Изобретение относится к управлению движением мобильных машинно-тракторных агрегатов и является усовершенствованием изобретения по авт. св. № 1077590.
Цель изобретения - расширение функциональных возможностей способа управления движением мобильного агрегата путем дополнительного определения его продольной координаты.
10
20
25
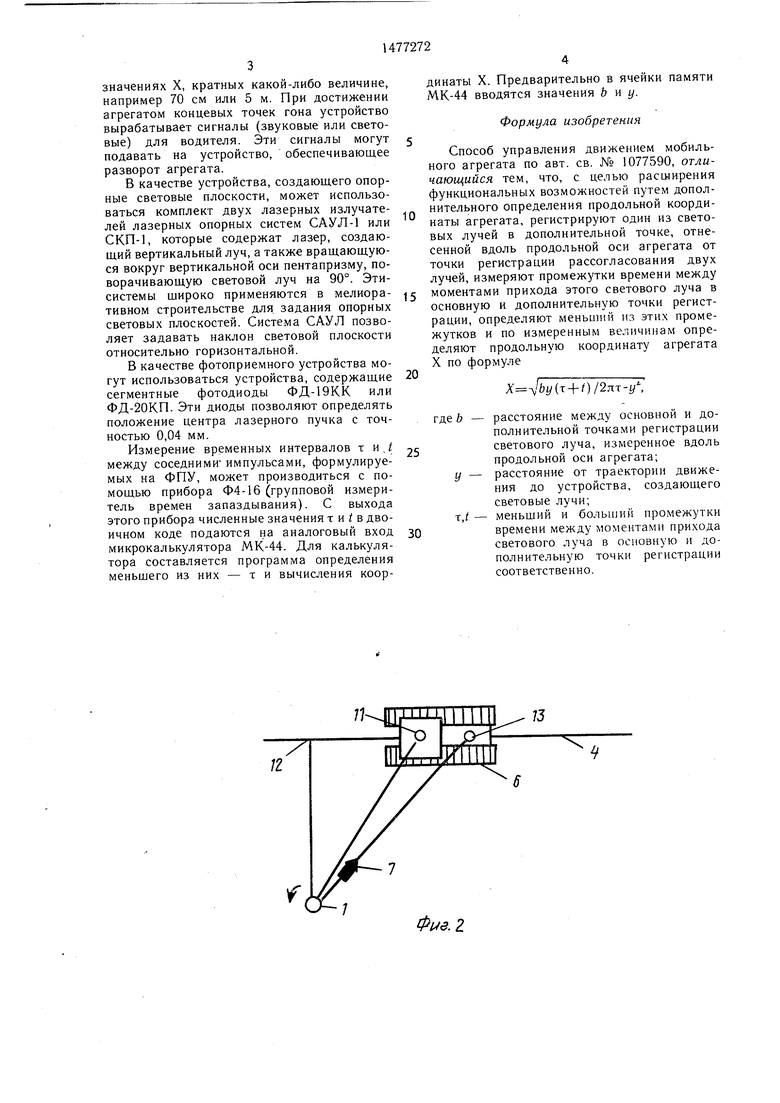
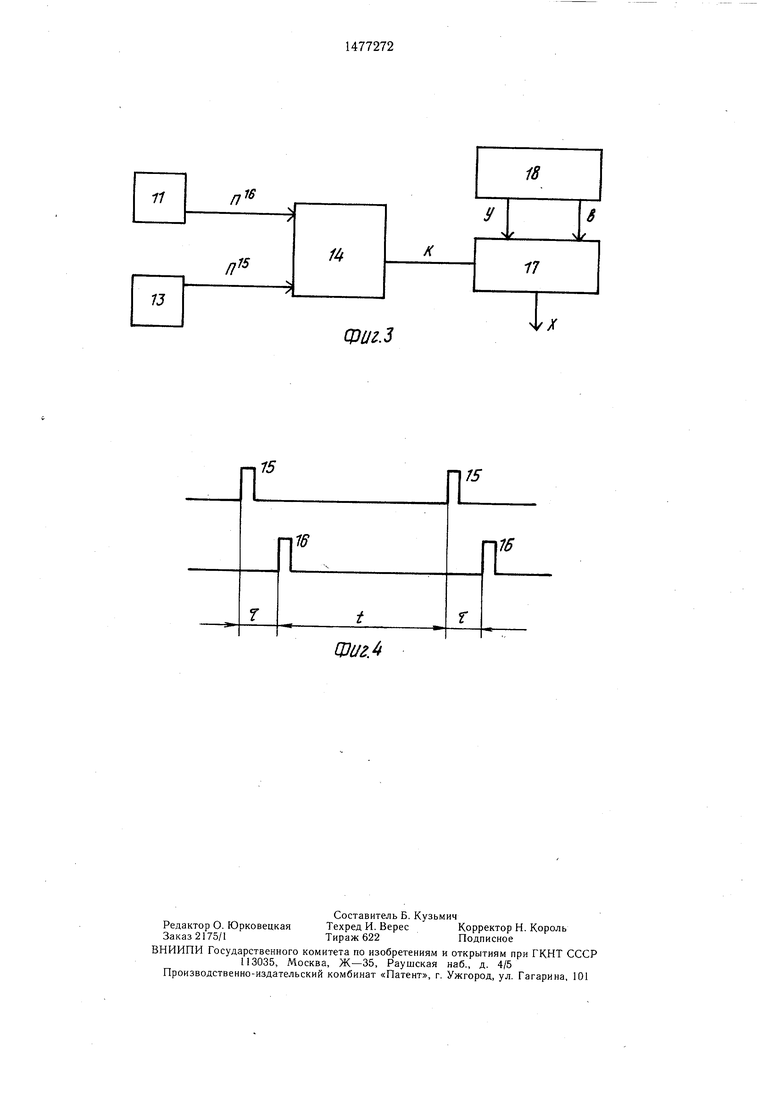
На фиг. 1 изображены агрегат с установленными на нем двумя фотоприемными устройствами (ФПУ) и размещенное на участке устройство, создающее две опорные световые плоскости; на фиг. 2 - то же, вид сверху и точка траектории движения агрегата, от которой отсчитывается продольная координата; на фиг. 3 - функциональная блок-схема устройства, измеряющего временные интервалы между моментами прихода одного из световых лучей на ФПУ и вычисляющего продольную координату агрегата; на фиг. 4 - временная диаграмма импульсов, вырабатываемых двумя ФПУ, установленными на агрегате.
Способ управления движением мобильного агрегата осуществляют следующим образом.
С помощью устройства 1, создающего опорные световые плоскости, расположенно4- го на участке, в пространстве над этим участком создают две опорные световые плоскости 2 и 3, пересекающиеся по прямой 4, параллельной направлению 5 движения агрегата 6. Опорные световые плоскости создают путем вращения световых лучей 7 и 8 вокруг перпендикулярных им осей 9 и 10 соответственно. При этом ось 9 перпендикулярна поверхности обрабатываемого участка, а ось 10 наклонена в плоскости, перпендикулярной прямой 4. С помощью фотоприемного устройства 11, расположенного на агрегате, регистрируют сигналы двух лучей 7 и 8, которые имеют отличающиеся световые параметры. .