При обогащении руд методом флотации существенное значение для технологического нроцесса имеет правильная дозировка флотационных реагентов.
Известные устройства для регулирования дозировки реагентов в скиповом питателе путем изменения высоты поднятия стаканчика требуют предварительной остановки питателя.
Предлагаемое устройство устраняет указанный недостаток и позволяет осуществлять регулирование дозировки реагентов без прекращения процесса обогащения.
Для этой цели устройство выполнено в виде планетарной системы, состоящей из двух сочлененных зубчатых колес, из которых ведущее помещено на валу редуктора с неподвижным центром оси вращения, а ведомое - жестко связано с осью кривощипа и перемещается по дуге окружности с помощью рычажной системы, приводимой в движение вручную или автоматически.
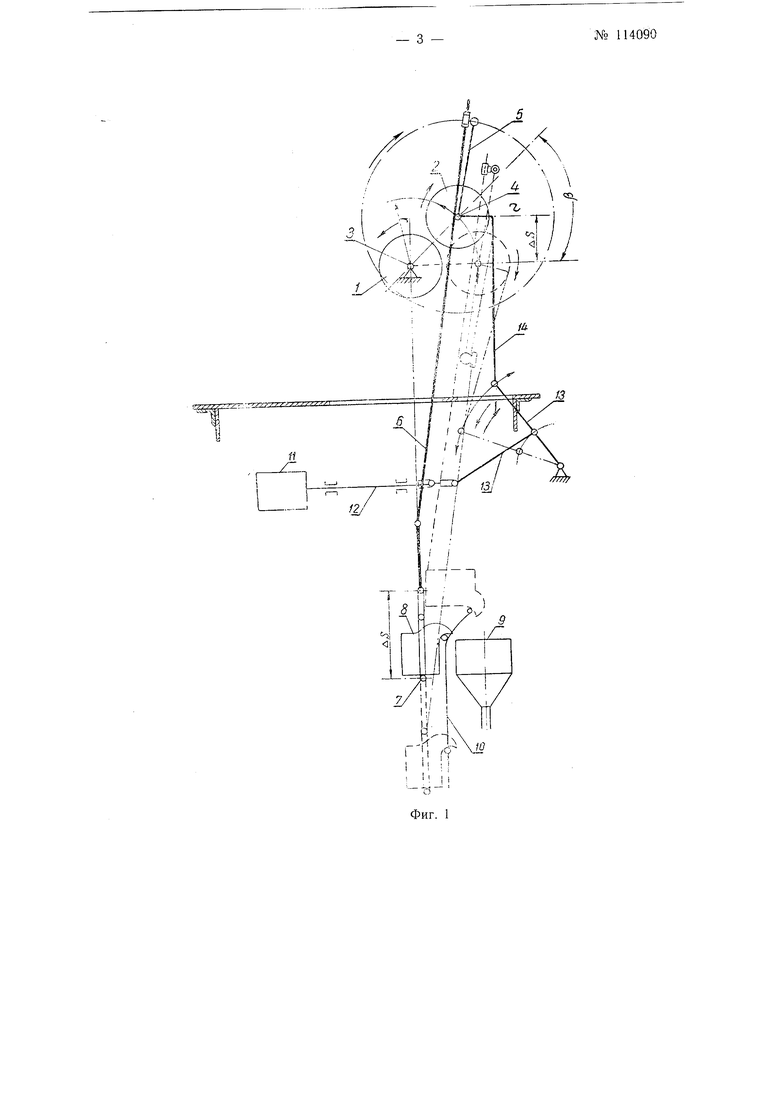
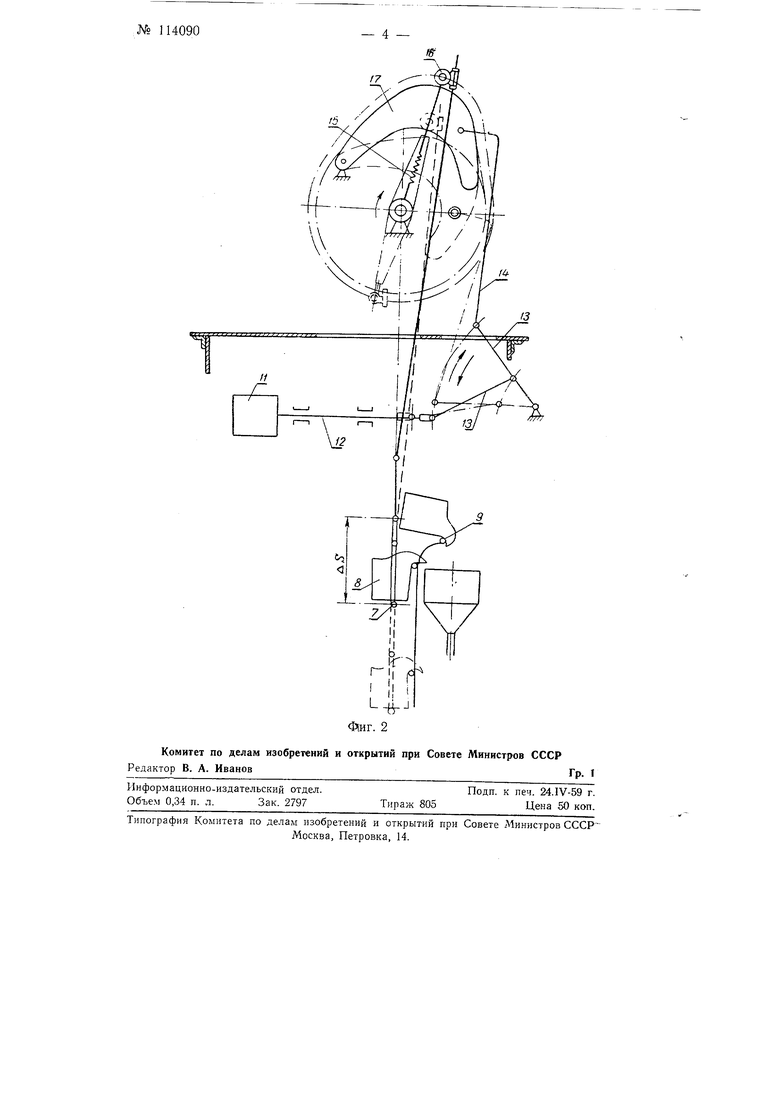
На фиг. 1 и 2 изображена кинематическая схема предлагаемого устройства в двух вариантах исполнения.
Устройство выполнено в виде рычажной системы (фиг. 1), соединенной с зубчатой планетарной передачей, состоящей из щестерен 1 w. 2. Шестерня I находится на валу редуктора, т. е. вращается относительно неподвижной оси 3, а щестерня 2 установлена на оси 4 кривощип а 5.
При перемещении оси 4 кривощипа относительно неподвижной оси 3 (фиг. 1) изменяется высота подъема тяги 6, а следовательно, и опоры 7 стаканчика 8. При этом изменяется степень его наклона в результате перемещения второй оноры 9 стаканчика по криволинейному участку направляющей 10.
Таким образом, перемещение оси вращения кривощипа 5 по дуге окружности радиусом г на угол Р вызывает изменение максимальной высоты подъема стаканчика 8 на величину Д5 от нижнего положения, соответствующего минимальной дозировке реагента (практически - отсутствию выливания реагента) до верхнего положения, соответствующего
