.
Однако на существующих гидравлических экскаваторах, как правило, используется двухсекционная силовая насосная установка. При включении одновременно двух гидрораспределителей, как это происходит при работе известного устройства, рабочая жидкость от одного насоса поступает в ведущий .гидроцилиндр привода рукоятки, а поток от второго насоса идет в отслеживающий исполнительный гидроцилиндр ковша. Гидроцилиндр стрелы находится в плавающем положении. Таким образом, время цикла планировки, а следовательно, и производительность экскаватора на точных земляных работах определяется производительностью одного насоса. Кроме того, устройство достаточно сложно, поскольку требует дополнительного следящего двухкромочного гидрораспределителя и систему подвода рабочей жидкости к этому гидрораспределителю.
Цель изобретения - повышение производительности на планировочных и зачистных работах и упрощение конструкции экскаватора.
Эта цель достигается тем, что согласно способу копания одноковшовым гидравличес5 КИМ экскаватором, включающему выборку грунта и зачистку обрабатываемой поверхности движением рабочего органа с режущей кромкой и гидроцилиндром: управления с автоматическим обеспечением прямолинейной траектории, сохранение последней обес печивают поворотом рабочего органа отноcиteльнo рукояти под действием сил сопротивлений копанию, действующих на режущую кромку, а скорость поворота регулируют дросселированием рабочей жидкости 5 из поршневой полости гидроцилиндра привода рабочего органа на слив.
