Изобретение относится к области судостроения и может быть использовано при определении метацентрической высоты подводных и надводных объектов.
Изобретение может также использоваться при проведении мореходных испытаний подводных и надводных объектов для регистрации параметров качки.
Известны способы определения метацентрической высоты методом кренования с помощью визуальных замеров с применением весков, инклинографов, оптических угломеров и прочих приборов для визуального измерения углов крена (www.moryak.biz, www.infopedia.su).
Такие способы являются трудоемкими, поскольку процесс регистрации не автоматизирован. Они могут приводить к неточностям и ошибкам измерений, так как сильно зависят от человеческого фактора и качества визуальных замеров, а также не позволяют записывать цифровой массив данных для дальнейшей обработки на ЭВМ, что снижает качество и увеличивает время получения результатов.
Наиболее близким к заявляемому изобретению является «Способ определения метацентрической высоты судна и система для его осуществления» (патент RU №2240254 С1, МПК В63В 39/00, дата публикации 20.11.2004), взятый за прототип. По этому способу определение метацентрической высоты h судна водоизмещением D осуществляется путем кренования судна моментом Мкр, с помощью измерения приращения угла крена Δθ и вычисления метацентрической высоты h по формуле h=Mкр/D⋅Δθ, при этом одновременно с кренованием судна определяют скорость изменения приращения угла крена, а измерение приращения угла крена проводят при нулевой скорости его измерения.
Недостатки способа-прототипа заключаются в следующем.
Измерение приращения угла крена производят при нулевой скорости его изменения, однако в процессе кренования в реальных морских условиях при наличии волнения скорость изменения угла крена может стабилизироваться длительное время. При этом, допустимость начала регистрации данных с точки зрения влияния бортовой качки, а также возможность окончания регистрации исходя из выполнения условия по точности определения осредненного значения угла крена, не определяют. Это может сказаться на качестве получаемых результатов при наличии волнения, а также требует дополнительного времени и трудозатрат, что бывает проблематично при выполнении кренования в реальных морских условиях.
Известно устройство «Статодинамический кренометр» (патент RU №2057679 МПК: В63В 39/14, опубликован 10.04.1996), содержащее акселерометр и табло статического и динамического углов крена, снабженный измерителем угловых ускорений, вычислительным блоком и табло полного угла крена, причем вычислительный блок выполнен двухканальным и включает в себя сумматор, подключенный к выходам упомянутых каналов, при этом выходы акселерометра и измерителя угловых ускорений подключены к входу вычислительного блока, выходы которого подключены к соответствующим табло статического, динамического и полного углов крена.
Недостатками данного прибора является отсутствие в вычислительном блоке модуля математической обработки регистрируемых данных для определения допустимости начала и возможности окончания регистрации данных, а также отсутствие этих данных на табло. Кроме того, прибор не способен с достаточной точностью измерять данные при проведении кренования, а также излишне громоздкий и включает необязательные компоненты, такие как измерители ускорений. При этом работа с прибором усложняется за счет отсутствия в приборе слота под карту памяти для передачи информации на ЭВМ для ее дальнейшей обработки.
Наиболее близким к изобретению устройством, взятым за прототип, является «Комплекс для проведения опытов кренования судна» (патент RU №76629 U1, МКИ: В63В 39/14, опубликован 27.08.2008), содержащий вычислительный блок, измеритель угла наклона с прецизионным двухкоординатным датчиком угла наклона с автономным источником питания, выход которого подключен к аналого-цифровому преобразователю вычислительного блока с персональным компьютером, содержащим программный пакет обработки данных опыта кренования.
Недостатки устройства-прототипа следующие.
Регистрация данных с помощью устройства, выбранного за прототип, затруднена ввиду отсутствия математической обработки регистрируемых данных, что приводит к увеличению трудозатрат и времени проведения испытаний. В устройстве отсутствует слот под карту памяти для передачи информации на ЭВМ для ее дальнейшей обработки, вместо этого выполнено подключение устройства непосредственно к персональному компьютеру. Это увеличивает габариты устройства и затрудняет его использование в ограниченных стесненных пространствах, что особенно критично для подводных объектов.
Задача изобретения заключается в повышении точности определения метацентрической высоты, повышении качества проведения опытов кренования за счет сокращения времени и трудозатрат и упрощения процесса регистрации и обработки данных.
