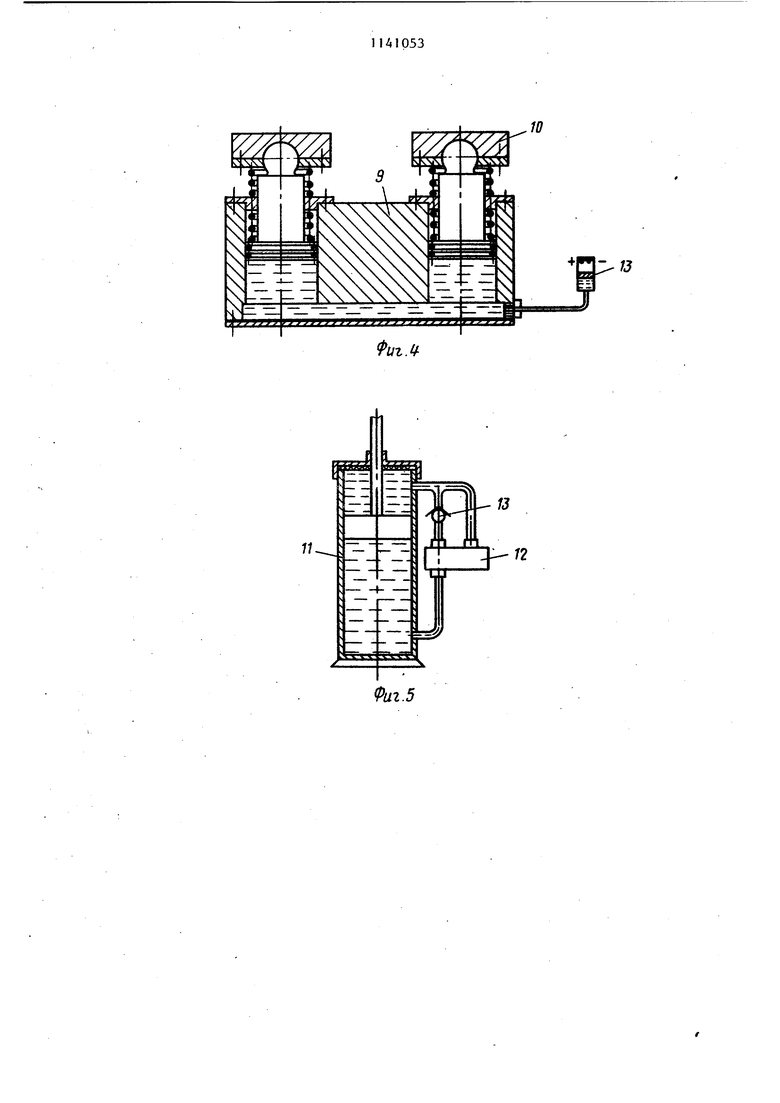
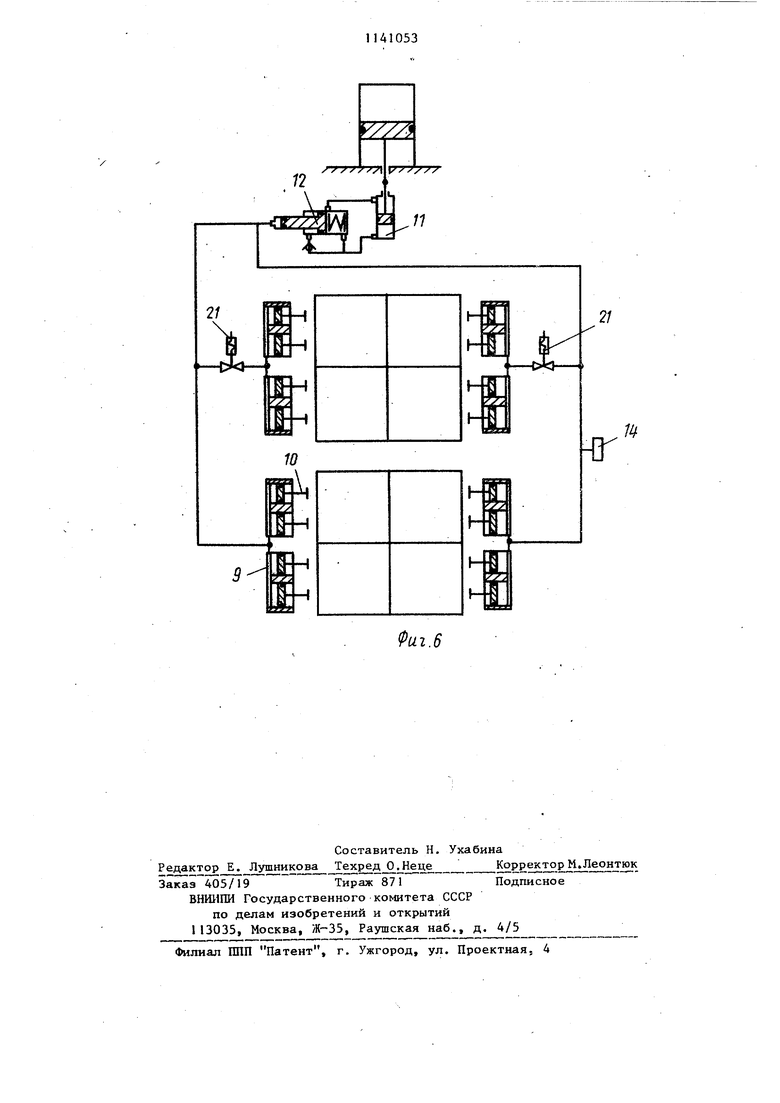
Изобретение относится к винодель ческой, пиво-безалкогольной и ликерО водочной отраслям пищевой промыш ленности, предназначено для формирования и разборки пакетов на плоском поддоне из ящиков и может быть использовано в других отраслях народного хозяйства, где применяется пакетный, на плоских поддонах, способ формирования (расформирования) укрупненной грузовой единицы из шту ных предметов прямоугольной формы. Известно устройство для формирования и разборки пакетов, преимущественно ящиков, содержащее подающий механизм, установленную в . вертикальных направляющих с возможностью перемещения по ним от привода П-образную раму, механизм захвата, включающий в себя шарнирно укрепленные на раме поворотные рычаги и связанные с ними подхватные элементы, и отводяпщй конвейер 1. Недостатком известного устройства является то, что оно может обеспечить формирование пакета лишь из штучных предметов, имеющих строгие геометрические размеры и обладающих прочностью, позволяющей, выде живать-, не разрушаясь, усилие механизма захвата, определенное конструктивным исполнением последнего. Цель изобретения - повьшение надежности в работе. Поставленная цель достигается тем, что в устройстве для формирова ния и разборки пакетов, преимущественно япщков, содержащем подающий механизм, установленную в вертикаль ных направляющих с возможностыо перемещения по ним от привода П-образ ную раму, механизм захвата, имеющий шарнирно укрепленные на раме поворотные рычаги и связанные с ним подхватные элементы, и отводящий ко вейер, механизм захвата.снабжен блокирующим приспособлением, представляющим собой установленный на П-образной, раме гидрозамок с золотниковым распределителем, соединенны с приводом перемещения рамы, шарнир но закрепленным под углом к горизонтальной плоскости на поворотных рычагах гидроцилиндрами, поршневые полости которых сообщены между собо и через золотниковый распределитель с гидрозамком и датчиком давления в гидроцилиндрах, при этом поворотн рычаги выполнены двуплечими, соединены посредством шарнирно закрепленных штанг с приводом перемещения П-образной рамы, подхватные элементы представляют собой прижимные пластины, закрепленные на штоках упомянутых гидроцилиндров, а датчик давления связан с цепью управления золотникового распределителя гидрозамка. На фиг. 1 изображено устройство общий вид; на фиг. 2 - то же, вид сбоку; на ф.