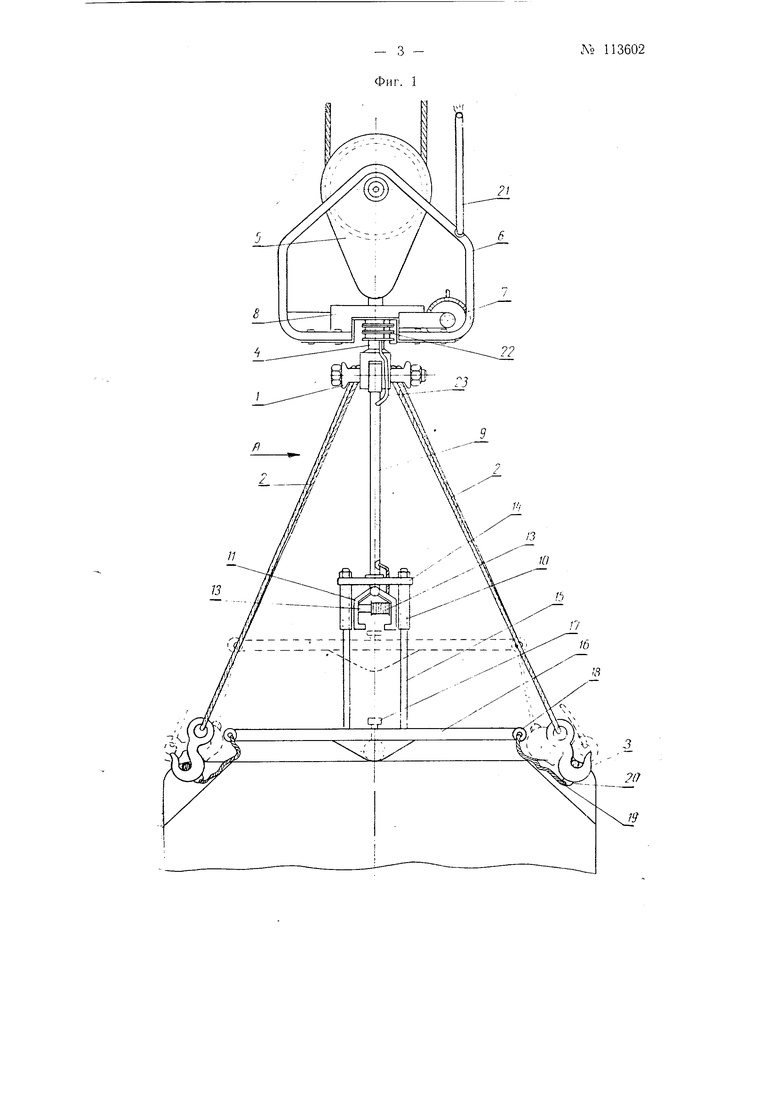
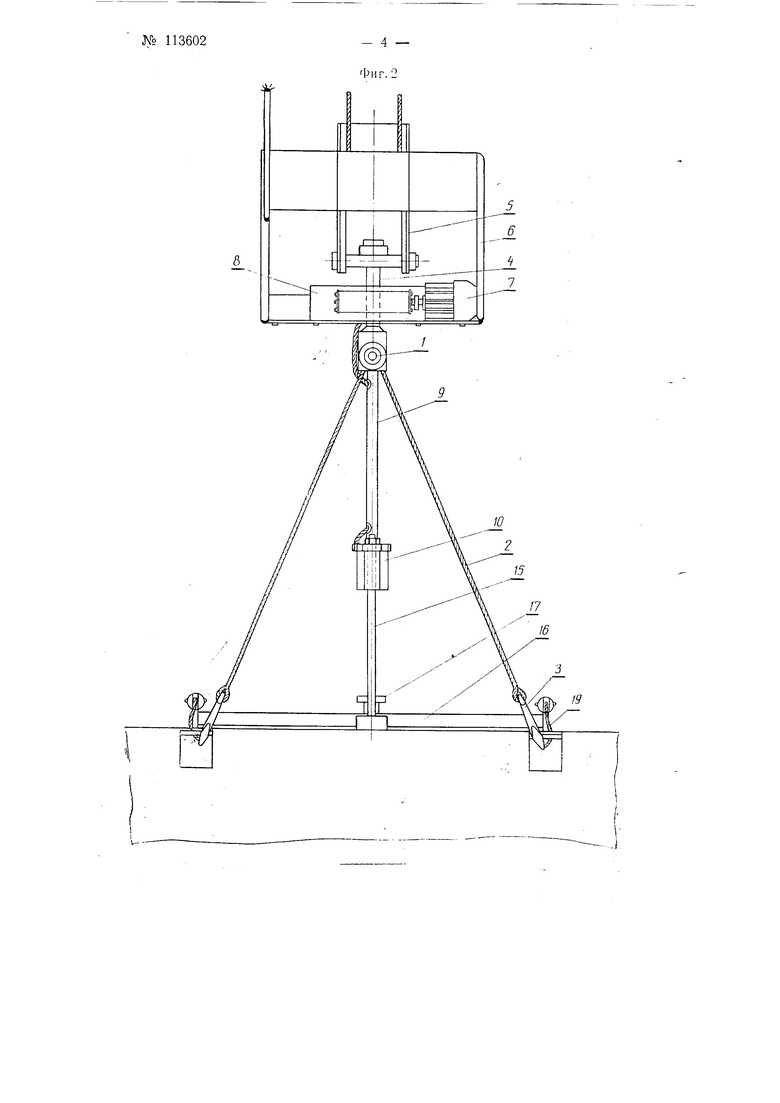
Захватные прислосооления для контс| |не;)ов. :наожеиные электроЛ агнитным приспосоолением для автоматического вывода захватных крюков из кольцевых приборов контейнера, известны. В этих приспособлениях захватные крюки монтируются на жесткой раме, в си.ту чего приспособ.чение получается сравнительно громоздким и тяжелым. Предлагаемое приспособление предназначено для -автоматизации стцеики контейнеров. Для подъема контейнеров используются гибкие стропы без жесткой рамы. CynuiocTi изобретения заключается в том, что приспособление для автоматического вывода грузовых крюков из кольцевых приборов контейнера выполнено в виде соединений с обоймой для верхних концов ст 5опов с помон1ью тяги каретки, HecynieA электромагнитный ловитель и направляелю вертикальными стоГ1ками, монтированными на плите с грибком в ее це;;тральпой части и ушками по углам для присоединенных к захватным крюкам тросов. Ловитель образо;ан двумя разводимыми цружпно1 i г -бками. иа одной из которых монтирован соленоид, а на другоС; -сердечник. На фиг. 1 изображен обши BH.I захватного ириспособления, гид на фиг. 2-вид ириспособления по CTiie.TKe .4 па фиг. 1. Обойма / для верхних концов стропов 2 с захватными крюками 3 на нижних концах при иомоии хвостовика 4 монтирована на обо;1ме 5 подъемника. На Heii установлен также поворотньп механизм о с 1еверсивным электродвигателем 7 и редуктором S. С o6oiiMi-i; i л,.тя стропов с помоп1ью жестко:, трубчатой тяги 9 соедипена каретка Ю, несунщя электромагнитный .ювг,тель //. Последни образован двумя разводимыми пружиной губками, на одной из которых монтирован соленоид, а па другой сердечник 13. Каретка образована соединенными поперечно двумя трубчатыми элементами 14, паправ,тяемыми вертикальными CToin aMn /,;. Стойка установлена на плите 16 с грибком 17 в ее цент ально части и ушками 18 по углам. Ушки предназначены для закрепления одних
концов ipoJOB 19, 11|)исосдиняе.мых друпими концами к уткам 0 на рогах подьемных крюков.