Устройство для осуществления способа, включающее базовую машину и смонтированное на ней рабочее оборудование, содержащее стрелу, рукоять, рабочий орган 0 с плоской опорной поверхностью, гидроцилиндры их управления с гидрораспределителями, управляющую связь с рычагом, снабжено однокромочным регулируемым дросселем, установленным в магистрали, соединяющей порщневую полость гидроцилиндра привода рабочего органа со сливом с приводом от рычага управляющей связи, и дополнительным двухпозиционным гидрораспределителем, соединяющим обе полости гидроцилиндра привода рабочего органа с регулиQ руемым дросселем.
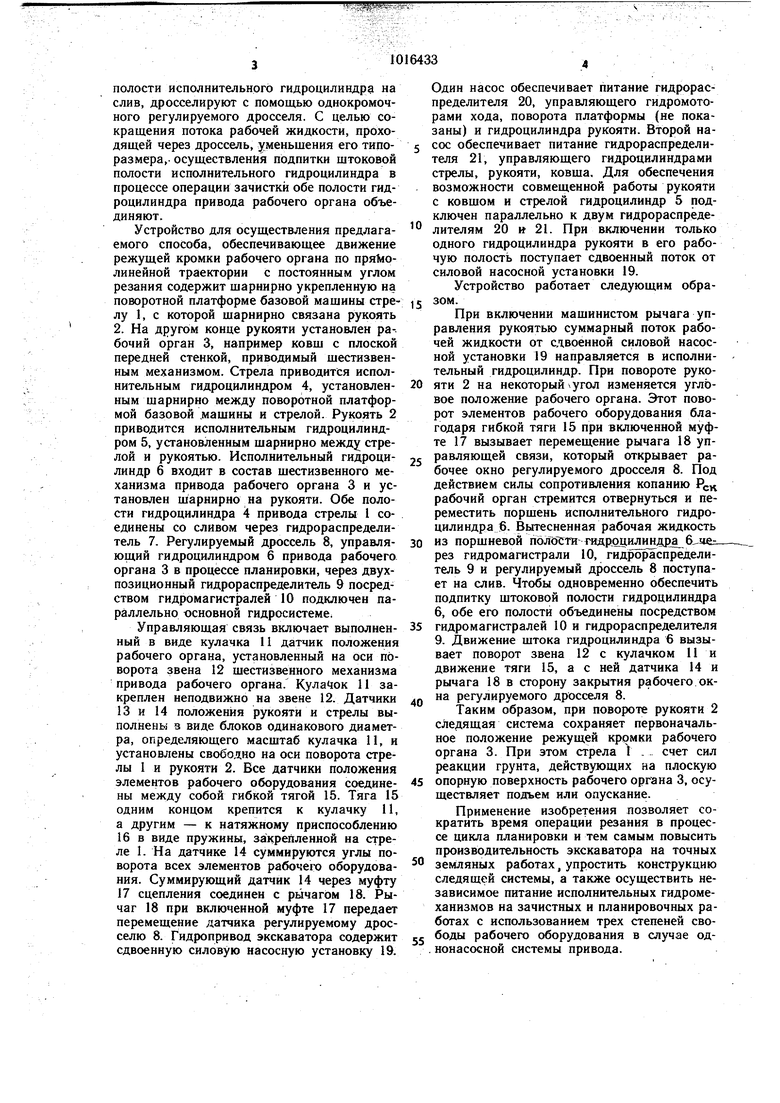
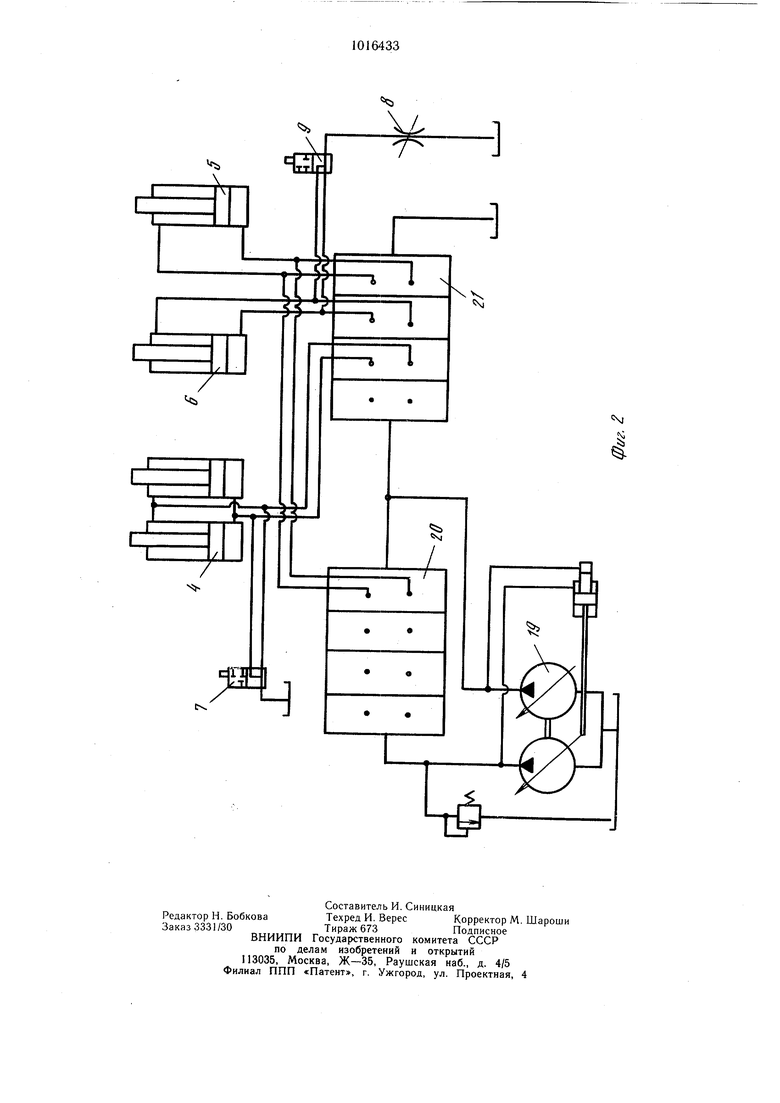
На фиг. I изображена принципиальная схема устройства для осуществления способа; на фиг. 2 - гидросхема экскаватора. Способ заключается в следующем. Отрывку грунта до заданного уровня ве5 дуг поворотом рукояти или рабочего органа, например ковща, обычным способом. После того, как вынут основной объем грунта, проводят окончательную зачистку до проектной отметки. Для этого устанавливают плоскую грань режущей части рабочего органа касательно к заданной прямолинейной поверхности земляного сооружения, создают прижим плоской грани к грунту и перемещают рабочий орган по траектории, сохраняя значение заданного угла по всей 5 траектории, для чего используют систему автоматической стабилизации углового положения рабочего органа.
