Автпдгагичес1;:н отцецляюиигеся от грула захваты, у которых крюки соединены с грузовыми цепями, лакрглленными па серьге для навешивания на к1)тк подъемника, уже известны. Одкак эти захваты облагают тем недостатком, что их конст1)укцяя не обеспечивает надежности HR-YOматичеокого отцена от груза.
В от1лич;ие от иэвестных лахвато с автоматичес сйм отцеполг, в н))едлагаемом захвате этого типа применены двухзвенные стержни, кажды): и. которых одним концом Л1а.рнирно за-креллен ,на -рузово1 цеик, а други.ч-также 1Г а1ширно связан с головко захватного крюка. Звено стержня, прямыК а1ощее к r)y3o:iioi ;епп, онабжепо собачкой, запепл поп(ен за зацен на наруаоной стороне )ога захватного крюка при ослаблепии г)узовых цепей захвата до такого поло;кепмя, нри котором звено коснется рога крюка. Taiioe сочета1гие и расположение частей захиата обес1гечивает на дежНО|Сть его автом атНче ко)о итце1га от кштеннера.
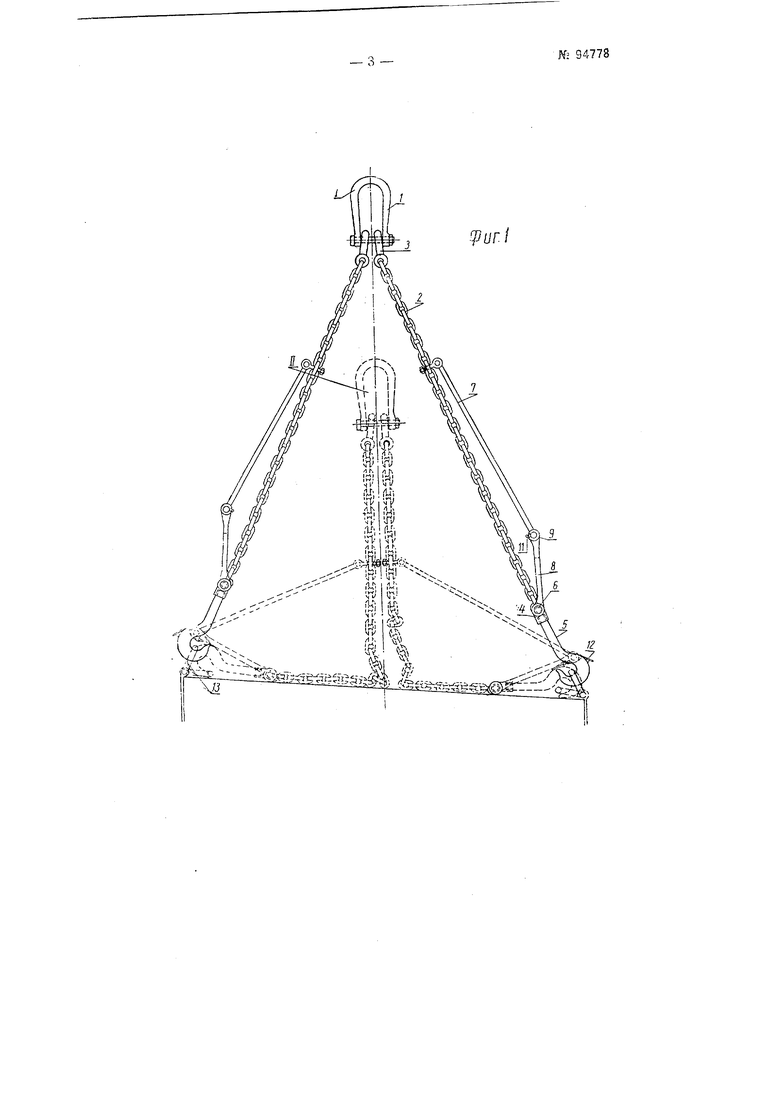
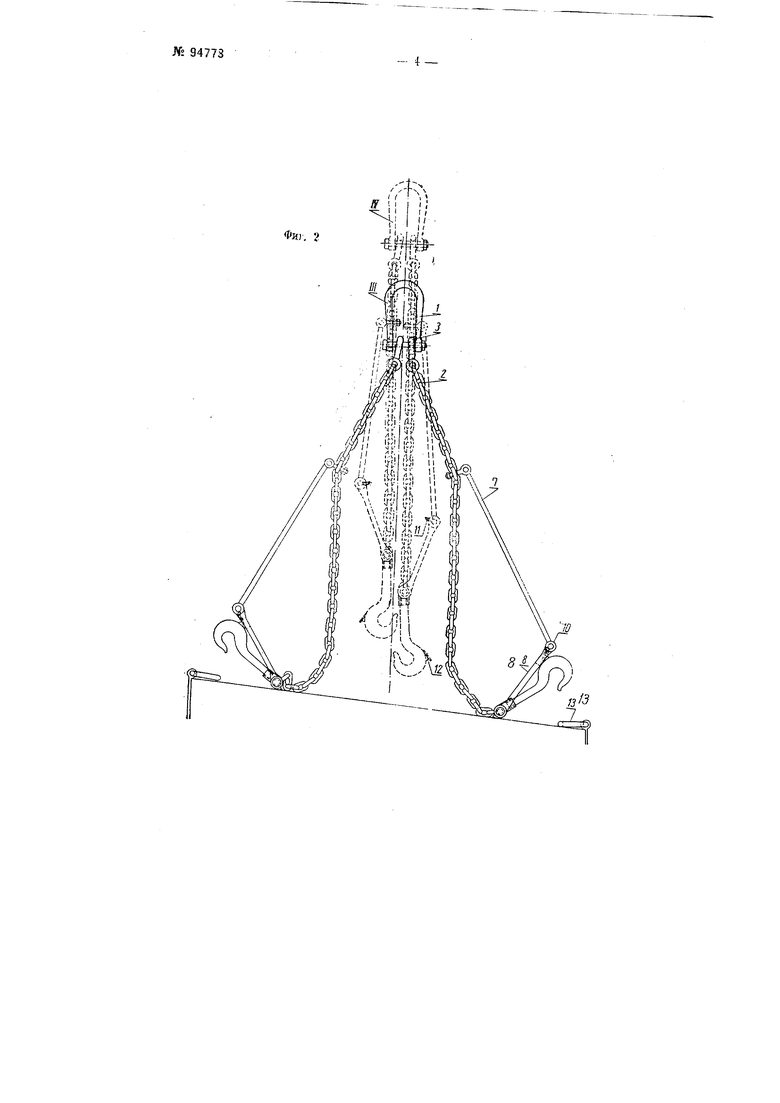
На фиг. 1 и 2 чертежа изображены четыре положения .захвата с аКтоматнческп отцепом; на фиг. 3-узел захвата.
Обвединяющей се1)ьгой (1) (фИ1. 1 н 2} захват начелгиваетс.я на грузовой KIJIOK нодъемннка, наприме) нод-ье много крана. feTi.ipe ji)y30i;i,e цепн (2) попарно ск)еплен11)Г серьгами (3) и надеты на валик, н|1сну денный че);е. оловку объединяющсй се)ьги (1). Второй конец каждо1 г це)1И (2) присоединен к голоике (4), в К{) заделан захватный крюк. ().
Одннм концом двухзве}1ный стержень, лрп noiMoHUi нгарнира {G) связан с. головKoii (4): другим концом OTI также 1нарнир1(0 за1;рен.1ен на )рузовой цепи (2). Двухзкенньп с,тер;кепь состоит из верхнего звена (7) и нижнего (8), лшрнирно соединенных между собой головками.
