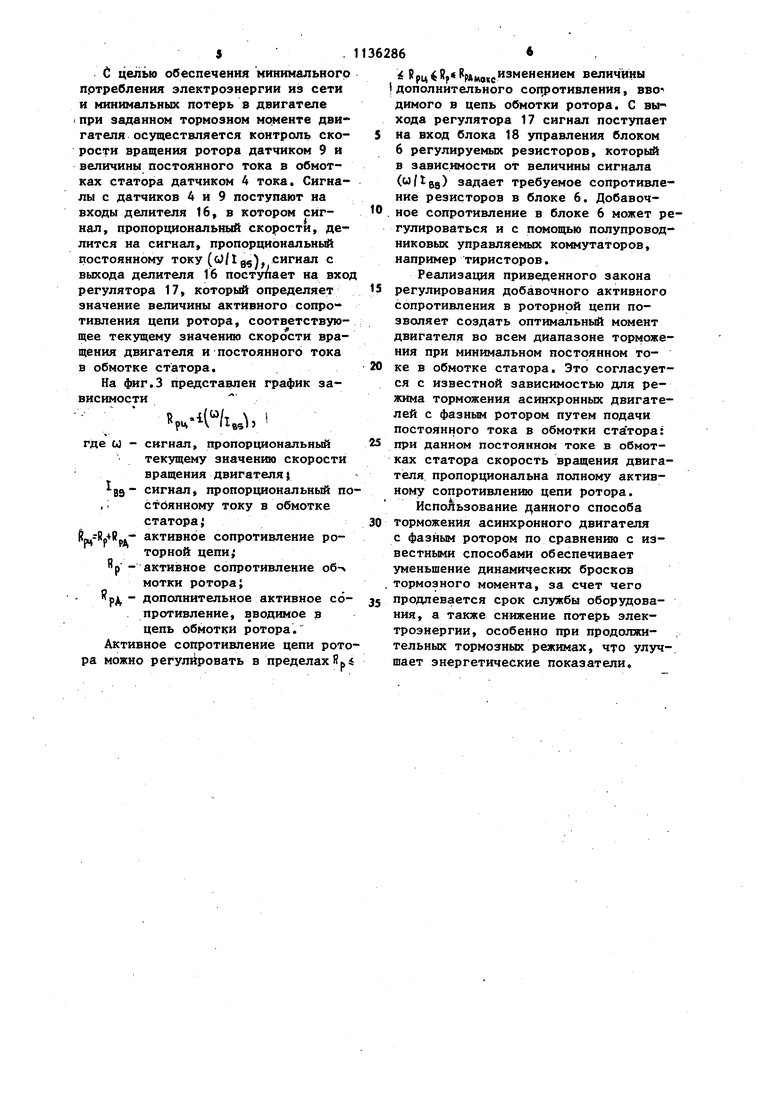
Изобретение относится к электротехнике и может быть использовано в асинхронных электроприводах механизмов в химической, металлургической и машиностроительной промышленности. Известен способ торможения асинхронного электродвигателя, при кото ром подают в статорную обмотку элек тродвигателя постоянньй ток регулируемой величины, измеряют тормозной момент на выходном валу электро двигателя, сравнивают его с заданны значением тормозного момента и регу лируют величину постоянного тока, п даваемого в статорную обмотку, в функции полученного сигнала рассогласования. lj . Однако этот способ торможения не обеспечивает постоянного заданного значения тормозного момента двигате ля при изменяющемся моменте инерции электропривода. Кроме того, при реа лизации этого способа потребляется значительная электроэнергия из сети и возникают большие потери в двигат ле. Наиболее близким к изобретению по .технической сущности и достигаемому результату является способ тор можения асинхронного электродвигателя, при котором отключают обмотку статора от источника питания, подают в статорную обмотку постоянный ток регулируемой величины, контролируют тормозной момент, отрицатель ное ускорение вала двигателя сравнивают с заданным отрицательным ускорением, с полученным результатом сравнивают измеренньй тормозной момент, по результату данного сравнения регулируют величину постоянного тока в статорной обмотке zj . Недостатками известного способа торможения являются малая плавноеть значительное потребление электроэнергии из сети и большие потери в электродвигателе, что снижает энергетические показатели. Цель изобретения - повьшение плавности торможения путем уменьшения динамических бросков тормозного момента. Поставленная цель достигается тем, что при способе торможения аси хронного электродвигателя, при кото ром отключают обмотку статора от источника питания,, подают в статорную обмотку постоянный ток, контролируют тормозной момент, отрицательное ускорение вала двигателя сравнивают с заданным отрицательным ускорением, с полученным результатом сравнивают измеренный тормозной момент, по результату данного срав нения регулируют величину постоянного тока в статорной обмотке, измеряют величину-постоянного тока, подаваемого в статор, частоту вращения вала двигателя и регулируют величину активного сопротивления роторной цепи пропорционально их отношению . со рЦ /В-; гдеЧрм величина актив1 ого сопротивления роторной цепи Igg- постоянный регулируемый тор- мозной ток в статорной обмотке; со - частота вращения вала двигателя J - коэффициент пропорциональности. На фиг.1 приведена блок-схема устройства, реализующего способ торможения асинхронного электродвигателяJ на фиг.2 - механические характеристики электродвигателяJ на фиг.З - график функциональной зависимости между величиной добавочного активного сопротивления, вводимого в цепь ротора, и скоростью вращения вала двигателя . Устройство содержит электродвигатель 1, подключенный контактами 2 коммутационного аппарата к питающей сети,две фазы которой подключаются также к входу управляемого выпрямителя 3, выход которого через датчик 4 постоянного тока и контакты 5 коммутационного аппарата подключаются к двум фазам обмотки статора электродвигателя 1, а его обмотки ротора к блоку 6 регулируемых резисторов. На валу электродвигателя 1 установлены датчик 7 момента, датчик 8 замедления ротора и датчик 9 скорости вала электродвигателя 1. На входы блока 10 сравнения подключены выходы датчика 8 замедления ротора и блока 11 задания торможения, а выход бло- i ка 10 подключается к входу регулятора 12 замедления. Входы блока 13