Поставленная задача достигается тем, что при определении метацентрической высоты подводных и надводных объектов водоизмещением D путем кренования объектов моментом Мкр, измерения приращения угла крена Δθ с помощью электронного угломерного прибора и вычисления метацентрической высоты по формуле  перед началом кренования определяют допустимость начала регистрации данных исходя из амплитуды бортовой качки или амплитуды отклонений математического ожидания угла крена, а в процессе кренования определяют возможность окончания регистрации исходя из выполнения условия по точности определения осредненного значения угла крена, проверяемого по значениям амплитуды отклонений математического ожидания угла крена в выбранном интервале времени. Устройство электронного угломерного прибора содержит корпус, прецизионный датчик угла наклона, аналого-цифровой преобразователь, вычислительный блок, автономный источник питания. Вычислительный блок содержит модуль математической обработки регистрируемых данных, служащий для вычисления амплитуды изменения угла крена, т.е. амплитуды бортовой качки, и амплитуды отклонений математического ожидания угла крена в выбранном интервале времени, при этом прецизионный датчик угла наклона через аналого-цифровой преобразователь соединен с вычислительным блоком. Корпус снабжен встроенным в него дисплеем вывода результатов, служащим для отображения зарегистрированных и математически обработанных данных. Также корпус снабжен слотом типа SD, содержащим носитель электронной информации, позволяющим производить запись результатов измерений для последующей передачи на ЭВМ для обработки. Также корпус снабжен блоком электропитания, состоящим из автономного источника питания и преобразователя внешнего питания, при этом блок электропитания подключен к прецизионному датчику угла наклона, аналого-цифровому преобразователю и вычислительному блоку, соединенному параллельно со слотом типа SD и дисплеем вывода результатов. Корпус установлен на гладкое стальное основание, обеспечивающее устойчивое положение при креновании.
перед началом кренования определяют допустимость начала регистрации данных исходя из амплитуды бортовой качки или амплитуды отклонений математического ожидания угла крена, а в процессе кренования определяют возможность окончания регистрации исходя из выполнения условия по точности определения осредненного значения угла крена, проверяемого по значениям амплитуды отклонений математического ожидания угла крена в выбранном интервале времени. Устройство электронного угломерного прибора содержит корпус, прецизионный датчик угла наклона, аналого-цифровой преобразователь, вычислительный блок, автономный источник питания. Вычислительный блок содержит модуль математической обработки регистрируемых данных, служащий для вычисления амплитуды изменения угла крена, т.е. амплитуды бортовой качки, и амплитуды отклонений математического ожидания угла крена в выбранном интервале времени, при этом прецизионный датчик угла наклона через аналого-цифровой преобразователь соединен с вычислительным блоком. Корпус снабжен встроенным в него дисплеем вывода результатов, служащим для отображения зарегистрированных и математически обработанных данных. Также корпус снабжен слотом типа SD, содержащим носитель электронной информации, позволяющим производить запись результатов измерений для последующей передачи на ЭВМ для обработки. Также корпус снабжен блоком электропитания, состоящим из автономного источника питания и преобразователя внешнего питания, при этом блок электропитания подключен к прецизионному датчику угла наклона, аналого-цифровому преобразователю и вычислительному блоку, соединенному параллельно со слотом типа SD и дисплеем вывода результатов. Корпус установлен на гладкое стальное основание, обеспечивающее устойчивое положение при креновании.
Кроме того, использование автономного источника питания, компактные размеры и отсутствие непосредственной связи с ЭВМ позволяют размещать устройство в труднодоступных местах на кренуемых объектах.
