Р1звест11ы устройства для автоматической застроповки и отстроповки контейнеров, включающие раму с захватными крюками и направляющими козырьками. На раме смонтированы стойки, вдоль которых перемещается траверса с шарнирно-рычажньши механизмами управления захватными крюками и стопорным механизмом. Стопорный механизм выполнен в виде управляемых электромагнитами кулачков, взаимодействующих с пазами рамы.
Описываемое устройство относится к такому же типу устройств. Особенностью его является то, что на противоположных сторонах рамы смонтированы подвижные упоры, которые взаимодействуют с шарнирно-рычажными механизмами управления захватными крюками. При такой конструкции устройства ограничиваются усилия, действующие на крышу контейнера при его подъеме.
Упоры выполнены в виде регулируемых подпружиненных штанг, которые расположены в направляющих стоек, закрепленных на раме в местах установки упоров.
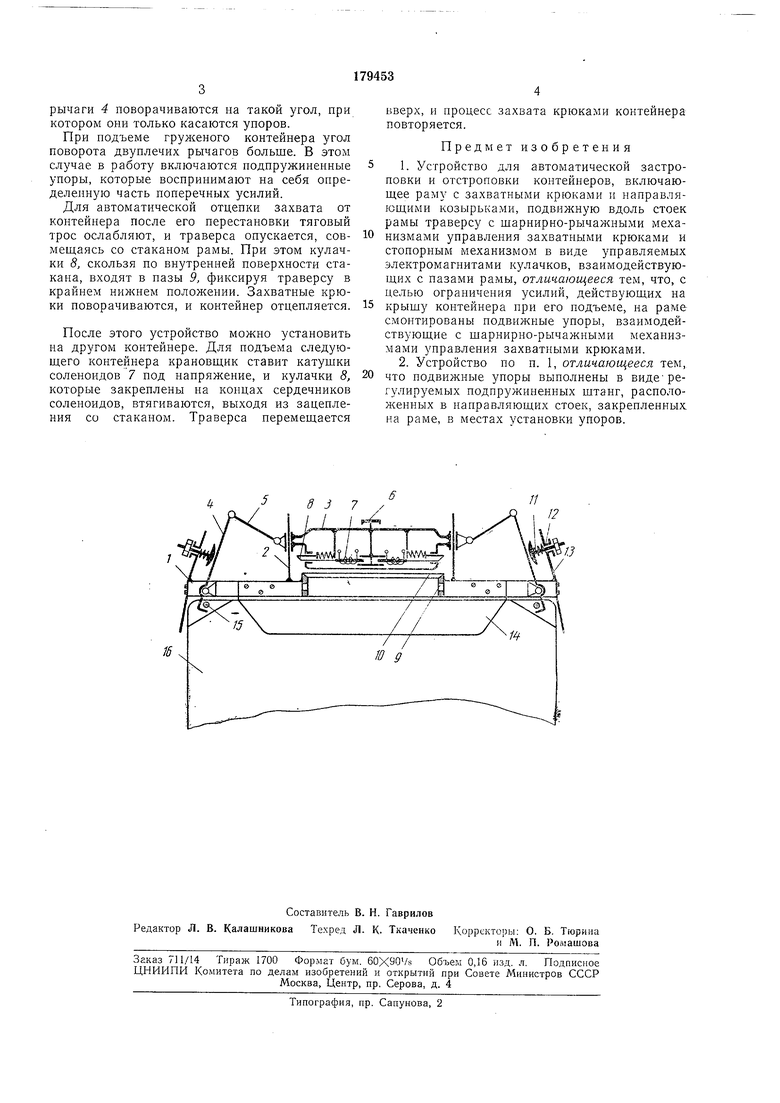
На чертеже схематически изображено описываемое устройство.
вающиеся захватными крюками, а с другой- шарнирно связанные со звеньями 5, которые, в свою очередь, подвижно соединены с траверсой. Двуплечие рычаги вместе со звеньями образуют шарнирно-рычажные механизмы управления захватными крюками. В средней части траверсы смонтировано ушко 6 для крепления устройства к погрузчику. На траверсе расположен стопорный электромеханический механизм, обеспечивающий сцепление ее с рамой устройства. Стопорный механизм включает в себя управляемые посредством соленоидов 7 подпружиненные кулачки 8, которые взаимодействуют с пазами 9
стакана 10, установленного в средней части рамы.
На противоположных сторонах рамы закреплены подвижные упоры, вьшолненные в виде подпружиненной регулируемой штанги 11,
расположенной в направляющих 12 стойки 13. На раме предусмотрены направляющие козырьки 14.
Устройство работает следующим образом. При натяжении тягового каната траверса
перемещается вверх относительно стоек 2. Приходят в движение рычаг 4 и звено 5 механизма управления захватными крюками, и последние зацепляют за рымы 15 контейнера 16.
рычаги 4 поворачиваются на такой угол, при котором они только касаются упоров.
Прн подъеме грулсеного контейнера угол поворота двуплечих рычагов больше. В этом случае в работу включаются подпружиненные упоры, которые воспринимают на себя определенную часть поперечных усилий.
Для автоматической отцепки захвата от контейнера после его перестановки тяговый трос ослабляют, и траверса опускается, совмеш,аясь со стаканом рамы. При этом кулачки 8, скользя но внутренней поверхности стакана, входят в пазы 9, фиксируя траверсу в крайнем нижнем полоЛСении. Захватные крюки поворачиваются, и контейнер отцепляется.
После этого устройство можно установить на другом контейнере. Для подъема следующего контейнера крановщик ставит катушки соленоидов 7 под напряжение, и кулачки 8, которые закреплены на концах сердечников соленоидов, втягиваются, выходя из зацепления со стаканом. Траверса перемещается
вверх, и процесс захвата крюками контейнера повторяется.
Предмет изобретения
1. Устройство для автоматической застроновки и отстроповки контейнеров, включающее раму с захватными крюками и направляющими козырьками, подвижную вдоль стоек рамы траверсу с шарнирно-рычажными механизмами управления захватными крюками и стопорным механизмом в виде управляемых электромагнитами кулачков, взаимодействующих с пазами рамы, отличающееся тем, что, с целью ограничения усилий, действующих на
крышу контейнера при его подъеме, на раме смонтированы подвил ные упоры, взаимодействующие с шарнирно-рычажными механизмами управления захватными крюками.
2. Устройство по п. 1, отличающееся тем, что подвижные упоры вынолнены в видерегулируемых подпружиненных штанг, расположенных в направляющих стоек, закрепленных на раме, в местах установки упоров.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ЗАСТРОПОВКИ И ОТСТРОПОВКИ УНИВЕРСАЛЬНЫХ КОНТЕЙНЕРОВ | 1965 |
|
SU176376A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1973 |
|
SU388997A1 |
| Грузозахватное устройство | 1979 |
|
SU850549A1 |
| Одноканатный грейфер | 1976 |
|
SU776553A3 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |
| Автоматический захват для штучных грузов | 1972 |
|
SU439459A1 |
| Вертикальный накопитель | 1989 |
|
SU1698148A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО для КОНТЕЙНЕРОВ | 1971 |
|
SU315682A1 |
| Устройство для захвата и разгрузкиКОНТЕйНЕРОВ C цАпфАМи | 1979 |
|
SU819041A1 |
| Автоматический захват | 1981 |
|
SU1004241A1 |
/ff J 7 / .„
О/ф--™- Х /
/
г.и) S U