сравнения подключены к выходам регулятора 12 замедления и датчика 7 момента, а выход блока 13 сравнения подключен к входу регулятора 14 тормозного момента, выход которого соединен с входом блока 15 управления управляемого вьтрямителя 3. К входам делителя 16 подключены выходы датчика 9 скорости выходного вала и датчика 4 постоянного тока, а выход делителя 16 подключен к входу регулятора 17 активного сопротивления цепи ротора электродвигателя, выход которого соединен с входом блока 18 управления блоком 6 регулируемых резисторов. Вал электродвигателя 1 связан с рабочей машиной 19.
Способ торможения асинхронного электродвигателя осуществляется следующим образом.
Отключают обмотку статора от источника питания, подают в статорную обмотку постоянный ток, контролируют тормозной момент, отрицательное ускорение вала двигателя сравнивают с заданным отрицательным ускорением, с полученным результатом сравнивают измеренный тормозной момент, по результату данного сравнения регулирую величину постоянного тока в статорной обмотке, измеряют величину постоянного тока статора, частоту вращени вала двигателя и регулируют величину активного сопротивления роторной
цепи пропорционально их отношению
U йрц-и,
гдеRрц - величина активного сопротивления роторной цепи; В5 постоянный регулируемый тормозной ток в статорной обмотке;Ш - частота вращения вала двига
теля;
- коэффициент пропорциональности.
Устройство для осуществления способа торможения асинхронного электродвигателя работает следующим образом
Для торможения электродвигателя 1 он отключается от сети путем размыкания контактов 2 силового коммутационного аппарата и подключается двумя фазами обмотки статора к управ ляемому выпрямителю 3 при замыкании контактов 5. Для контроля режима торможения с заданным потреблением
электроэнергии из сети и потерями в двигателе при изменяющихся моменте статического сопротивления механизма, моменте инерции электропривода и активном с опротивлении цепи ротора измеряются с помощью датчиков 7, 8, 9 и 4 соответственно тормозной момент навалу двигателя, замедлени ротора электродвигателя, скорость или частота вращения вала двигателя и величина постоянного тока статора подаваемого в его обмотку.
Сигнал с выхода датчика 8 замедления сравнивается в блоке 10 с задаюп1им сигналом, поступающим с блок 11 задания режима торможения. Разность этих сигналов с выхода блока 10 подается на вход регулятора 12 замедления. Сигнал с выхода датчика 7 торможения момента сравнивается в блоке 13 с сигналом, поступающим с выхода регулятора 12 замедления, и их разность поступает на вход реглятора 14 тормозного момента. Сигнал с регулятора 14 поступает на вход блока 15 управления, которьш в зависимости от величины этого сигпала задает требуемый угол управления тиристорами управляемого вьтрямителя 3, а следовательно, величину постоянного тока динамического торможения и величину тормозного момента двигателя.