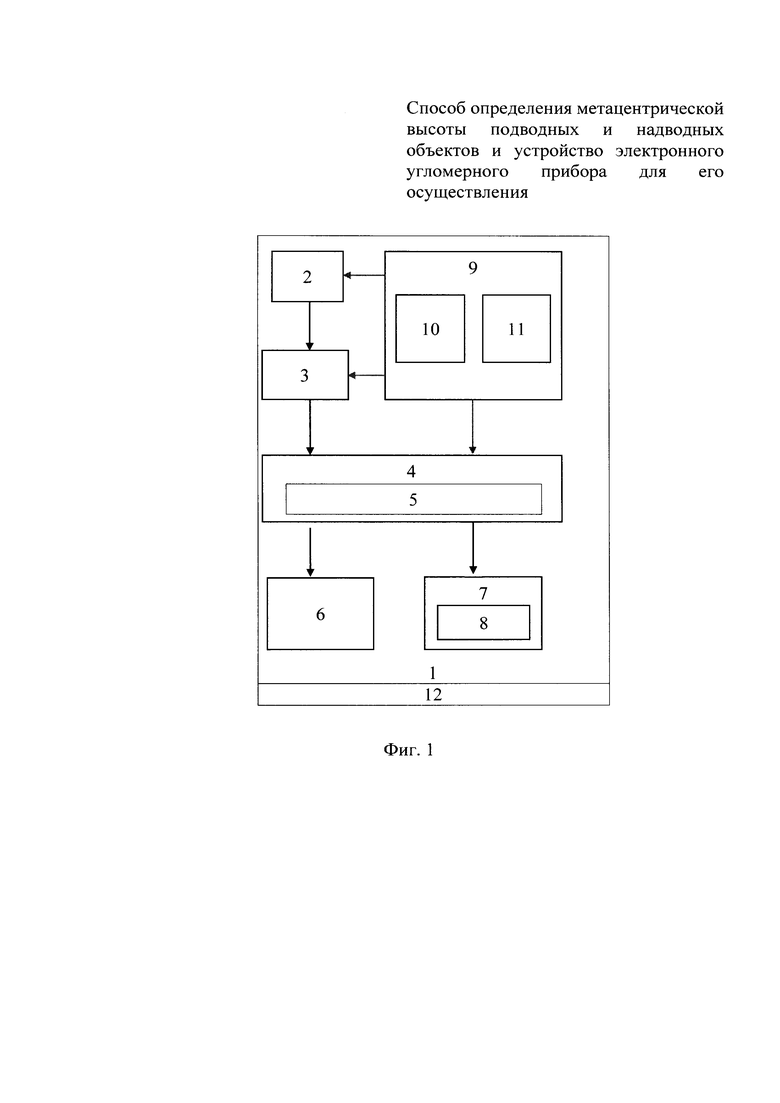
Сущность заявляемого изобретения поясняется чертежом (фиг. 1), на котором показана блок-схема устройства электронного угломерного прибора.
Устройство электронного угломерного прибора состоит из корпуса 1, включающего в себя прецизионный датчик угла наклона 2, который через аналого-цифровой преобразователь 3 соединен с вычислительным блоком 4 внутри корпуса 1. Вычислительный блок 4 содержит модуль математической обработки регистрируемых данных 5, служащий для вычисления математического ожидания, т.е. осредненного значения угла крена, амплитуды изменения угла крена и амплитуды отклонений математического ожидания угла крена в выбранном интервале времени. Корпус 1 снабжен встроенным в него дисплеем вывода результатов 6, слотом типа SD 7, содержащим носитель электронной информации 8, а также блоком электропитания 9. Вычислительный блок 4 соединен внутри корпуса 1 параллельно с дисплеем вывода результатов 6, а также слотом типа SD 7, снабженным носителем электронной информации 8. Блок электропитания 9, встроенный в корпус 1, состоящий из автономного источника питания 10 и преобразователя внешнего питания 11, подключен к прецизионному датчику угла наклона 2, аналого-цифровому преобразователю 3 и вычислительному блоку 4. Корпус 1 установлен на гладкое стальное основание 12, обеспечивающее устойчивое состояние устройства в процессе регистрации и обработки данных.
Способ определения метацентрической высоты подводных и надводных объектов, и работа заявляемого устройства осуществляются следующим образом.
При условии готовности к проведению кренования, устройство размещают на кренуемом объекте и включают питание от автономного источника питания 10 или от преобразователя внешнего питания 11, подключенного к сети. При этом получаемые от прецизионного датчика угла наклона 2 значения углов крена через аналого-цифровой преобразователь 3 поступают в вычислительный блок 4, где в модуле математической обработки регистрируемых данных 5 происходит их обработка, после чего полученные данные из вычислительного блока 4 выводятся на дисплей отображения информации 6 в следующем составе:
1) текущее значение угла крена Θ;
2) математическое ожидание, т.е. осредненное значение угла крена МО(Θ);
3) амплитуда изменения угла крена, т.е. бортовой качки, в пределах одного периода колебаний А(Θ);
4) амплитуда отклонений математического ожидания угла крена в выбранном интервале времени, определяющаяся по формуле

где А - амплитуда;
ΔМО - отклонение математического ожидания;
θ - угол крена;
i - порядковый номер;
t - время;
n - количество секунд, за которое определяется амплитуда отклонений математического ожидания угла крена.