При движении рабочего органа по траектории на его режущую кромку действует сила сопротивления копанию 1 , возникающая за счет сил резания и сил трения рабочего органа о грунт. Эта сила стремится отвернуть рабочий орган и создает избыточное давление в поршневой полости исполнительного гидроцилиидра. Поскольку движение рабочего органа в процессе операции зачистки не реверсируется, то для регулирования скорости его движения рабочую жидкость, поступающую из поршневой
полости исполнительного гидроцилиндра на слив, дросселируют с помощью однокромочного регулируемого дросселя. С целью сокращения потока рабочей жидкости, проходящей через дроссель, уменьшения его типоразмера,- осуществленИ Я подпитки штоковой полости исполнительного гидроцилиндра в процессе операции зачистки обе полости гидроцилиндра привода рабочего органа объединяют.
Устройство для осуществления предлагаемого способа, обеспечивающее движение режущей кромки рабочего органа по пряЫолинейной траектории с постоянным углом резания содержит шарнирно укрепленную на поюротной платформе базовой мащины стрелу 1, с которой щарнирно связана рукоять 2. На другом конце рукояти установлен ра-. бочий орган 3, например ковш с плоской передней стенкой, приводимый шестизвенным механизмом. Стрела приводится исполнительным гидроцилиндром 4, установленным щарнирно между поворотной платформой базовой .машины и стрелой. Рукоять 2 приводится исполнительным гидроцилиндром 5, установленным шарнирно между стрелой и рукоятью. Исполнительный гидроцилиндр б входит в состав шестизвенного механизма привода рабочего органа 3 и установлен шарнирно на рукояти. Обе полости гидроцилиндра 4 привода стрелы I соединены со сливом через гидрораспределитель 7. Регулируемый дроссель 8, управляющий гидроцилиндром 6 привода рабочего органа 3 в процессе планировки, через двухпозиционный гидрораспределитель 9 посредством гидромагистралей 10 подключен параллельно основной гидросистеме.
Управляющая связь включает выполненный в виде кулачка И датчик положения рабочего органа, установленный на оси поворота звена 12 шестизвенного механизма привода рабочего органа. Кулачок 11 закреплен неподвижно на звене 12. Датчики 13 и 14 положения рукояти и стрелы выполнены 3 виде блоков одинакового диаметра, определяющего масштаб кулачка 11, и установлены свободно на оси поворота стрелы 1 и рукояти 2. Все датчики положения элементов рабочего оборудования соединены между собой гибкой тягой 15. Тяга 15 одним концом крепится к кулачку 11, а другим - к натяжному приспособлению
16в виде пружины, закрепленной на стреле I. На датчике 14 суммируются углы поворота всех элементов рабочего оборудования. Суммирующий датчик 14 через муфту
17сцепления соединен с рычагом 18. Рычаг 18 при включенной муфте 17 передает перемещение датчика регулируемому дросселю 8. Гидропривод экскаватора содержит сдвоенную силовую насосную установку 19.
Один насос обеспечивает питание гидрораспределителя 20, управляющего гидромоторами хода, поворота платформы (не показаны) и гидроцилиндра рукояти. Второй насос обеспечивает питание гидрораспределителя 21, управляющего гидроцилиндрами стрелы, рукояти, ковша. Для обеспечения возможности совмещенной работы рукояти с ковщом и стрелой гидроцилиндр 5 подключен параллельно к двум гидрораспределителям 20 21. При включении только одного гидроцилиндра рукояти в его рабочую полость поступает сдвоенный поток от силовой насосной установки 19.
Устройство работает следующим образом.