Это является признаком того, что ФПУ 11 находится на прямой 4 и агрегат 6 движется по ней. Если один из лучей выходит из средней зоны ФПУ 11, формируют сигнал, пропорциональный рассогласованию световых лучей, по которому и осуществляют корректировку движения агрегата. Таким образом, осуществляют поперечное корректирование движения агрегата. При этом известна лишь одна координата агрегата: у - расного устройства 13, расположенного на фиксированном расстоянии Ъ от фотоприемного устройства 11 вдоль продольной оси агрегата. Электрический сигнал с ФПУ 13 подают на устройство 14 измерения временных интервалов, куда поступают и сиг- нал ы, вырабатываемые фотоприемным устройством 11 при приходе на него светового луча 7. Устройство 14 вырабатывает цифровые данные о длительностях промежутков времени: т - между моментом прихода светового луча 7 на ФПУ 13 и приходом на ФПУ 11, а также t - между приходами луча 7 на ФПУ 11 и ФПУ 13. Допустим световой луч 7 вращают против ча- }5 совой стрелки. Агрегат движется вправо от точки 12. Сначала луч 7 пересекает ФПУ 13, которое вырабатывает сигнал 15 и направляет его на устройство 14 измерения интервалов времени. При попадании светового луча на ФПУ 11 оно вырабатывает сигнал 16, который поступает на другой вход устройства 14. В устройстве 14 проводят измерение временных интервалов между соседними импульсами 15 и 16, а также следующим импульсом 15. Данные о длительностях этих интервалов в цифровом (или аналоговом) виде поступают в вычислитель 17. В этом устройстве временные интервалы т и / сравнивают между собой и выявляют меньший - т. После этого вычисляют сумму т+/ и, частное /С(т-Н)/т. С пульта 18, размещенного в кабине, в вычислитель 17 вводят расстояние у между прямолинейной траекторией движения агрегата и точкой расположения устройства 1. При настройке устройства 1 для задания прямой 4 между осями 9 и 10 вращения световых лучей 7 и 8 устанавливается угол ф arctg(h/y), где h - вертикальное расстояние между световыми лучами 7 и 8 в устройстве 1. Это значение вводят каждый раз при выведении агрегата на формируемую прямую 4. Постоянно содержится в вычислителе значение b - расстояние между ФПУ 11 и 13, измеренное вдоль продольной оси агрегата.