Перед началом кренования производят оценку допустимости начала регистрации данных по выводимым на дисплей вывода результатов 6 параметрам. Оценку производят сравнением значений амплитуды колебания угла крена в пределах одного периода колебаний А(Θ) с граничными значениями амплитуды бортовой качки, которые установлены нормативно-методическими документами классификационных обществ для объекта кренования. Также оценку, при необходимости, производят по амплитуде отклонений математического ожидания угла крена в выбранном интервале времени А[ΔМО(θi)], значения которой сравнивают с критериями погрешности определения углов крена.
Критерии погрешности определения углов крена определяют следующим образом.
Метацентрическую высоту объектов при их креновании определяют по формуле
где h - метацентрическая высота объекта;
Мкр - создаваемый кренящий момент;
D - водоизмещение объекта;
Δθ - осредненное значение изменения угла крена.
Отсюда следует, что при наличии погрешности в определении метацентрической высоты и погрешности измерения угла крена:
Мкр = D ⋅ (h - dh) ⋅ sin(θ + dθ)
или
Мкр = D ⋅ (h + dh) ⋅ sin(θ - dθ)
где dh - погрешность в определении метацентрической высоты;
dθ - погрешность измерения угла крена.
В предположении, что угол θ положительный, получают неравенства:
Мкр=D ⋅ h ⋅ sin θ ≤ D ⋅ h ⋅ θ
Мкр=D ⋅ (h - dh) ⋅ sin (θ + dθ) ≤ D ⋅ (h - dh) ⋅ (θ + dθ)
Мкр=D ⋅ (h + dh) ⋅ sin (θ - dθ) ≤ D ⋅ (h + dh) ⋅ (θ - dθ)
Вычитая неравенства получают
0 ≤ D ⋅ [h ⋅ θ - (h - dh) ⋅ (θ + dθ)]
0 ≤ D ⋅ [h ⋅ θ - (h + dh) ⋅ (θ - dθ)]
Отсюда получают:
(h - dh) ⋅ (θ+dθ) ≤ h ⋅ θ
(h + dh) ⋅ (θ - dθ) ≤ h ⋅ θ
Преобразуя неравенства получают критерии погрешности определения углов крена:
Так, например, в предположении о максимальном значении метацентрической высоты объекта 0,50 м, минимальных изменениях угла крена в процессе кренования 1° и точности определения метацентрической высоты Δh=0,005 м (ввиду округления метацентрической высоты до 0,01 м), получают:

В случае выполнения условия по допустимости начала регистрации начинают регистрацию указанных выше параметров с индикацией текущих параметров на дисплее вывода результатов 6 и записью зарегистрированных данных в файл на носитель электронной информации 8.
В процессе регистрации данных определяют возможность окончания регистрации данных исходя из условия по точности определения осредненного значения угла крена, что означает достижение математического ожидания угла крена МО(Θ) стабильного значения, определяющееся по значениям амплитуды отклонений математического ожидания угла крена в выбранном интервале времени А[ΔМО(θi)], отображаемых на дисплее вывода результатов 6, которые сравнивают с критериями погрешностей определения углов крена, показанными выше и рассчитанными для конкретных объектов.
В случае выполнения условия по достаточности зарегистрированных данных, заканчивают запись, при этом на дисплее вывода результатов 6 отображаются последние зарегистрированные параметры, а на носителе электронной информации 8 формируется файл регистрации указанных параметров.
После проведения серии перемещений крен-балласта, по полученным значениям математического ожидания, то есть осредненного значения угла крена для перемещений крен-балласта на противоположные борта объекта, производят определение метацентрической высоты объекта по формуле
При необходимости дальнейшей обработки (например, выбраковки вредного сигнала, сравнении с результатами записи других устройств, проверки условий по точности и так далее), а также выполнения расчетов и составления отчетов по кренованию объекта, файл регистрации данных с помощью носителя электронной информации 8 переписывают на ЭВМ.