иг. 3 - то ке, вид сверху; на фиг. 4 - разрез блока гидроцилиндров с датчиком давления; на фиг. 5 - гидрозамок с золотпико вым распределителем; на фиг. 6 - гидросхема устройства. Устройство для формирования и разборки пакетов содержит станину с вертикальными направляющими 2, в которых посредством ползунов 3 установлена с возможностью переме- щения по ним от привода силового цилиндра 4 П-образная рама 5. Механизм захвата включает в себя поворотные вокруг шарнира 6 двуплечие рычаги 7, шарнирно эакреплен1гые на П-образной раме 5. Одно плечо рычагов 7 посредством шарнирно закрепленных штанг 8 связано со штоком силового цилиндра 4,а на свободном плече под углом к горизонтали шарнирно установлены блоки сообщающихся между собой, гидроцилинд- ров 9. На штоках гидроцилиндров 9 закреплены подхватные элементы, представляюш е собой прижимные пластины 10. Устройство имеет блокирующее приспособление, представляющее собой установленный на П-образной раме гидрозамок. 1 1 с золотниковым распределителем 12 и обратным клапаном 13. Гидрозамок соединен с приводом перемещения П-образной рамы 5. Полости блоков гидроцилиндров 9 через золотниковый распределитель 12 соединены с гидрозамком II и имеют датчик 14 давления. Устройство содержит также магазин 15 поддонов, конвейеры 16-18 для подачи предметов, толкатель 19 для. формирования слоя и отводящий конвейер 20. В систему управления устройством включены электроклапаны 21. Устройство работает следующим образом. 3 предметы по конвейеру 16 поступают на конвейер 17, где с помощью толкателя 19 формируется слой, например 2x2 или 3x2 и т.п. Сформированный слой поступает в зоне дейст вия механизма захвата на конвейер 18, после чего силовой цилиндр 4 начинает поднимать шток и связанные с ним штанги 8, которые будут стремиться занять горизонтальное положение, вследствие чего поворотные рыча ги 7 будут разворачиваться относительно П-образной рамы 5 дотах пор, пока прижимные пластины 10 гидроцилиндров 9, все до одного, не найдут себе опору (геометрические отклонения , предметов на усилие захва,та не влияют, так как полости гидроцилиндров сообщаются и за счет перемещения поршней цилиндров происходит выравнивание усилий, прилагаемых к предметам). Датчик 14 давления подает сигнал о создании необходимого усилия на золотниковый распределитель 12 гидрозамка 11, переключая его на работу через обратный клапан 13, что блокирует поворотные рычаги от разжима, т.