5
j1
СО О5 00
5
СП
Фиг.1
2.Брусья по п. 1, отличающиеся тем, что, с целью обеспечения дистанционного управления, они имеют датчики положения жердей, указатель положения жердей, задатчик дистанционной установки размера между жердями, причем выходы задатчика и указателя через устройство сравнения подключены к схеме управления электродвигателями.
3.Брусья по п. 1, отличающиеся тем, что, с целью повышения точности поддержания постоянного натяжения тросов при разведении жердей, каждое средство для автоматического поддержания натяжения тросов имеет корректирующий узел, включающий установленную на больщей стойке вертикальную линейку увеличивающегося поперечного сечения по высоте и тяги, каждая из которых одним концом шарнирно смонтирована на гайке и несет на свободном конце ролик, при этом роЛики тяг установлены с возможностью контактирования с рабочей и противоположной поверхностями линейки, а конец ветви троса, охватывающей блок больщей стойки, охватывает один из роликов корректирующего узла и закреплен на другом.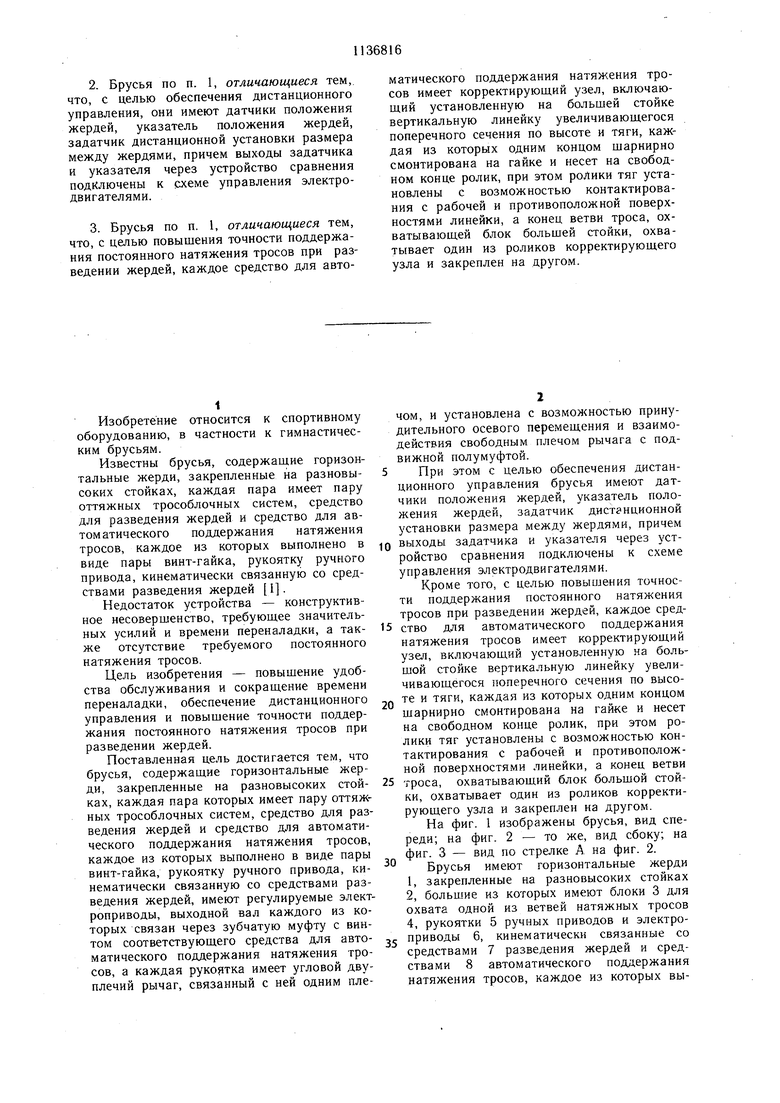
| название | год | авторы | номер документа |
|---|---|---|---|
| Брусья гимнастические | 1984 |
|
SU1238767A1 |
| Брусья гимнастические | 1983 |
|
SU1551387A1 |
| Разновысокие брусья | 1972 |
|
SU597374A1 |
| Устройство для тренировки | 1990 |
|
SU1747098A1 |
| ЛЕБЕДКА | 2009 |
|
RU2401242C1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Ручной ковроткацкий станок | 1991 |
|
SU1817793A3 |
| АГРЕГАТНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК И НАСАДКА К НЕМУ | 1999 |
|
RU2161554C1 |
| ТВЕРДОМЕР | 2014 |
|
RU2550375C1 |
| Стенд для сборки и вращения в процессе сварки кольцевых стыков обечаек | 1977 |
|
SU732109A1 |
1. БРУСЬЯ, содержащие горизонтальные жерди, закрепленные на разновысоких стойках, каждая пара которых имеет пару оттяжных трособлочных систем, средство для разведения жердей и средство для автоматического поддержания натяжения тросов, каждое из которых выполнено в виде пары винт-гайка, рукоятку ручного привода, кинематически связанную со средствами разведения жердей, отличающиеся тем, что, с целью повышения удобства обслуживания и сокращения времени переналадки, они имеют регулируемые электроприводы, выходной вал каждого из которых связан через зубчатую муфту с винтом соответствующего средства для автоматического поддержания натяжения тросов, а каждая рукоятка имеет угловой двуплечий рычаг, связанный с ней одним плечом, и установлена с возможностью прину- § дительного осевого перемещения и взаимо- действия свободным плечом рычага с под- Л вижной полумуфтой.