Таким образом, предлагаемое изобретение позволяет повысить точность определения метацентрической высоты подводных и надводных объектов, сократить время и трудозатраты при проведении кренования, повышает качество и облегчает процесс регистрации и обработки данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управляемого изменения крена автономного необитаемого подводного аппарата | 2024 |
|
RU2823820C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ СУДНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240254C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРИСОЕДИНЕННЫХ МАСС, МОМЕНТОВ ИНЕРЦИИ И ДЕМПФИРОВАНИЯ МОДЕЛЕЙ СУДОВ МЕТОДАМИ ИХ СВОБОДНЫХ КОЛЕБАНИЙ В ЖИДКОСТИ | 2009 |
|
RU2425343C1 |
| АКТИВНЫЙ УСПОКОИТЕЛЬ БОРТОВОЙ КАЧКИ СУДНА | 2015 |
|
RU2616505C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| Способ контроля остойчивости судна | 1990 |
|
SU1782863A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СИЛ ПРИСОЕДИНЕННОЙ ИНЕРЦИИ И ДЕМПФИРОВАНИЯ ТЕЛ МЕТОДАМИ ИХ СВОБОДНЫХ ЗАТУХАЮЩИХ КОЛЕБАНИЙ В ЖИДКОСТИ | 2009 |
|
RU2425344C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА НА РАЗРУШАЮЩЕМСЯ ВОЛНЕНИИ | 2011 |
|
RU2455190C1 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
Изобретение относится к области судостроения и может быть использовано при определении метацентрической высоты подводных и надводных объектов. Предложен способ определения метацентрической высоты подводных и надводных объектов водоизмещением D, который осуществляется путем кренования объектов моментом Мкр, измерения приращения угла крена Δθ с помощью электронного угломерного прибора и вычисления метацентрической высоты по формуле  При этом перед началом кренования определяют допустимость начала регистрации данных исходя из амплитуды бортовой качки или амплитуды отклонений математического ожидания угла крена. В процессе кренования определяют возможность окончания регистрации исходя из выполнения условия по точности определения осредненного значения угла крена, проверяемого по значениям амплитуды отклонений математического ожидания угла крена в выбранном интервале времени. Предложено также устройство электронного угломерного прибора для осуществления данного способа определения метацентрической высоты. Технический результат заключается в повышении точности определения метацентрической высоты, повышении качества проведения опытов кренования за счет сокращения времени и трудозатрат и упрощения процесса регистрации и обработки данных. 2 н.п. ф-лы, 1 ил.
При этом перед началом кренования определяют допустимость начала регистрации данных исходя из амплитуды бортовой качки или амплитуды отклонений математического ожидания угла крена. В процессе кренования определяют возможность окончания регистрации исходя из выполнения условия по точности определения осредненного значения угла крена, проверяемого по значениям амплитуды отклонений математического ожидания угла крена в выбранном интервале времени. Предложено также устройство электронного угломерного прибора для осуществления данного способа определения метацентрической высоты. Технический результат заключается в повышении точности определения метацентрической высоты, повышении качества проведения опытов кренования за счет сокращения времени и трудозатрат и упрощения процесса регистрации и обработки данных. 2 н.п. ф-лы, 1 ил.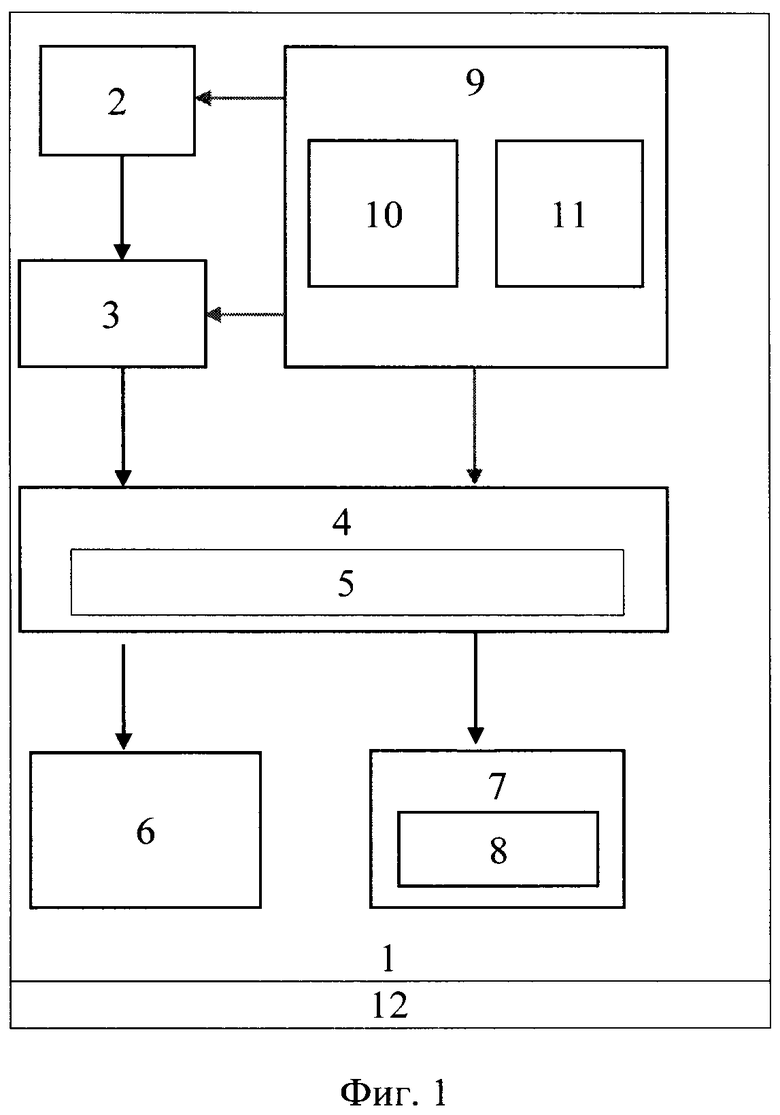
