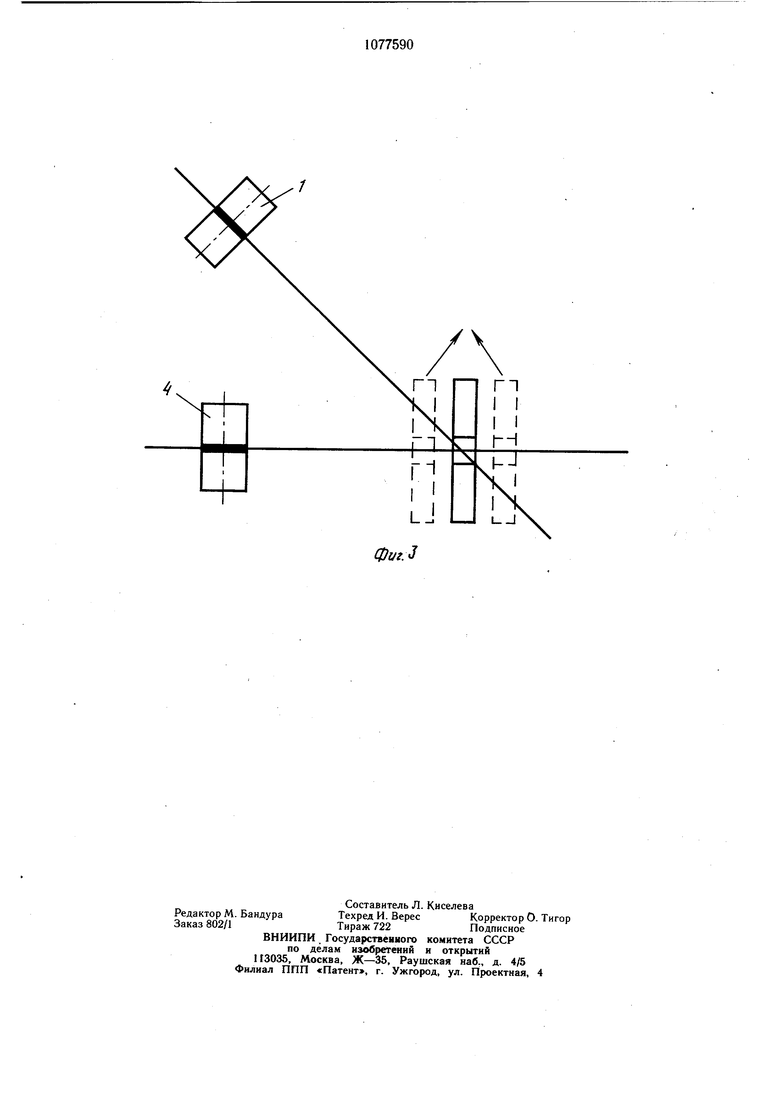
Изобретение относится к автоматическому вождению самоходных агрегатов и может быть использовано в сельском хозяйстве, например, для вождения тракторов. Известен споособ управления движением мобильного агрегата, включающий создание в пространстве опорной световой плоскости путем вращения вокруг оси, расположенной наклонно в плоскости, перпендикулярной направлению движения агрегата, светового луча, видимая линия пересечения которого с поверхностью земли параллельна продольной оси агрегата 1. Однако при использовании известного способа коорректировку направления движения агрегата осуществляет водитель по положению видимой линии пересечения бегущего луча света относительно следа, что приводит к утомляемости водителя и, в результате, к снижению точности вождения. Цель изобретения - повыщение точности вождения и облегчение управления агрегатом. Указанная цель достигается тем, что согласно способу создают дополнительную световую плоскость путем вращения дополнительного светового луча вокруг вертикальной оси и по сигналу рассогласования обоих лучей осуществляют корректировку направления, при этом дополнительному световому лучу сообщают параметры несущего сигнала, отличные от параметров основного светового луча. На фиг. 1 представлена схема устройства для реализации способа; на фиг. 2 - схема для определения угла поворота основной световой опорной плоскости; на фиг. 3 - схема корректировки направления движения фотоприемным устройством. Устройство содержит механизм 1 для вращения светового луча вокруг оси 2, которая расположена наклонно в плоскости, перпендикулярной направлению движения V агрегата 3. Второй механизм 4 предназначен для вращения дополнительного све-/