Подвод электроэнергии к захватному нриеноеоблеиию осун1еетвляется многожи.тЕзНым проводом 2, проложенным в трубчатом каркасе поворотного механизма 6. Подача тока в электромагнитный захват производится через нютки, кольцевой KOHTaiXT 22 и провод 2 в тяге 5. Унрявленне механизмами захватно го приспособления осун1еетвляется из кабины крана носредством кнопок ц магнитных пускателей, смонтированных на нульте унрав.тения.
Действие н)едлагаемого захватного приснособ.тення осушеств. с.чедующим об|1азом.
KoHTeiniep перегружается с места па место и при ослаблении стронои не может быть отценлеи. При необходимости п)юизвести отнеику захватных к|)юков мантнист крана ставит KOHTcfiHep на место и опускает захватное нриснособ.ление до унора каретки в плиту 16. Затем включается соленоид 12 и .ювнтель за-Х;ватывает головку грибка 17. При подъеме захватного приснособления в таком ноложении цро:исходит подъем каретки с плитой и с поЛ1онд,ыо тросов захватные крюки выводятея -из приборов контейнера. После вывода крюков из кольцевых приборов крановщик выключает электромагнит ловите.1я, плита 16 со етоякалп- оиускается вниз и удержи.вается на поперечине каретки. Тро:ы 19 ослабевают и опускаются вместе е крюками вниз,
захватное присио:оо,1ение принимает исходное по.1ожение и готово к очередиому заценлению.
Паличие в захватно.м нриспособ.теиии гибких стропов дает возмож)iOvTb применять его д.чя транспортирования контей;неров различных типов и позволяет ст)оповщику свободно маневр.и.ровать с грузозахватными крюками.
П р е ;i м с т и з о б р е т е н и я
1.Захватное нр;испо:обление для коНтейнеров, снабженное электроMaipriTHbiM п 1иснособ,тением для автомагического вывода захватных крюков из кольцевых приборов KCHTcih-iepa,о т л н ч а ю щ е е с я TiM, что, е целью автоматизации отцепки контейнера при использован И;;1 д.тя ег-о подъема гибких строион, нрислюсоблен.ие для авто.матического вывода г 5узовых крюков из ксхпщевых приборов контейне 5а вьню.тноно в виде соединенной с для верхних концов стропов с помощью тяги и несущей э.мектромагнитный .ть каретки, направляе.мо вертикальными стойками, монтированными на плите с захватываемым ловителем, рибком в ее центральной части и ушками по углам для присоединенН)1Х к захватным крюкам тросов.
2.Фор.ма выполнения приспособ.чения по п. 1, от л и ч а ю И1 а я с я тем, что ловитель образован двумя 5азводимыми пружиной губками, на одной из которых монтирован со;1еноид, а на другой-сердечник.