Изобретение относится к спортивному оборудованию, в частности к гимнастическим брусьям.
Известны брусья, содержац ие горизонтальные жерди, закрепленные на разновысоких стойках, каждая пара имеет пару оттяжных трособлочных систем, средство для разведения жердей и средство для автоматического поддержания натяжения тросов, каждое из которых выполнено в виде пары винт-гайка, рукоятку ручного привода, кинематически связанную со средствами разведения жердей 1.
Недостаток устройства - конструктивное несовершенство, требующее значительных усилий и времени переналадки, а также отсутствие требуемого постоянного натяжения тросов.
Цель изобретения - повышение удобства обслуживания и сокращение времени переналадки, обеспечение дистанционного управления и повыщение точности поддержания постоянного натяжения тросов при разведении жердей.
Поставленная цель достигается тем, что брусья, содержащие горизонтальные жерди, закрепленные на разновысоких стойках, каждая пара которых имеет пару оттяжных трособлочных систем, средство для разведения жердей и средство для автоматического поддержания натяжения тросов, каждое из которых выполнено в виде пары винт-гайка, рукоятку ручного привода, кинематически связанную со средствами разведения жердей, имеют регулируемые электроприводы, выходной вал каждого из которых связан через зубчатую муфту с винтом соответствующего средства для автоматического поддержания натяжения тросов, а каждая рукоятка имеет угловой двуплечий рычаг, связанный с ней одним плечом, и установлена с возможностью принудительного осевого перемещения и взаимодействия свободным плечом рычага с подвижной полумуфтой.
При этом с целью обеспечения дистанционного управления брусья имеют датчики положения жердей, указатель положения жердей, задатчик дистанционной установки размера между жердями, причем
0 выходы задатчика и указателя через устройство сравнения подключены к схеме управления электродвигателями.
Кроме того, с целью повьшления точности поддержания постоянного натяжения тросов при разведении жердей, каждое средство для автоматического поддержания натяжения тросов имеет корректирующий узел, включающий установленную на большой стойке вертикальную линейку увеличивающегося поперечного сечения по высоQ те и тяги, каждая из которых одним концом щарнирно смонтирована на гайке и несет на свободном конце ролик, при этом ролики тяг установлены с возможностью контактирования с рабочей и противоположной поверхностями линейки, а конец ветви
троса, охватывающий блок большой стойки, охватывает один из роликов корректирующего узла и закреплен на другом.