1. Способ определения метацентрической высоты подводных и надводных объектов водоизмещением D путем кренования объектов моментом Мкр, измерения приращения угла крена Δθ с помощью электронного угломерного прибора и вычисления метацентрической высоты по формуле  , отличающийся тем, что перед началом кренования определяют допустимость начала регистрации данных исходя из амплитуды бортовой качки или амплитуды отклонений математического ожидания угла крена; в процессе кренования определяют возможность окончания регистрации исходя из выполнения условия по точности определения осредненного значения угла крена, проверяемого по значениям амплитуды отклонений математического ожидания угла крена в выбранном интервале времени.
, отличающийся тем, что перед началом кренования определяют допустимость начала регистрации данных исходя из амплитуды бортовой качки или амплитуды отклонений математического ожидания угла крена; в процессе кренования определяют возможность окончания регистрации исходя из выполнения условия по точности определения осредненного значения угла крена, проверяемого по значениям амплитуды отклонений математического ожидания угла крена в выбранном интервале времени.
2. Устройство электронного угломерного прибора, содержащее корпус, прецизионный датчик угла наклона, аналого-цифровой преобразователь, вычислительный блок, автономный источник питания, отличающееся тем, что вычислительный блок содержит модуль математической обработки регистрируемых данных, служащий для вычисления амплитуды изменения угла крена, т.е. амплитуды бортовой качки, и амплитуды отклонений математического ожидания угла крена в выбранном интервале времени, при этом прецизионный датчик угла наклона через аналого-цифровой преобразователь соединен с вычислительным блоком; корпус снабжен встроенным в него дисплеем вывода результатов, служащим для отображения зарегистрированных и математически обработанных данных; также корпус снабжен слотом типа SD, содержащим носитель электронной информации, позволяющим производить запись результатов измерений; также корпус снабжен блоком электропитания, состоящим из автономного источника питания и преобразователя внешнего питания, при этом блок электропитания подключен к прецизионному датчику угла наклона, аналого-цифровому преобразователю и вычислительному блоку, соединенному параллельно с дисплеем вывода результатов и слотом типа SD; корпус установлен на гладкое стальное основание, обеспечивающее устойчивое положение при креновании.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ СУДНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240254C1 |
| Система определения метацентрической высоты судна | 1986 |
|
SU1560449A1 |
| US 4872118 A, 03.10.1989 | |||
| ИЗМЕРИТЕЛЬ ФАКТИЧЕСКОЙ ОСТОЙЧИВОСТИ СУДНА | 1992 |
|
RU2057680C1 |
| Способ получения арсената кальция | 1948 |
|
SU76629A1 |
| СТАТОДИНАМИЧЕСКИЙ КРЕНОМЕТР | 1992 |
|
RU2057679C1 |
| WO 8703855 A1, 02.07.1987. | |||

