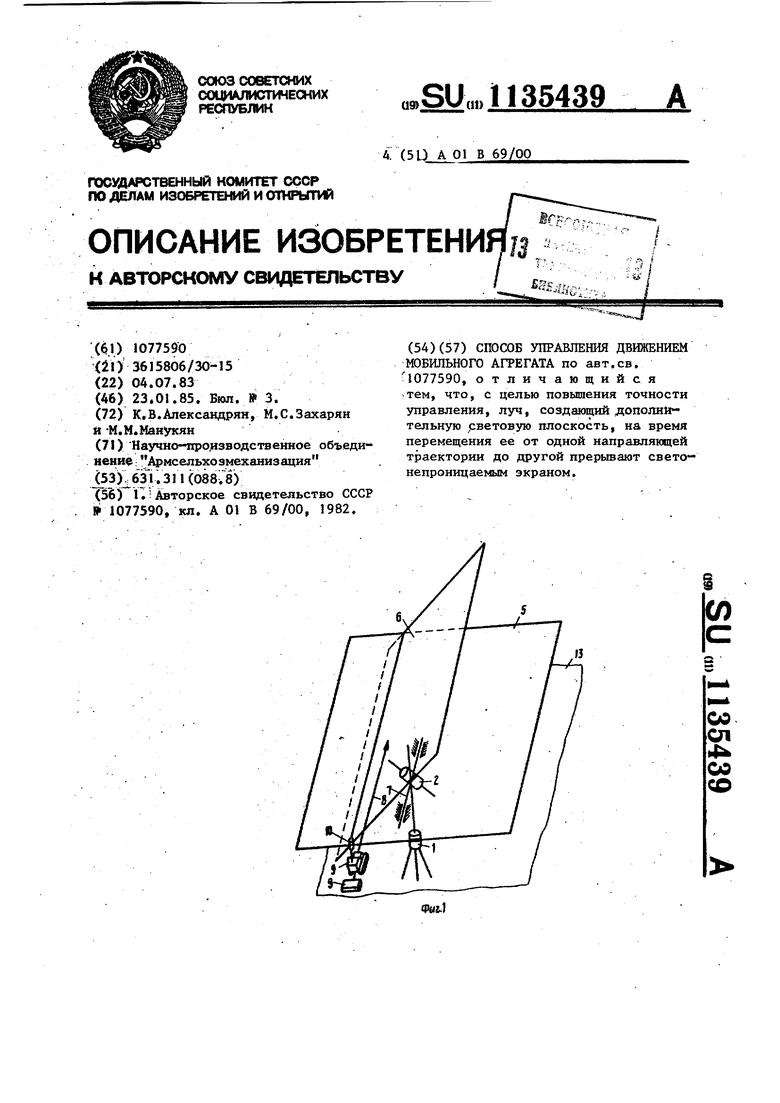
1 Изобретение относится к сельско хозяйству, в частности к способам управления движением мобильных агрегатов j и может быть использовано для вождения их по прямым параллел ным траекториям. По основному авт.св. № 1077590 и вестен способ управления движением мобильного, агрегата, включающий создание в пространстве опорной световой плоскости путем вращения вокруг ocHj расположенной наклонно в плоскости, перпендикулярной направлению движения агрегата, светового луча, видимая линия пересечен которого с поверхностью земли парал лельна продольной оси агрегата, при этом создают дополнительную световую плоскость путем вращения дополнительного светового луча вертикальной оси и по сигналу рассогл сования- обоих лучей осуществляют корректировку направления движений причем дополнительному световому лучу сообщают параметры несущего сигнала, отличные от параметров основного светового луча СОЦель изобретения - повьшение точности управления движением мобильного агрегата. Цель изобретения достигается тем, что луч, создающий дополнител яую световую плоскость, на время . перемещения ее от одной направлякщей траектории до другой прерывают светонепроницаемым экраном. На фиг,1 представлен вариант реализации способа; на фиг.2 - схе ма корректировки направления движе ния и прерьтвания луча, создающего дополнительную световую плоскость. Способ реализуется при помощи механизмов 1 и 2 для вращения лазер ных излучателей 3 и 4 вокруг осей перпендикулярных основной 5 и дополнительной 6 плоскостям, при этом механизм 2 установлен над механизмом 1 и имеет ось 7, параллельную прямолинейной траектории 8 движения сельскохозяйственной машины 9, перемещающейся на поле, а фотоприeMHbie устройства 10 и 11 с блоками управления установлены на сельскохозяйственных мапшнах. Различные положения лазерного луча обозначены ОД, ОД , ОД. Свето непронидаемьй экран 12 установлен ;перед излучателем 4, который может 1занимать положения 4 и 4 в прост392ранстве. Агрегаты перемещаются по 13. .