i
Г в
Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов.
Известен промышленный робот, содержащий основание, выполненное в виде сварной металлоконструкции, наверху которой установлены две направляющие, одна прямоугольная, другая круглая, выполняющие функции портала, имеющие каждая по два подшипниковых узла, причем у каретки, сидящей на прямоугольной направляющей, в каждом узле установлено по два подшипника, а у каретки, сидящей на круглой направляющей, по три подшипника под углом в 120° один относительно другого.
Каретки, сидящие на предельных направляющих, связаны жестко между собой двумя направляющими, на которых установлена карета поперечного перемещения, причем в каЩом подшипниковом узле одной направляющей установлены четыре подщипника, а в другой направляющей в каждом подшипниковом узле установлены два подшипника, к каретке поперечного перемещения жестко крепится рука робота 1.
Недостатком известного промышленного робота являются низкие эксплуатационные характеристики.
Цель изобретения - улучшение эксплуатационных характеристик.
Указанная цель достигается тем, что в портале промышленного робота, содержащем четыре опоры, две продольные и одну поперечную направляющие, каретки, установленные на направляющих, и привод, одна каретка продольной направляющей снабжена двумя кронштейнами, соединенными осью, а другая - двумя кронштейнами с цапфами и крестовиной с центральным отверстием, которая установлена в цапфах, причем один конец поперечной направляющей выполнен цилиндрическим, а другой - прямоугольным, при этом поперечная направляющая. цилиндрическим концом установлена в центральном отверстии крестовины, а пря.лоугольным концом - на оси между кронштейнами, кроме того, продольная ось симметрии цилиндрического конца поперечной направляющей перпендикулярна продольным осям симметрии цапф и крестовины, причем оси симметрии расположены в одной плоскости.
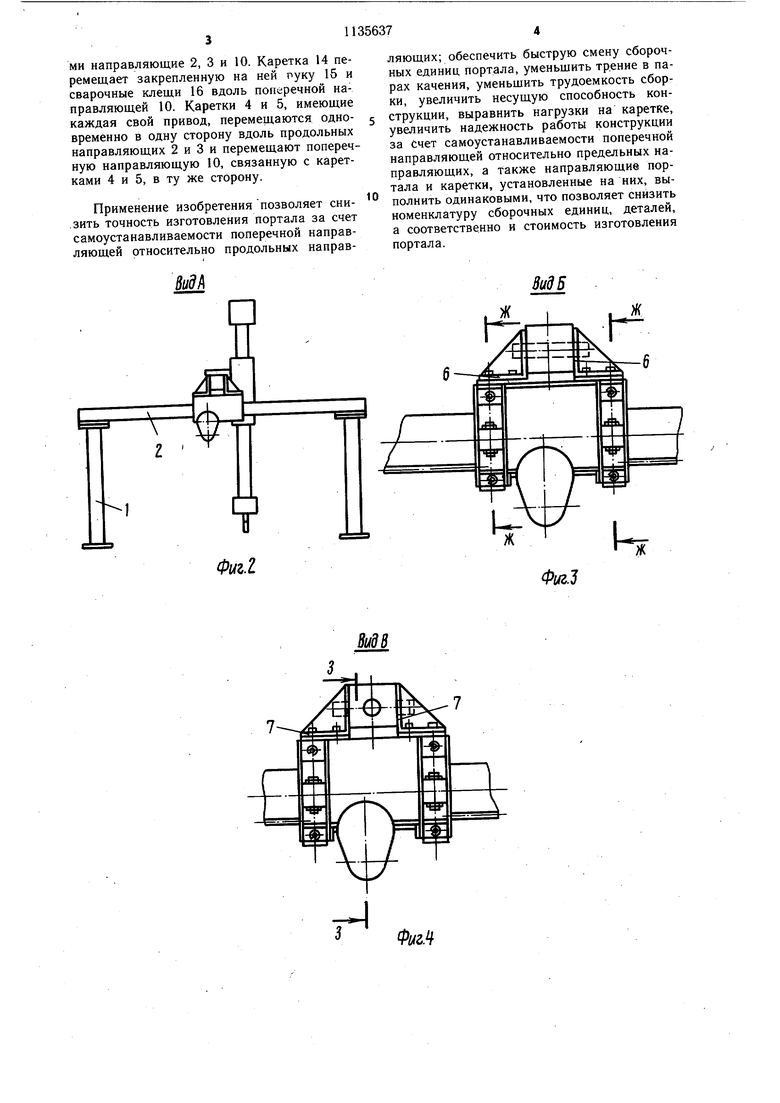
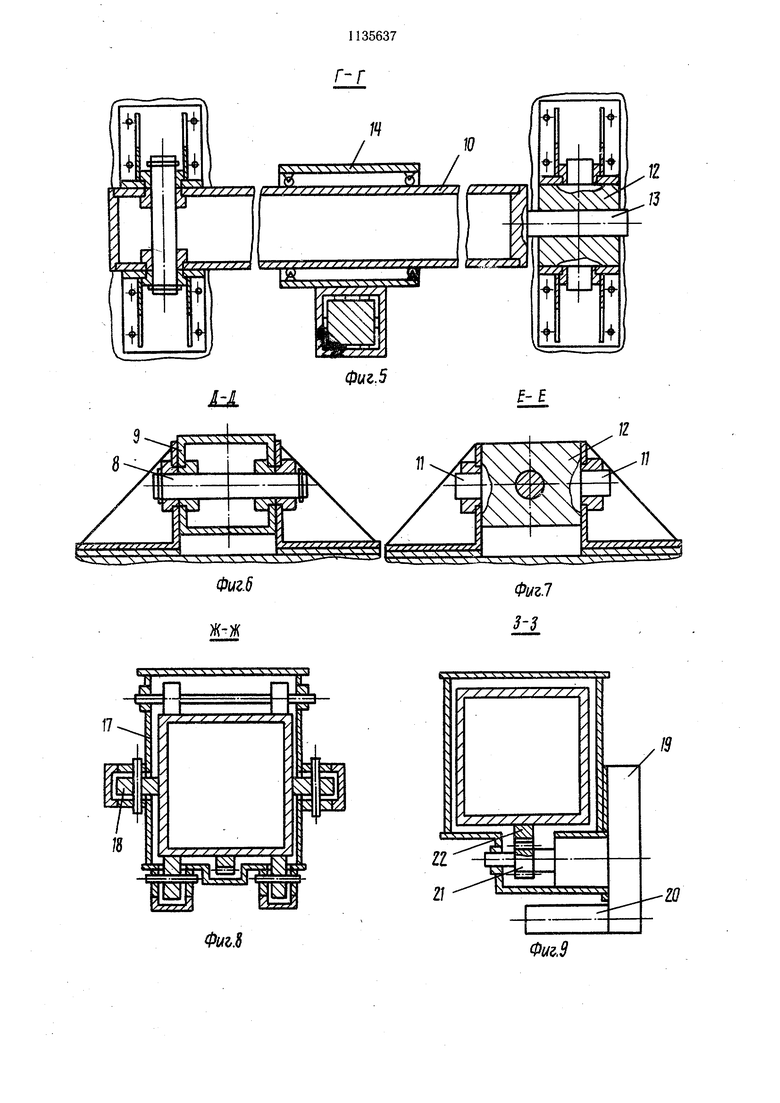
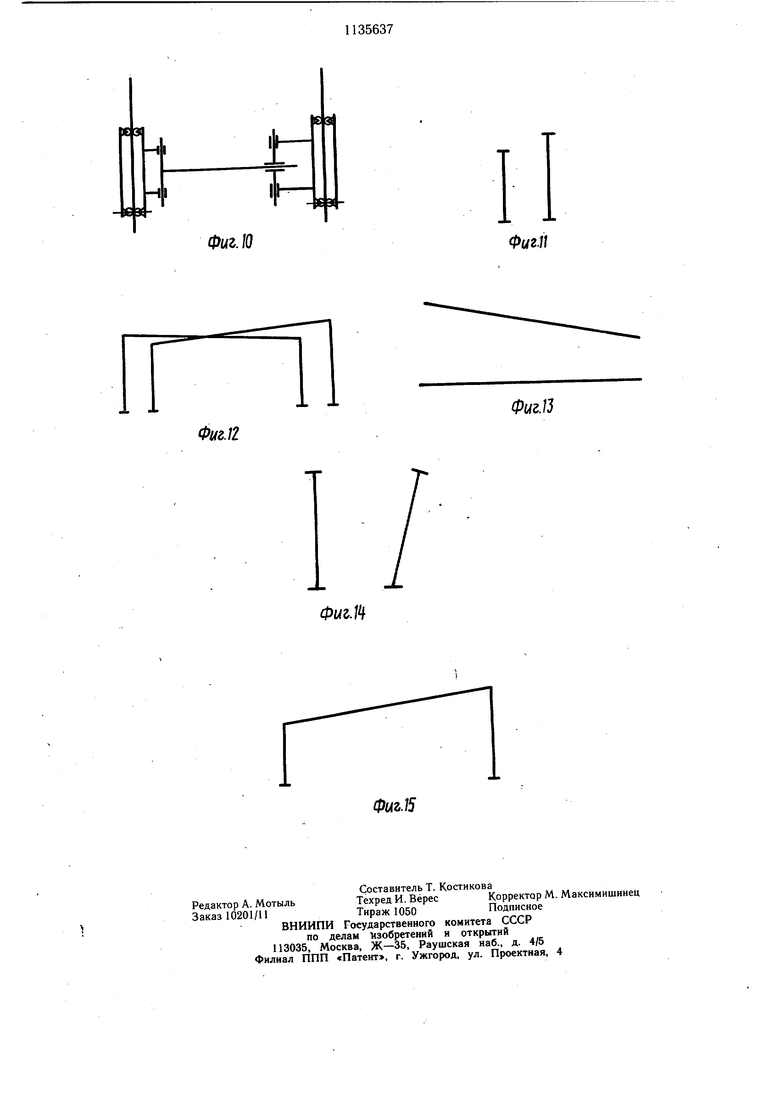
На фиг. 1 представлен четырехопорный портал промышленного робота с установленной на нем механической рукой; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1; на фиг. 6 - разрез Д-Д на фиг. 1; на фиг. 7 - разрез Е-Е на фиг. 1; на фиг. 8- разрез Ж-Ж на фиг. 3; на фиг. 9 -- разрез 3-3 на фиг. 4 на фиг. 10 - кинематическая схема связи поперечной балки с каретками продольных
направляющих; на фиг. 11 - вариант установки продольных направляющих на опорах различной высоты; на фиг. 12 - вариант установки направляющих в случае наклона направляющих в разные стороны в вертикальной плоскости; на фиг. 13 - вариант установки направляющих