При включении машинистом рычага управления рукоятью суммарный поток рабочей жидкости от сдвоенной силовой насосной установки 19 направляется в исполнительный гидроцилиндр. При повороте рукояти 2 на некоторый угол изменяется угловое положение рабочего органа. Этот поворот элементов рабочего оборудования благодаря гибкой тяги 15 при включенной муфте 17 вызывает перемещение рычага 18 управляющей связи, который открывает рабочее окно регулируемого дросселя 8. Под действием силы сопротивления копанию Р., рабочий орган стремится отвернуться и переместить поршень исполнительного гидроцилиндра 6. Вытесненная рабочая жидкость
из поршневой полот ти гидр,оц,или1нщ),ле: рез гидромагистрали 10, гидрора спре; 1елитель 9 и регулируемый дроссель 8 поступает на слив. Чтобы одновременно обеспечить подпитку штоковой полости гидроцилиндра 6, обе его полости объединены посредством гидромагистралей 10 и гидрораспределителя 9. Движение штока гидроцилиидра 6 вызывает поворот звена 12 с кулачком 11 и движение тяги 15, а с ней датчика 14 и рычага 18 в сторону закрытия рабочего окна регулируемого дросселя 8.
Таким образом, при повороте рукояти 2 следящая система сохраняет первоначальное положение режущей кромки рабочего органа 3. При этом стрела Y . счет сил реакции грунта, действующих на плоскую
опорную поверхность рабочего органа 3, осуществляет подъем или опускание.
Применение изобретения позволяет сократить время операции резания в процессе цикла планировки и тем самым повысить производительность экскаватора на точных
зешяных работах, упростить конструкцию следящей системы, а также осуществить независимое питание исполнительных гидромеханизмов на зачистных и планировочных работах с использованием трех степеней свободы рабочего оборудования в случае од.нонасосной системы привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод экскаватора | 1981 |
|
SU1028792A1 |
| Рабочее оборудование гидравлического одноковшового экскаватора | 1969 |
|
SU626168A1 |
| Рабочее оборудование одноковшового экскаватора | 1979 |
|
SU777164A1 |
| Рабочее оборудование гидравлического экскаватора | 1984 |
|
SU1173011A1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| Гидравлический экскаватор | 1986 |
|
SU1370190A1 |
| Гидропривод управления рабочим оборудованием гидравлического экскаватора | 1988 |
|
SU1546574A1 |
| Механизм управления гидравлическим экскаватором | 1982 |
|
SU1027352A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2010 |
|
RU2450106C1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
1. Способ копания одноковшовым гидравлическим экскаватором, включающий выборку грунта и зачистку обрабатываемой поверхности движением рабочего органа с режущей кромкой и гидроцилиндром управления с автоматическим обеспечением прямолинейной траектории, О7личаюы4ыйся тем, 4to, с целью повышения производительноctH на планировочных и зачистных работах и упрощения конструкции экскаватора. сохранение прямолинейной траектории обеспечивают поворотом рабочего органа относительно рукояти под действием сил сопротивления копанию, действующих на режущую кромку, а скорость поворота регулируют дросселированием рабочей жидкости из порщневой полости гидроцилиндра привода рабочего органа на слив. 2. Одноковшовый гидравлический экскаватор, включающий базовую машину и смонтированное на ней рабочее оборудование, содержащее стрелу, рукоять, рабочий орган с плоской опорной поверхностью, гидроцилиндры их управления с гидрораспределителями и гидромагистралями, управляющую связь с рычагом, отличающийся тем, что, с целью повышения производительности на планировочных и зачистных работах и упрощения конструкции, он снабжен однокромоч(Л ным регулируемым дросселем, установленным в магистрали, соединяющей поршневую полость гидроцилиндра привода рабочего органа со сливом с приводом от рычага управляющей связи, и дополнительным двухпозиционным гидрораспределителем, соединяющим обе полости гидроцилиндра привода рабочего органа с регулируемым дросселем. О5 4; со со //
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 0 |
|
SU219457A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
