«(54) СПОСОБ ТОРМОЖЕНИЯ АСИНХРОННОГО КОРОТКОЗАМКНУТОГО ЭЛЕКТРОДВИГАТЕЛЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ торможения асинхронного электродвигателя | 1983 |
|
SU1136286A1 |
| Способ торможения асинхронного электродвигателя | 1984 |
|
SU1226598A1 |
| Способ торможения с самовозбуждением трехфазного асинхронного электродвигателя | 1987 |
|
SU1436253A1 |
| СПОСОБ ОПТИМАЛЬНОГО ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2468496C1 |
| Асинхронный электропривод | 1989 |
|
SU1663727A1 |
| Многодвигательный электропривод | 1986 |
|
SU1376206A1 |
| Электропривод переменного тока | 1984 |
|
SU1259456A1 |
| Устройство для динамического торможения асинхронного электродвигателя с фазным ротором | 1976 |
|
SU613469A1 |
| Электропривод | 1980 |
|
SU871290A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
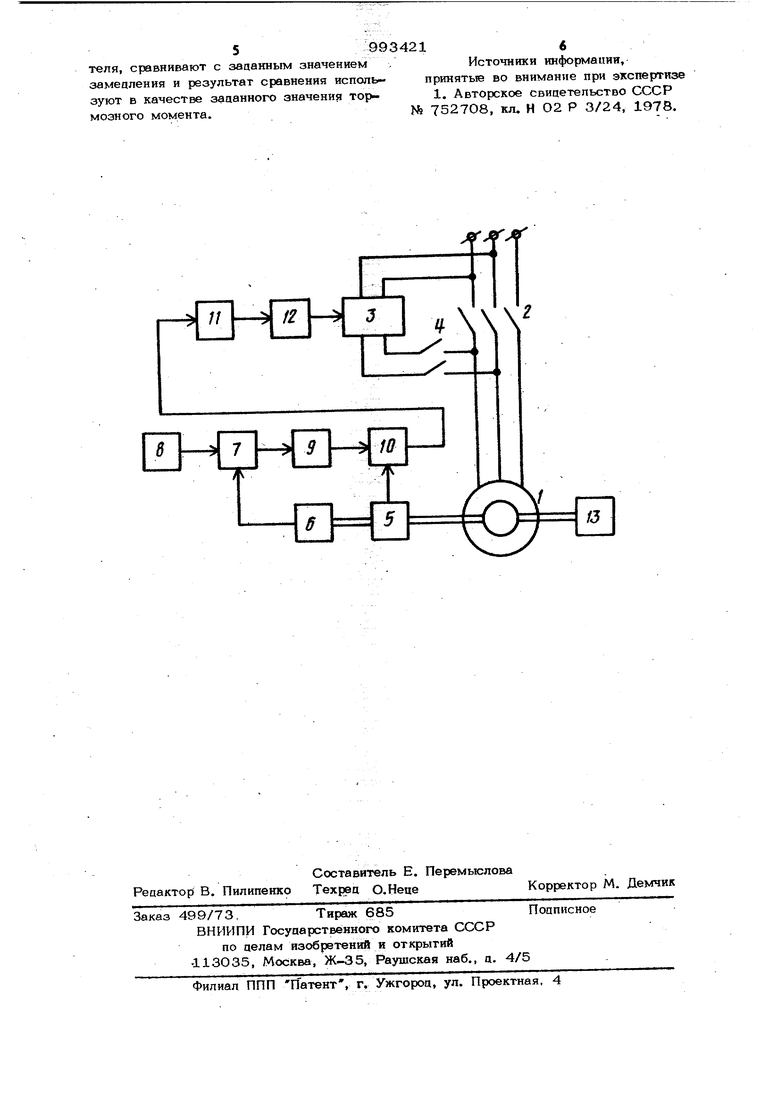
Изобретение относится к электротехнике и может быть использовано в электроприводах механизмов в химической и металлургической п мышленности. По основному авт. св. № 752708. известен способ торможения асинхронного короткозамкнутого электродвигателя путем псздачи в его статорную обмотку постоянного тока регулируемой величины, при котором измеряют тормозной момент на выходном валу электродвигателя, срав нивают его с заданным значением тормоз ного момента и регулируют величину постоянного тока, подаваемого в статор ную обмотку, в функции ползгченного сиг нала рассогласования. 1 3 . . Однако известный способ не обеспеч№ вает постоянное оптимальное значение тормозного момента двигателя при изме- няющихся моменте статического сопротивления и моменте инерции электроприво да.. Цель изобретения.-повышение эффективности торможения за счет получения постоянного оптимального значения тормозного момента электродвигателя при изменяющихся моменте статического сопротивления и моменге инерции электроприУказанная цель достигается тем, что в известней способе торможения асинх юнного короткозамкнутого электродвигателя дополнительно измеряют замедление вььхоцного вада двигателя, сравнивают его с заданным значением замедления и результат сравнения используют в качестве заданного значения тормозного Момента. На чертеже представлена блок-схема устройства, реализующего способ торможения асинхронного электродвигателя. Устройство содержит электродвигатель 1, подключенный контактами 2 коммутационного аппарата к питающей сети трехфазного переменного тока, две фазы которой подключаются также к входу управля- емого выпрямителя 3, выход которого подключается через контакты 4 коммутационного аппарата к двум фазам обмотки 99 статора электропвигателя 1. На валу электродвигателя установлены датчик 5 момента и цатчик 6 замедления ротора электродвигателя. На входы блока 7 сра нения подключены выходы датчика 6 за- медления ротора и блока 8 задания торможения, а выход блока 7 подключаетс к входу регулятора 9 замедления. Входы блока 10 сравнения подключены к выходам регулятора 9 замедления и датчика 5 момента, а выход блока 10 сравнения подключен к входу регулятора 11 тормозного момента, выход которого под ключен к входу блока 12 управления управляемого выпрямителя 3, Вал электр двигателя 1 связан с рабочей машиной 1 Способ торможения асинхронного коро козамкнутого электродвигателя осушест- вляется следующим образом. Для торяиожейия электродвигателя 