Лпя асинхронного двигателя с фазным ротором заданный тормозной момент может быть .получен при различных соотношениях постоянного тока в обмотках статора и активного сопротивления цепи ротора. На фиг.2 показаны механические характеристики динамического торможения, которые построены для различных токов возбуждения. I
Для каждого тока возбуждения построены три характеристики, соответствующие различным значениям активного сопротивления цепи ротора: ри, t рц
Изменяя величину Крц и влияя таким образом на наклон механической характеристики, можно получить заданный тормозной момент при изменякяцихся моменте статического сопротивления на валу двигателя и момгнте инерции электропривода при сравнительно небольших токах возбуждения .
$ .
с целью обеспечения минимального пртребления электроэнергии из сети и минимальных потерь в двигателе при заданном тормозном моменте двигателя осуществляется контроль скорости вращения ротора датчиком 9 и величины постоянного тока в обмотках статора датчиком 4 тока. Сигналы с датчиков 4 и 9 поступают на входы делителя 16, в котором сигнал, пропорциональный скорости, делится на сигнал, пропорциональный постоянному току (J/lg5)j сигнал с выхода делителя 16 поступает на вход регулятора 17, который определяет значение величины активного сопро тивления цепи ротора, соответствующее текущему значению скорости вращения двигателя и постоянного тока в обмотке статора.
На фиг.З представлен график зависимости
,
где U - сигнал, пропорциональный
текзпцему значению скорости вращения двигателя} gg- сигнал, пропорциональный по,; стоянному току в обмотке
статора;
чй - активное сопротивление роторной цепи; р - активное сопротивление об-ч
мотки ротора;
дополнительное активное сопротивление, вводимое в цепь обмотки ротора. Активное сопротивление цепи ротора можно регулировать в пределах Rp
36286
В рц 4 Rf IpAMOM величины I дополнительного сопротивления, вво- димого в цепь обмотки ротора. С вы хода регулятора 17 сигнал поступает
5 на вход блока 18 управления блоком 6 регулируемых резисторов, который в зависимости от величины сигнала (u/tgg) задает требуемое сопротивление резисторов в блоке 6. Добавоч0 . ное сопротивление в блоке 6 может регулироваться и с помощью полупровод- никовых управляемых коммутаторов, например тиристоров.
Реализация приведенного закона
15 регулирования добавочного активного сопротивления в роторной цепи позволяет создать оптимальный момент двигателя во всем диапазоне торможения при минимальном постоянном токе в обмотке статора. Это согласуется с известной зависимостью для режима торможения асинхронных двигателей с фазным ротором путем подачи постоянного тока в обмотки статора:
25 при данном постоянном токе в обмотках статора скорость вращения двигателя пропорциональна полному активному сопротивлению цепи ротора. Использование данного способа
30 торможения асинхронного двигателя с фазным ротором по сравнению с известными способами обеспечивает уменьщение динамических бросков . тормозного момента, за счет чего
35 продлевается срок службы оборудования, а также снижение потерь электроэнергии, особенно при продолжительных тормозных режимах, что улучшает энергетические показатели.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ торможения асинхронного короткозамкнутого электродвигателя | 1981 |
|
SU993421A2 |
| СПОСОБ ТОРМОЖЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2440663C2 |
| СПОСОБ ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКО-ТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2462603C2 |
| Способ торможения асинхронного электродвигателя | 1984 |
|
SU1226598A1 |
| Устройство для торможения асинхронного электродвигателя | 1982 |
|
SU1086532A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| СПОСОБ И УСТРОЙСТВО ЗАЩИТЫ СИНХРОННОГО ДВИГАТЕЛЯ ОТ АВАРИЙНОГО ТОРМОЖЕНИЯ | 2004 |
|
RU2275724C1 |
| Способ торможения с самовозбуждением трехфазного асинхронного электродвигателя | 1987 |
|
SU1436253A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1418882A1 |

СПОСОБ ТОРМОЖЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ, при котором отключают обмотку статора от источника питания, подают в статорнзто обмотку постоянный ток, контролируют тормозной момент, отрицательное ускорение вала двигателя сравнивают с заданным отрицательным ускорением, с полученным результатом сравнивают измеренньй тормозной момент, по результату данного сравнения регулируют величину постоянного тока в статорной обмотке, отличающийс я тем, что, с целью повьппения плавности торможения, измеряют величину постоянного тока, подаваемого в статор, частоту вращения вала двигателя и регулируют величину активного сопротивления роторной цепи пропорционально их отношению -kJl, рц les гдеЯрц величина активного сопротивления роторной цепи . ввпостоянней регулируемый торСП мозной ток в статорной обмотке, с U частота вращения вала двигателя; k коэффициент пропорциональности.
Jw
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ торможения асинхронного короткозамкнутого электродвигателя | 1978 |
|
SU752708A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3304359/24-07, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