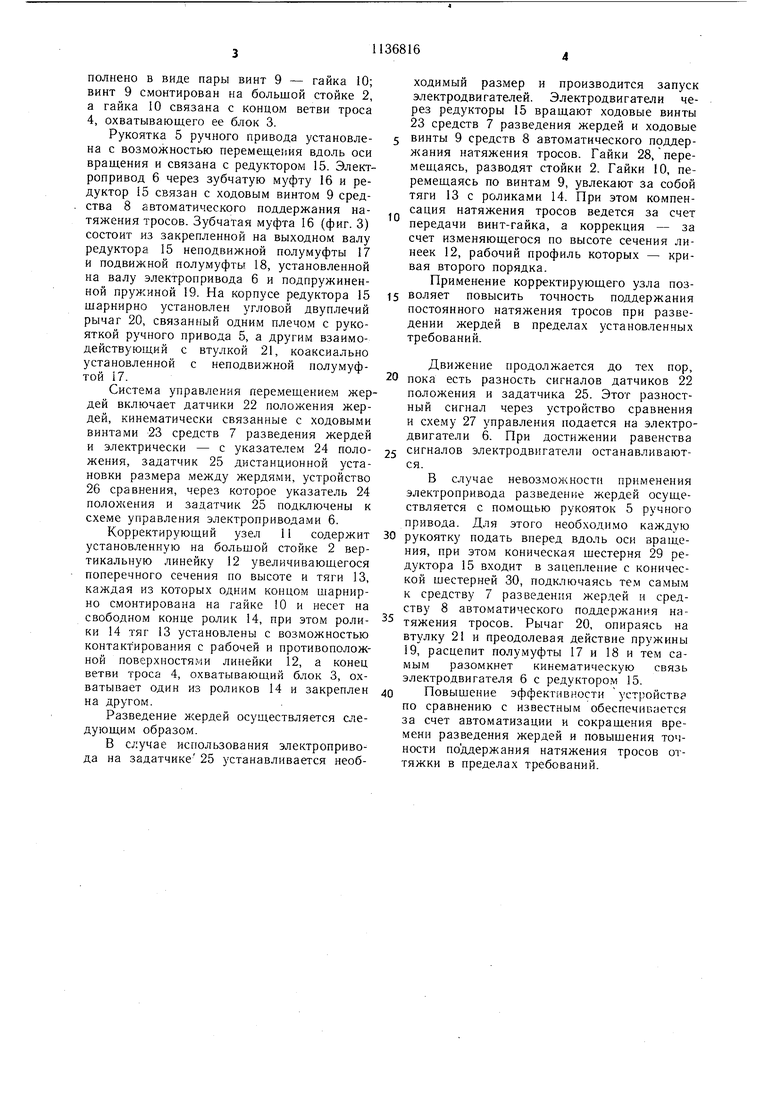
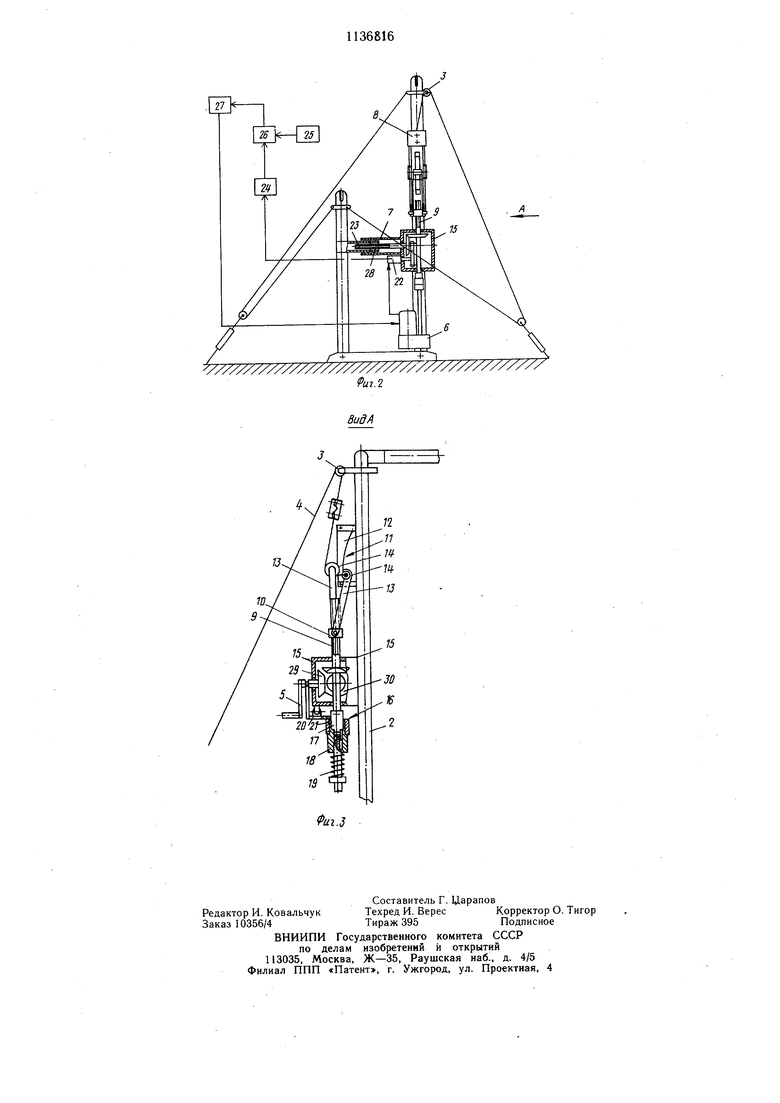
На фиг. 1 изображены брусья, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - вид по стрелке А на фиг. 2. Брусья имеют горизонтальные жерди
1,закрепленные на разновысоких стойках
2,большие из которых имеют блоки 3 для охвата одной из ветвей натяжных тросов 4, рукоятки 5 ручных приводов и электрог приводы 6, кинематически связанные со средствами 7 разведения жердей и средствами 8 автоматического поддержания натяжения тросов, каждое из которых выполнено в виде пары винт 9 - гайка 10; винт 9 смонтирован на большой стойке 2, а гайка 10 связана с концом ветви троса 4, охватывающего ее блок 3.