л и 4090
максимальной дозировке (практически - полному опрокидыванию стаканчика).
Перемещение оси 4 относительно оси 3 может быть осуществлено различными способами, например с помощью пневматического или электрического исполнительного механизма 11, выходной шток 12 которого воздействз ет на ось 4 посредством рычажной системы 13-14.
По второму варианту (фиг. 2) кривошипно-щатуииый механизм выполнен с перемеиной длиной кривошипа 5 за счет эластичной связи 15 (например, пружинной), позволяющей ролику 16 щарнирного сочленения кривошипа двигаться по поверхности копира П.
Верхнее положение копира 17 соответствует максимальной дозировке, нижнее - минимальной.
Профиль копира рассчитывается таким образом, что изменение дозировки реагента является линейной функцией, перемещения штока 12.
Кинематика перемещения копира может быть аналогичной кинематике пepeмeи eния оси 4 шестерни 2 в устройстве по фиг. 1.
Предмет изобретения
I. Устройство для регулирования дозировки реагентов в скиповом питателе путем изменения высоты поднятия стаканчика, отличающееся тем, что, с целью осуществления автоматического или ручного регзлирования дозировки реагента без остановки питателя, оно выполнено в виде планетарной системы, состоящей из двух сочлененных зубчатых колес, из которых ведущее помещено на валу редуктора - с неподвижным центром оси вращения, а ведомое, жестко связанное с осью кривошипа, перемещается по дуге окружности с помощью рычажной системы, приводимой в движение вручную или автоматически.
2. Устройство по п. 1, отличающееся тем, что кривошипно-шатунный механизм выполнен с переменной длиной кривошипа за счет эластичной связи, позволяющей ролику шарнирного сочленения кривошипа двигаться по поверхности копира.