-. Способ осуществляется следзтодим образом. . Вращают лазерные лучи с помощью механизмов 1 и 2, установленных ,, над поверхностью поля, и создают основную 5 и дополнительную 6 плос- ости (фиг.1). Семейство параллельных прямых, полученных в результате пересечения с основной 5 световой плоскостью дополнительной 6 световой плоскости, создаваемых в пространстве излучателями 3 и 4 (фиг.2) путем вращения лазерных- лучей ОД и АВ (фиг.2) с помощью механизмов 2 и 1 (фиг.1), служит направляющими для корректировки движениягруппы машин по прямым линиям. Причем для каждой машины в отдельности направляющей служит одна прямая (фиг.I). Принятые фотоприемными устройствами 10 и 11 сигналы обрабатьшают и по ним корректируют направление движения машин в зависимости от того, как подают лучи на фотоприемные 10 и 1 устройства. Если лучи от обоих световых плоскостей 5 и 6 падают на среднюю часть фотоприемного устройства 10 (фиг.1), ТО это значит, что машина 9 движется по требуемой траектории 8 и ее направление движения не требует корректировки. При отклонении от требуемой траектории 8 (фиг.1) влево или вправо лучи от дoпoлниteльнoй 6 плоскости падают соответственно на нижнкяо или верхнюю части фотоприемного устройства 10, При этом по сигналу рассогласования вырабатывают соответствующий сигнал управления. Дпя получения семейства направлякяцих параллельных прямых излучатель 4 (фиг.2) имеет возможность дискретного поворота на угол to-,. . где Ч - угол поворота дополнительной 6 плоскости от нормали к опорной 5 плоскости; Ъ - требуемое расстояние между траекториями; с - постоянная; л-±1;2;3;...- порядковый номер траекторий; а - расстояние опорной 5 плоскости до оси 7 поворота дополнительной 6 плоскости (фиг.2). 3 В месте пересечения основной 5 и дополнительной плоскостей 6 созда ется линия, параллельная требуемой прямолинейной траектории движения 8 Установленное на сельскохозяйствен- ной машине 9 фотоприемное устройство 10 находится в области пересечения этих двух плоскостей, В процессе поворота излучателя на угол / луч, создающий дополнитель ную 6 световую плоскость в пространстве, прерывают, устанавливая перед излучателем 4 .