Для TiiTii чтобы обеснечкть тговорот i;i)ioKoi (5) в нужную т oi-ji захвата стиропу, у головок (4) н|)едусмотрены приливы (9).
1оловка (10) звена (7) снабжена собачкой (И) (фн). 3), зацен,1яюн|,е11 за зацеп (12) iia нару:/кн1н 1 iiora захватпо1го K)iioKii, (Г)), когда :пл головка .ложится наPOJ
Захват действует с.шдуклцп.м образом. .1а11пгнист к дъемного 1;рана опускает
r|;y: 0iif.4i iipioK с ллхват ;,--и }|;11Ц);|Ц.иняи к K.oineiinepy. ,Ж(1щему иодьсму, iieромещению и устяноике, иапримср на же.1езкод()|лЖнои и.()1)лге. аахва1-а нанимают коложение (IVj (фиг. 2). .Когда : ахват окажется над |;пцтеин)П.ч, )ао:)чии-:тр1И1а,( 15)|учную аанидит :iaхнат |,1е крюки (Г)) н серыи (13) кантецле)а. JliHMc .чтоГо захват с контеГсиером | одни аетс}1 и происходит неремсщггшс j;o;rrciinepa к месту uorijyaKii. Части :iaхната ;.анимают положение (I) (фиг. 1). Ли опускании контейнера на платформу и устанп1 1;е его в требуелгом положении лашюПГст О11ус1;ает ()ii KJIIDK с ла.xisaTOM в 11ан|1а1 леиин к контейнеру так. jipy; OBbie псин (2) ослаоилнсь. 1)И ;-)том части :iaxjiaTa приитгмают ииложение (J) (||1И/-. 1). Звенья (7) и (8) каждого двух: иенн111о CTeiijKHii яоворачипаются около 1иарниров. :)ахватиые Kiimia-i (5) (шускаи)тся на ьоитеннер. |:б1)а1ценный си(имн йенами к оси захвата, а звенья (8) с(111)ика.са1отся с рогами крюков. При таком ноложеиии частей ;) собачк(11) иод действием веса стержней (7) и (8) : аходят и Н:ру;1,ИноП защелкнваются за заиеиъ (12) к))1ог;()в.