Рукоятка 5 ручного привода установлена с возможностью перемещения вдоль оси вращения и связана с редуктором 15. Электропривод 6 через зубчатую муфту 16 и редуктор 15 связан с ходовым винтом 9 средства 8 автоматического поддержания натяжения тросов. Зубчатая муфта 16 (фиг. 3) состоит из закрепленной на выходном валу редуктора 15 неподвижной полумуфты 17 и подвижной полумуфты 18, установленной на валу электропривода 6 и подпружиненной пружиной 19. На корпусе редуктора 15 щарнирно установлен угловой двуплечий рычаг 20, связанный одним плечо.м с рукояткой ручного привода 5, а другим взаимодействующий с втулкой 21, коаксиально установленной с неподвижной полумуфтой 17.
Система управления пере.мещение.м жердей включает датчики 22 положения жердей, кинематически связанные с ходовыми винтами 23 средств 7 разведения жердей и электрически - с указателем 24 положения, задатчик 25 дистанционной установки размера между жердями, устройство 26 сравнения, через которое указатель 24 положения и задатчик 25 подключены к схеме управления электропривода.ми 6.
Корректирующий узел 11 содержит установленную на больщой стойке 2 вертикальную линейку 12 увеличивающегося поперечного сечения по высоте и тяги 13, каждая из которых одним концом шарнирно смонтирована на гайке 10 и несет на свободном конце ролик 14, при этом ролики 14 тяг 13 установлены с возможностью контактирования с рабочей и противоположной поверхностями линейки 12, а конец ветви троса 4, охватывающий блок 3, охватывает один из роликов 14 и закреплен на другом.
Разведение жердей осуществляется следующим образом.
В случае использования электропривода на задатчике 25 устанавливается необходимый размер и производится запуск электродвигателей. Электродвигатели через редукторы 15 вращают ходовые винты 23 средств 7 разведения жердей и ходовые винты 9 средств 8 автоматического поддержания натяжения тросов. Гайки 28, перемещаясь, разводят стойки 2. Гайки 10, перемещаясь по винтам 9, увлекают за собой тяги 13 с роликами 14. При этом компенсация натяжения тросов ведется за счет передачи винт-гайка, а коррекция - за счет изменяющегося по высоте сечения линеек 12, рабочий профиль которых - кривая второго порядка.
Применение корректирующего узла позволяет повысить точность поддержания постоянного натяжения тросов при разведении жердей в пределах установленных требований.
Движение продолжается до тех пор,
0 пока есть разность сигналов датчиков 22 положения и задатчика 25. Этот разностный сигнал через устройство сравнения и схе.му 27 управления подается на электродвигатели 6. При достижении равенства
5 сигналов электродвигатели останавливаются.
В случае невозможности применения электропривода разведение жердей осуществляется с помощью рукояток 5 ручного привода. Для этого необходи.мо каждую
0 рукоятку подать вперед вдоль оси вращения, при этом коническая шестерня 29 редуктора 15 входит в зацепление с конической шестерней 30, подключаясь тем самым к средству 7 разведения жердей и средству 8 автоматического поддержания натяжения тросов. Рычаг 20, опираясь на втулку 21 и преодолевая действие пружины 19, расцепит полу.муфты 17 и 18 и тем самым разомкнет кинематическую связь электродвигателя 6 с редуктором 15.
0 Повышение эффективности устройства по сравнению с известным обеспечивается за счет автоматизации и сокращения времени разведения жердей и повышения точности поддержания натяжения тросов оттяжки в пределах требований.
/////////////// ///7/y//////y//////////7/7/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ УКЛАДКИ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО СЛОЯ МАТЕРИАЛА НА РЕЛЬЕФНУЮ ПРЕСС-ФОРМУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2423236C2 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