30
40
45
В вычислителе 17 регулярно производят вычисление значения расстояния от агрегата (точнее от средней точки между ФПУ 11 и ФПУ 13) до точки 12 по формуле Х-л/ЬуК/2я-у2 При настройке устройства 1 для формирования прямой 4 на ней формируется точка 12, лежащая на прямой,
стояние от прямой 4 до места расположе- 50 пеРпенДикУляРнои семейству всех прямых
параллельных прямой 4, и проходящей через точку расположения устройства 1. На индикаторе вычислителя 17, размещенного в кабине, индицируется значение X, по которому водитель может принимать различные ре- 55 шения.
В вычислитель может быть встроено устройство, которое выдает импульсы для управления рабочими органами агрегата при
ния устройства 1, измеряемое по перпендикуляру, опускаемому из точки расположения этого устройства в точку 12 прямой 4.
Определение расстояния от точки 12 до агрегата осуществляют следующим образом.
Один из световых лучей, например луч
7, регистрируют с помощью фотоприем0
0
5
ного устройства 13, расположенного на фиксированном расстоянии Ъ от фотоприемного устройства 11 вдоль продольной оси агрегата. Электрический сигнал с ФПУ 13 подают на устройство 14 измерения временных интервалов, куда поступают и сиг- нал ы, вырабатываемые фотоприемным устройством 11 при приходе на него светового луча 7. Устройство 14 вырабатывает цифровые данные о длительностях промежутков времени: т - между моментом прихода светового луча 7 на ФПУ 13 и приходом на ФПУ 11, а также t - между приходами луча 7 на ФПУ 11 и ФПУ 13. Допустим световой луч 7 вращают против ча- совой стрелки. Агрегат движется вправо от точки 12. Сначала луч 7 пересекает ФПУ 13, которое вырабатывает сигнал 15 и направляет его на устройство 14 измерения интервалов времени. При попадании светового луча на ФПУ 11 оно вырабатывает сигнал 16, который поступает на другой вход устройства 14. В устройстве 14 проводят измерение временных интервалов между соседними импульсами 15 и 16, а также следующим импульсом 15. Данные о длительностях этих интервалов в цифровом (или аналоговом) виде поступают в вычислитель 17. В этом устройстве временные интервалы т и / сравнивают между собой и выявляют меньший - т. После этого вычисляют сумму т+/ и, частное /С(т-Н)/т. С пульта 18, размещенного в кабине, в вычислитель 17 вводят расстояние у между прямолинейной траекторией движения агрегата и точкой расположения устройства 1. При настройке устройства 1 для задания прямой 4 между осями 9 и 10 вращения световых лучей 7 и 8 устанавливается угол ф arctg(h/y), где h - вертикальное расстояние между световыми лучами 7 и 8 в устройстве 1. Это значение вводят каждый раз при выведении агрегата на формируемую прямую 4. Постоянно содержится в вычислителе значение b - расстояние между ФПУ 11 и 13, измеренное вдоль продольной оси агрегата.
0
0
В вычислителе 17 регулярно производят вычисление значения расстояния от агрегата (точнее от средней точки между ФПУ 11 и ФПУ 13) до точки 12 по формуле Х-л/ЬуК/2я-у2 При настройке устройства 1 для формирования прямой 4 на ней формируется точка 12, лежащая на прямой,
значениях X, кратных какой-либо величине, например 70 см или 5 м. При достижении агрегатом концевых точек гона устройство вырабатывает сигналы (звуковые или световые) для водителя. Эти сигналы могут подавать на устройство, обеспечивающее разворот агрегата.
В качестве устройства, создающего опорные световые плоскости, может использоваться комплект двух лазерных излучателей лазерных опорных систем САУЛ-1 или СК.П-1, которые содержат лазер, создающий вертикальный луч, а также вращающуюся вокруг вертикальной оси пентапризму, поворачивающую световой луч на 90°. Эти- системы широко применяются в мелиоративном строительстве для задания опорных световых плоскостей. Система САУЛ позволяет задавать наклон световой плоскости относительно горизонтальной.