схГ тового луча вокруг вертикальной оси 5. На агрегате 3 установлено фотоприемное устройство 6 с блоком управления. Для осуществления способа посредством механизмов 1 и 4 осуществляют вращение световых лучей вокруг осей 2 и 5, которые создают в пространстве две опорные световые плоскости ы и , линия пересечения которых параллельна продольной оси агрегата 3. Принятые фотоприемныМ устройством 6 сигналы обрабатываются блоком управления, который корректирует направление движения агрегата в зависимости от того, как падают лучи на фотоприемное устройство 6. Если агрегат 3 движется по заданной траектории, то лучи от обеих плоскостей (X и yi падают на среднюю часть фотоприемного устройства 6 и блок управления не срабатывает. При отклонении агрегата 3 от заданной траектории влево или вправо (см. фиг. 3) лучи от плоскости jB падают соответственно на нижнюю или верхнюю часть фотоприемного устройства 6, при этом сигнал рассогласования поступает на блок управления, в результате срабатывания которого происходит корректировка направления движения агрегата 3. Для того, чтобы фотоприемное устройство .6 смогло различить сигналы от основной и дополнительной световой плоскости. они должны иметь различные параметры несущего сигнала. В частности, они могут различаться частотой вращения механизмов 1 и 4 при одинаковой частоте излучаемого све тового потока или наоборот, Для изменения траектории движения агрегата 3 необходимо произвести поворот опорной световой плоскости j3 (см. фиг. 2). Использование предложенного способа позволит повысить точность вождения, облегчить труд водителей и водить агрегат по различным параллельным траекториям.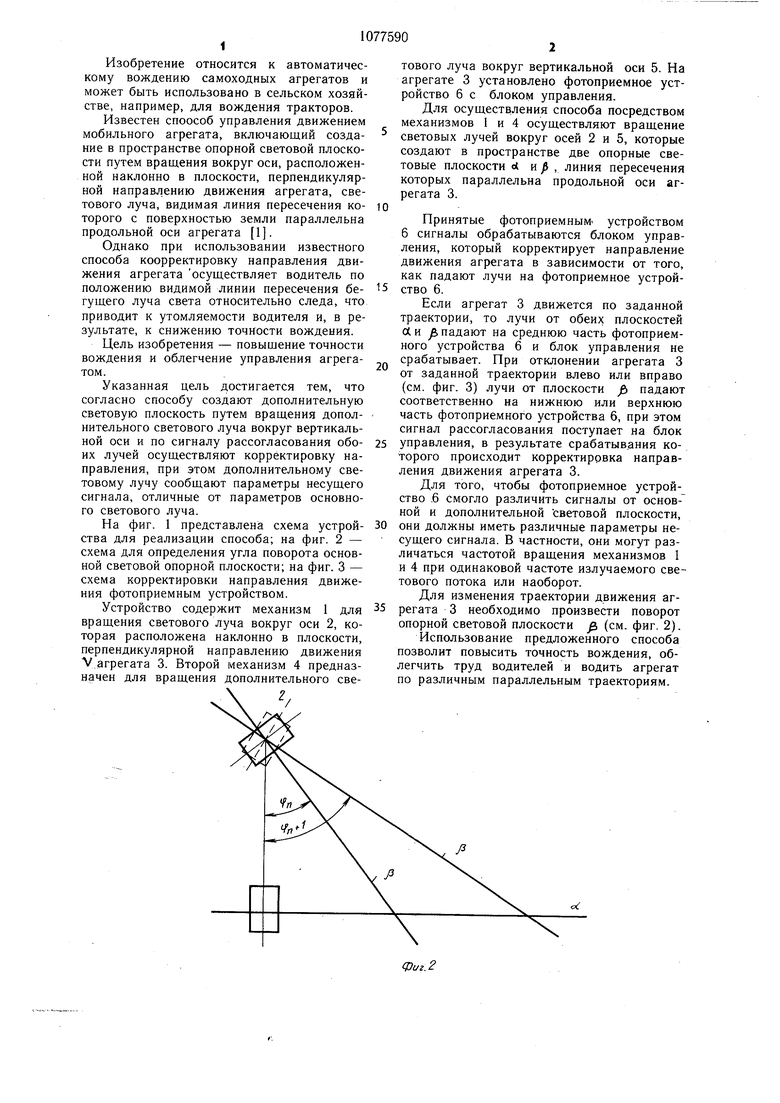
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением мобильного агрегата | 1983 |