1 он отключается от сети путем размыкания контактов 2 силового коммутационного аппарата и подключается двумя фазами обмотки статора к управляемому выпрямителю 3 при замыкании контактов 4. Для обеспечения оптимального режима торможения при изменяющихся моменте статического сопротивления и моменте инерции электропривода измеряются с помощью датчиков 6 и 6 соответственно тормозной момент на валу двигателя и замедление электродвигателя. Выходные сигналы с датчиков 5 и 6 поступают в систему подчиненного регулирования двигателем при торможении. Сигнал с выход датчика 6 замедления сравнивается с шим сигналом, поступающим с блока 8 задания торможения, в блоке 7 и их разность подается на вход регулятора 9 замедления. Сигнал с выхода датчика 5 момента сравнивается в блоке 10 с сигналом, поступающим с регулятора 9 замедления и их разность поступает на вход регулятора 11 тормозного момента. Сигнал с регулятора 11 поступает на вход блока 12 управления, который в зависимости от величины этого сигнала задает требуемый угол управления тиристорами управляемого выпрямителя 3, а следовательно, величину тока динамического торможения и величину тормозного момен та двигателя. Получение постоянного оптимального значения тормозного момента электроцви гателя согласуется с уравнением динамики электропривода , 1 где М - тормозной момент электродвигателя; )j4-p - момент статического сопротивления электропривода; 3 - момент инерции электропривода (включает момент инерции ротора электродвигателя и приведенный к валу двигателя момент инерции рабочей машины); а - замедление ротора электродвигателя. Из уравнения следует, что измерение только момента на валу при изменяющихся М и не обеспечит оптимизацию Только дополнительное изторможениямерение замедления и сравнение его с заданным при сохранении измерения момента на валу обеспечивает оптимизацию тормозного режима электродвигателя, Оптимизация производится двухконтурной системой с подчиненным регулированием. Использование предлагаемого способа торможения асинхронного короткозамкнутого двигателя по сравнению с известными способами обеспечивает оптимальное торможение при изменяющихся в процессе торможения момента статического сопротивления на валу электродвигателя и моменте инерциии электродвигателя. Следовательно, оптимальное торможение обеспечивается практически для всех механизмов. В результате оптимизируется тормозной момент и замедление привода и исключаются к ритические тормозные моменты и замедления. Таким образом, применение предлагаемого способа торможения позволяет повысить надежность непосредственно асинхронного двигателя, передаточного механизма (например, редуктора, электромагнитной муфты и т.д.) и рабочей машины, а также повысить срок их службы, Кроме этого, способ торможения позволяет оптимизировать время торможения электропривода и минимизировать потери в асинхронном двигателе и электроэнергию, потребляемую из сети. Формула изобретения Способ торможения асинхронного короткозамкнутого электродвигателя по авт. св. №752708, отличающийся тем, что, с целью повышения эффективности торможения, дополнительно измеряют замедление выходного вала электродвигателя, сравнивают с зацанным значением замедления и результат сравнення используют в качестве з цанного значени тормозного момента.
Источники информации, принятые во внимание при экспертизе