В качестве фотоприемного устройства могут использоваться устройства, содержащие сегментные фотодиоды ФД-19КК или ФД-20КП. Эти диоды позволяют определять положение центра лазерного пучка с точностью 0,04 мм.
Измерение временных интервалов т u,t между соседними импульсами, формулируемых на ФПУ, может производиться с помощью прибора Ф4-16 (групповой измеритель времен запаздывания). С выхода этого прибора численные значения т и / в двоичном коде подаются на аналоговый вход микрокалькулятора МК-44. Для калькулятора составляется программа определения меньшего из них - т и вычисления коор0
5
0
динаты X. Предварительно в ячейки памяти МК-44 вводятся значения Ъ и у.
Формула изобретения
Способ управления движением мобильного агрегата по авт. св. № 1077590, отличающийся тем, что, с целью расширения функциональных возможностей путем дополнительного определения продольной координаты агрегата, регистрируют один из световых лучей в дополнительной точке, отнесенной вдоль продольной оси агрегата от точки регистрации рассогласования двух лучей, измеряют промежутки времени между моментами прихода этого светового луча в основную и дополнительную точки регистрации, определяют меньший из этих промежутков и по измеренным величинам определяют продольную координату агрегата X по формуле
5
0
+ 0/2лт-1Д
где b - расстояние между основной и дополнительной точками регистрации светового луча, измеренное вдоль продольной оси агрегата;
у - расстояние от траектории движения до устройства, создающего световые лучи;
x,t - меньший и больший промежутки времени между моментами прихода светового луча в основную и дополнительную точки регистрации соответственно.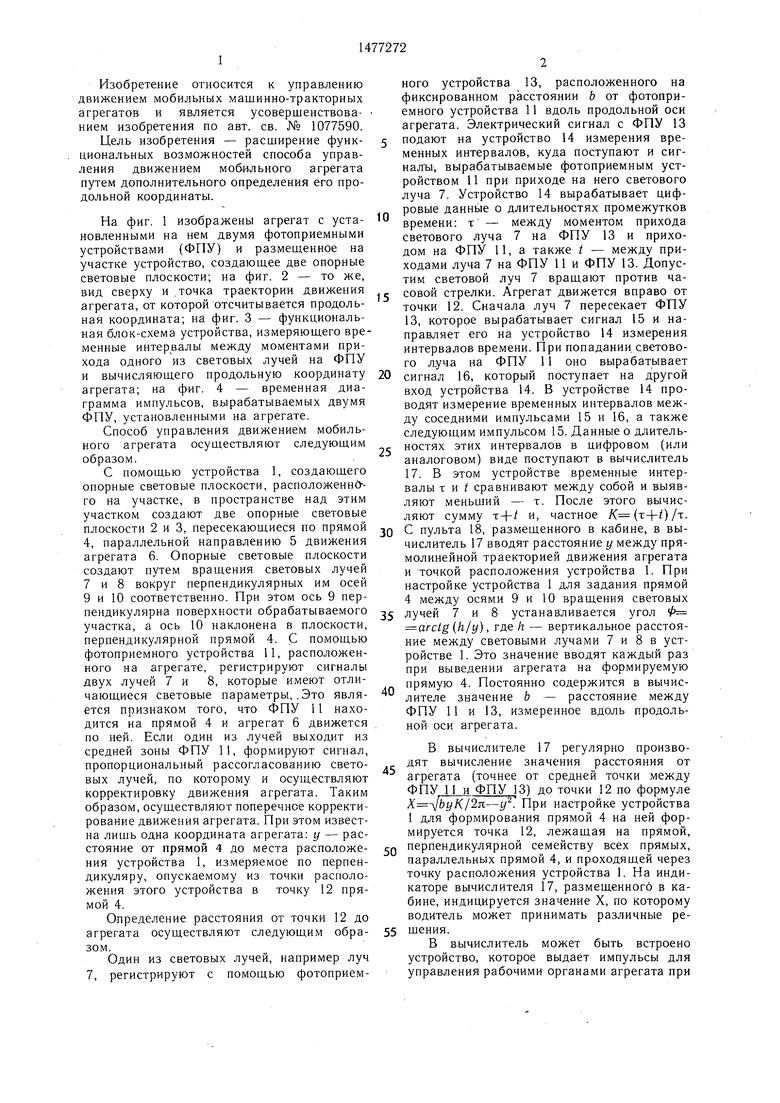