светонепроницаемый экран 12 (фиг.2), После завершения поворота излучателя 4 на угол oL светонепроницаемый экран 12 убирают 39 и в пространстве вновь создают дополнительную 6 световую плоскость, необходимую для получения направлякгшей п траектории. Прерыванием в пространстве луча, создающего дополнительную 6 световую плоскость, предотвращают поступление ложных сигналов рассогласования от фотоприемного устройства 10 в процессе поворота ее на угол ot. Применение данного способа позволяет значительно повысить точность управления мобильных агрегатов, что улучшает качество технологических процессов, осуществляемых этими агрегатами.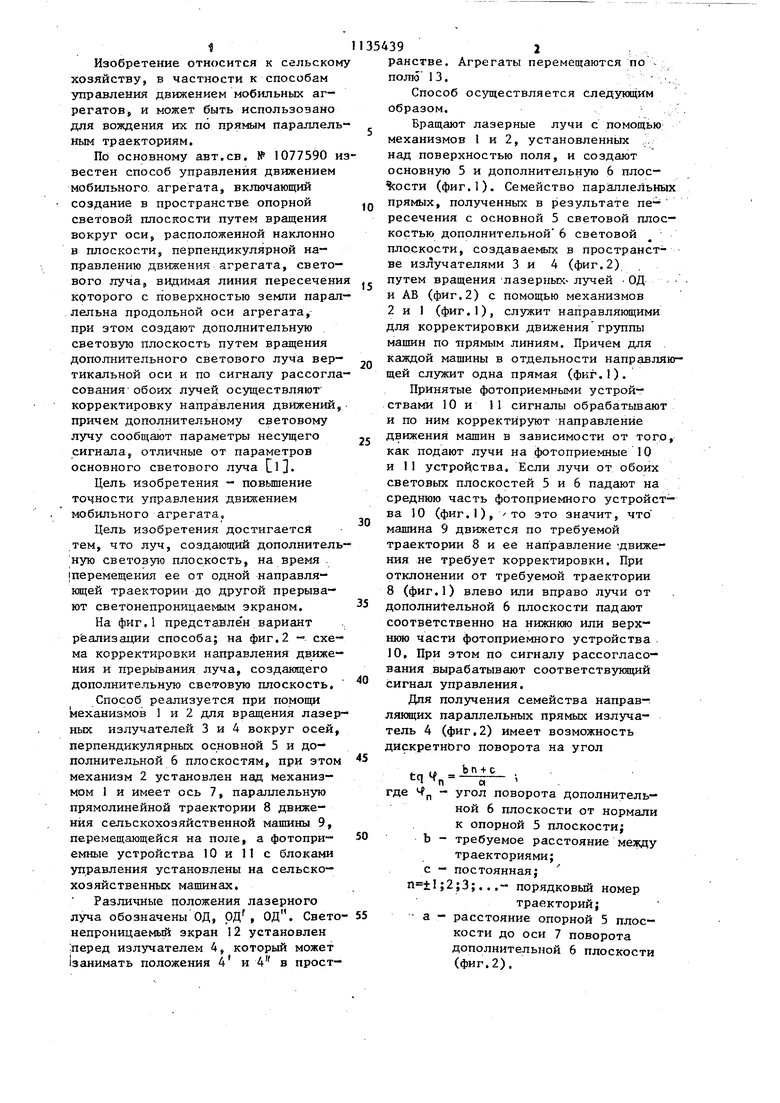
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением мобильного агрегата | 1987 |
|
SU1477272A2 |
| Способ управления движением мобильного агрегата | 1981 |
|
SU1077590A1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДОРОЖНЫХ МАШИН | 1995 |
|
RU2100521C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НА РАБОЧЕЙ ПЛОЩАДКЕ | 1991 |
|
RU2014417C1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2009 |
|
RU2397115C1 |
| Способ адаптивного сканирования подстилающей поверхности лучом лазерного локатора в режиме информационного обеспечения маловысотного полета | 2016 |
|
RU2706912C2 |
| СПОСОБ ОРИЕНТАЦИИ ПО ЛАЗЕРНОМУ ЛУЧУ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2602290C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОЙ ПОСАДОЧНОЙ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2494932C1 |
| Система управления курсом движения землеройных машин | 1989 |
|
SU1647092A1 |
СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО АГРЕГАТА по авт.св. 1077590, отличающийся гтем, что, с целью повышения точности управления, луч, создающий дополнительную цветовую плоскость, на время перемещения ее от одной направляющей траектории до другой прерывают светонепроницаемым экраном. (Л а со СП 4i ОО СО