в случае их непараллельности в горизонтальной плоскости; на фиг. 14 - вариант установки направляющих в случае непараллельности опор в вертикальной плоскости; на фиг. 15 - вариант установки направляющих в случае, наклона направляющих в одну сторону в вертикальной плоскости.
Портал промыщленного робота содержит четыре опоры 1, продольные направляющие 2 и 3, установленные на опорах 1, на направляющей 2 установлена каретка 4, а на направляющей 3 - каретка 5. На каретке 4 закреплены два кронщтейна 6, а на каретке 5 - два кронштейна 7. В кронштейнах 6 при помощи оси 8 установлен прямоугольный конец 9 поперечной направляющей 10, а в кронштейнах 7 цапфами И установлена крестовина 12 с центральным отверстием в котором установлен цилиндрический конец 13 поперечной направляющей 10. На последней установлена каретка 14 с закрепленной на ней рукой 15 робота, имеющей сварочные клещи 16. Каретки 4 и 5, установленные на направляющих 2 и 3, а также каретка 14, установленная на поперечной направляющей 10, выполнены в виде короба 17, на каждом конце которого установлено по шесть роликов 18, находящихся в контакте с направляющей, а сбоку кареток установлены редукторы 19 прямолинейного перемещения с двигателями 20, выходные шестерни 21 которых находятся в зацеплении с рейками 22, закрепленными на направляющих 2, 3 и 10.