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2006 |
|
RU2335785C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| СТЕРЕОСКОПИЧЕСКИЙ КОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2016 |
|
RU2627550C1 |
| СПОСОБ СОЗДАНИЯ ВРЕМЕННЫХ ЗАДЕРЖЕК СВЕТОВОГО ПОТОКА | 1995 |
|
RU2109257C1 |
| Способ управления движением мобильного агрегата | 1983 |
|
SU1135439A2 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2011 |
|
RU2477866C1 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
Изобретение относится к управлению движением мобильных машинно- тракторных агрегатов. Цель изобретения- расширение функциональных возможностей способа управления движением мобильного агрегата за счет определения его продольной координаты. Для этого один из световых лучей 7 регистрируют с помощью фотоприемного устройства 13, расположенного на фиксированном расстоянии от фотоприемного устройства 11 вдоль продольной оси траектории 4 движения агрегата, измеряют промежутки времени между моментами прихода этого светового луча в основную и дополнительную точки регистрации, а продольную координату X определяют по формуле X= √ BY (τ +T)/ 2φτ- Y2, где Y- расстояние от траектории движения до устройства, создающего световые лучи , B- расстояние между основной и дополнительной точками регистрации луча, τ T- меньший и больший промежутки времени между моментами прихода луча в основную и дополнительную точки регистации. 4 ил.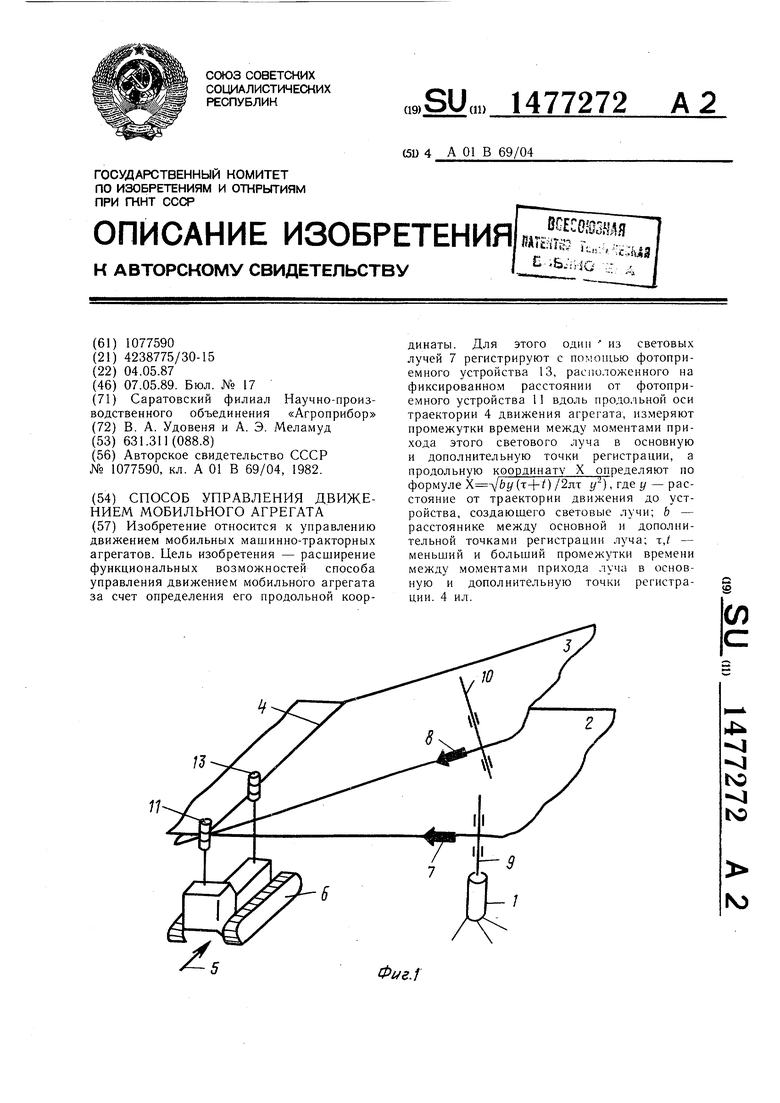
7КЖЕП
Р
Фив. 2.
/7
16
П
15
Фиг.З
ф1/г.4
18
6
Ч f
17
I
| Способ управления движением мобильного агрегата | 1981 |
|
SU1077590A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