При JИ)Д|,eмe I iiynuKoiD к.оюка с з.ахватом Bisepx части . переходят из Ноложеиня (.) (. 1) и 1И)ложсние (111) (фиг. 2). оахватные К|)юки (5) Л1,гходят из cepei (11) 1;онтеГп|ера, чем осун1,еетвляется автоматически отцен захвата -п контейнера.
1Г))И дальнеПигем иоачдме lacTH захвата иод действием сил тижестн и1)ИН 1мают Н)лож,енне (IV) (фн1. 2), так как (7) и (8), поворачиваясь, ра1ходятся и собачки (11) (ггцен;гя отся от зацеиов (12). освобождая крюки (Г)), KoTojibie слободно IJJoвиlaют на цепях (2).
Для того, гг(101)Г обе.епечмть MepiM техники безоласнисти и иредун))еди1Л, возможные аварии. ден1:тв 1е автоматическое) отцеиа в даииой к-(жсгрукн,ии захвата основано ке только на ослаблении грузовмх ценей нри иостаконке контейнера на место, но ен(о и на до)Н1лнительиом об,язачельном ио,ииж,енни 1;)юка нодъемиои.-а практически на 0,7 (м).
,1Гран.ИЛЬН() отрегулиро1 а иные двухзвенные стержни обеспечивают надежность С1)абат11,в;и1ия а вто.матичес i:.im отцепа: одновременное запада.ние четьгрех собачек за зацепы KJJJOKOB и ывод из заци1.1еиии крюков jf захватп/,(х ко.чец коитеП нера.
Вследс.тиие того, что контейнеры имеют наклоншые к.( и ио:-)то.му разиый уровень 1)а иоложени,я захват1 ых серег для Н11авильно1о зацепления н плавного нод1)еча К1нггейнер1)м. захватные це)гн в нред.laiaeMoM имеют разную д.шну jr соот1 етству1()1цую отличнтел ную ок)аску: две ко()откие ценН- белую, две длинные - i;j).
II р е д ме т и з о б р е те н н я
Захват с а1,томатическнм oiT(4ioM для :онтейне)а, захватные KJJIOKK которого соединены с обьедпня1он1ей серьгой для и;и «н1иван:ия на KPJOK иодьемпика, о Т л и ч а )о .щ и И с я тем, что. с пе. надежности if своеиременности ()абатываиия отцеиа, в нем применены двухзвенные , 1;а;кдый из KOTojibix одним концом nrapiiHiino зак))ен.ден fa грузовой цен1М, а также HiapiiHjJHo связан с 1(1.Т1Нл;ой захватиош к-рлжа. с.набженпого на на||ужной стороне рога заценом, с KDjopbi r взаимодействует при ослаблении рузовьгх 1еней до ио.юженш И1)ик:1си( .тер;1;ня к )iUy 1,.рюка собачка, устаиов.гепнал на дву, сте)жне.
yurl
Фи), г
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват с автоматическим отцепом для контейнеров | 1951 |
|
SU94955A1 |
| Захватное приспособление для контейнеров | 1957 |
|
SU113602A1 |
| Захват для контейнеров | 1951 |
|
SU93165A1 |
| Захватное приспособление для контейнеров | 1956 |
|
SU107548A1 |
| Устройство для выкалывания льда из ледяных бунтов | 1954 |
|
SU100659A1 |
| Приспособление для поворота вокруг вертикальной оси грузозахватных механизмов подъемных кранов, преимущественно захватных механизмов для контейнеров | 1958 |
|
SU118966A1 |
| Устройство для захвата грузов | 1986 |
|
SU1379225A1 |
| Захват для контейнеров | 1980 |
|
SU956410A1 |
| Клещевой захват | 1985 |
|
SU1379227A1 |
| Грузовая подвеска подвесного конвейера | 1975 |
|
SU581025A1 |