При сборке и установке портала невозможно добиться строгой параллельности продольных направляющих 2 и 3 в вертикальной и горизонтальной плоскостях, а также очень трудно установить направляющие 2 и 3 на одном уровне от горизонта, т.е. возможны варианты установки продольных направляющих по одной из схем, изображенной на фиг. 11-15, поэтому поперечная направляющая 10 самоустанавливается относительно кареток 4 и 5, а значит и относительно продольных направляющих 2 и 3.
Устройство работает следующим образом.
Каретки 4, 5 и 14 могут соверщать относительно своих направляющих 2, 3 и 10 возвратно-поступательные движения, при этом вращение от двигателей 20 через редукторы 19 прямолинейного перемещения передается их выходным щестерням 21, а последние, вращаясь, перемещают каретки 4, 5 и 14, а вместе с ними перемещаются и сами направляющие 2, 3 и 10. Каретка 14 перемещает закрепленную на ней пуку 15 и сварочные клещи 16 вдоль поперечной направляющей 10. Каретки 4 и 5, имеющие каждая свой привод, перемещаются одновременно в одну сторону вдоль продольных направляющих 2 и 3 и перемещают поперечную направляющую 10, связанную с каретками 4 и 5, в ту же сторону. Применение изобретения позволяет сни.зить точность изготовления портала за счет самоустанавливаемости поперечной направляющей относительно продольных направФигляющих; обеспечить быструю смену сборочных единиц портала, уменьщить тр.ение в парах качения, уменьщить трудоемкость сборки, увеличить несущую способность конструкции, выравнить нагрузки на каретке, увеличить надежность работы конструкции за счет самоустанавливаемости поперечной направляющей относительно предельных направляющих, а также направляющие портала и каретки, установленные на них, выполнить одинаковыми, что позволяет снизить номенклатуру сборочных единиц, деталей, а соответственно и стоимость изготовления портала. Вид 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ОБРАБАТЫВАЮЩЕГО ИНСТРУМЕНТА (ВАРИАНТЫ) | 2007 |
|
RU2368473C2 |
| Заглаживающая машина | 1973 |
|
SU499118A1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| Робототехнический сборочно-сварочный комплекс | 1987 |
|
SU1537475A1 |
| СОРТИРОВОЧНАЯ КАРЕТКА ПОПЕРЕЧНОГО ТРАНСПОРТЕРА | 1972 |
|
SU335172A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ ПРЕИМУЩЕСТВЕННО ДЛЯ ОРУЖИЯ ТИПА ТОРПЕДЫ НА ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2007 |
|
RU2337854C1 |
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 2000 |
|
RU2190035C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРОСОВЫМ ПРИВОДОМ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2015 |
|
RU2636243C2 |
| БУРОВАЯ УСТАНОВКА | 1993 |
|
RU2057928C1 |
ПОРТАЛ ПРОМЫШЛЕННОГО РОБОТА, содержащий четыре опоры, две продольные и одну поперечную направляющие, каретки, установленные на направляющих, и привод, отличающийся тем, что, с целью улучшения эксплуатационных характеристик, одна каретка Продольной направляющей снабжена Двумя кронщтейнами, соединенными осью, а другая - двумя кронштейнами с цапфами и крестовиной с центральным отверстием, которая установлена в цапфах, причем один конец поперечной направляющей выполнен цилиндрическим, а другой - прямоугольным, при этом поперечная направляющая цилиндрическим концом установлена в центральном отверстии крестовины, а прямоугольным концом - на оси между кронщтейнами, кроме того, продольная ось симметрии цилиндрического конца поперечной направляющей перпендикулярна продольным осям симметрии цапф и крестовины, причем оси симметрии расположены в одной плоскости.
Фиг.6 ж-ж
Фиг: 5
Фиг.7 3-3
Фиь.
Фи&.3
Фиг. Ю
Фиг.12
Фиг.П
Фиг./5
Фиг.15
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Юревич Е | |||
| И | |||
| и др | |||
| Устройство промышленных роботов | |||
| Л., «Машиностроение 1980, с | |||
| УСТРОЙСТВО ПАРОПЕРЕГРЕВАТЕЛЯ | 1920 |
|
SU295A1 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