|
SU1135439A2 |
| Способ управления движением мобильного агрегата | 1987 |
|
SU1477272A2 |
| Устройство для обучения водителей транспортных средств | 1984 |
|
SU1277172A1 |
| Устройство для параллельного вождения мобильных агрегатов | 1985 |
|
SU1380637A1 |
| Способ определения профиля показателя преломления оптических неоднородностей и устройство для его осуществления | 1990 |
|
SU1777053A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ИСПОЛНИТЕЛЬНОГО ОРГАНА МАШИНЫ С ЧПУ | 1988 |
|
RU2009764C1 |
| ОРИЕНТИР | 1995 |
|
RU2090993C1 |
| Следоуказатель к мобильным сельскохозяйственным агрегатам | 1973 |
|
SU468606A1 |
| Система автоматического вождения сельскохозяйственного агрегата по заданной траектории | 1991 |
|
SU1817958A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО АГРЕГАТА, включающий создание в пространстве опорной световой плоскости путем вращения вокруг оси, расположенной наклонно в плоскости, перпендикулярной направлению движения агрегата, светового луча, видимая линия пересечения которого с поверхностью земли параллельна продольной оси агрегата, отличающийся тем, что, с целью повышения точности вождения н облегченияуправления агрегатом, создают дополнительную световую плоскость путем вращения дополнительного светового луча вокруг вертикальной оси и по сигналу рассогласования обоих .лучей осуществляют корректировку направления движения, при этом дополнительному световому лучу сообщают параметры несущего сигнала, дтличные от параметров основного светового луча. (Л ел ;о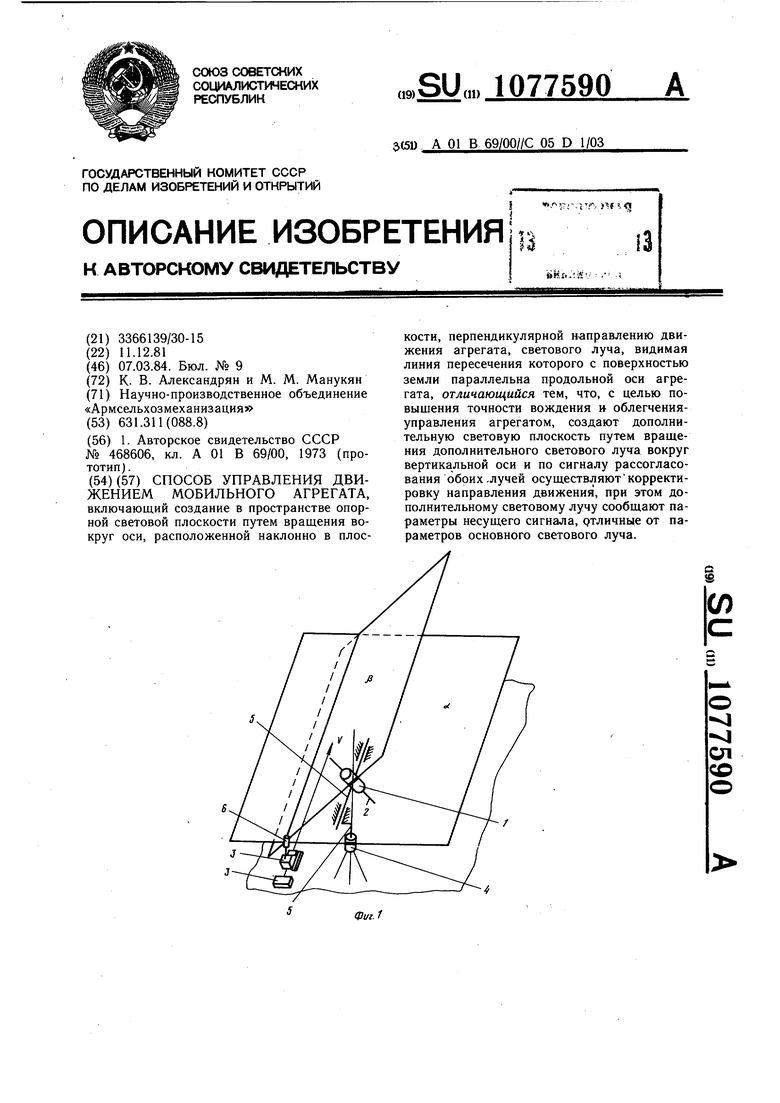
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следоуказатель к мобильным сельскохозяйственным агрегатам | 1973 |
|
SU468606A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