е. поршень гидрозамка может двигаться вверх вслед за штоком силового цилиндра 4 Расположение блоков гидроцилинд- ров 9 под углом к горизонтали создает клиновой захват, а также забло кированные от разжима поворотные рычаги 7 обеспечивают надежный захват предметов, исключая их сдвиг относительно друг друга и падение. Механизм захвата поднимает слой предметов, на место которого поступает новый. Силовой цилиндр 4, выдви гая шток, производит опускание захваченного слоя на вновь поступивший При установке верхнего слоя на нижний блоки гидроцилиндров 9 поворачиваются вверх, давление в гидросистеме резко падает, о чем сигнализирует датчик 54 давления, переключая золотниковый распределитель 12, тогда поршень 24 гидрозамка 1I получает возможность перемещаться вниз, а поворотные рычаги 7, опускаясь, разворачиваются от слоев предметов. 534 Механизм захвата опускается до своего первоначального положения. Происходит очередной подъем и захват уже двух слоев и т.д. Сборка пакета заканчивается установкой слоев предметов на поддон, который поступает на конвейер I8 из магазина 15 поддонов. Готовый пакет выводится конвейером 20. В случае, когда общая масса пакета требует создания усилия для подъема-опускания предметов (предмета ) больше, чем это позволяет прочность формируемых предметов, рационально размещать блоки цилиндров рядами друг над другом - 2, 3 и т.д., что позволяет рассредоточить усилие по пакету. В этом случае в систему вводятся электроклапаны 21, которые включают в работу вьш1ерасположенные ряды блоков гидроцилиндров. Предлагаемое устройство может работать и в режиме пакеторазборщика, только все операции будут происходить в обратном порядке, а П-образная рама с механизмом захвата будет перемещаться до уровня, обеспечивающего захват второго снизу слоя. В предлагаемом устройстве для формирования и разборки пакетов механизм захвата обладает возможностью настраиваться на слой предметов, имеющих геометрические отклонения, создавая при этом минимальное усилие, необходимое для подъема-опускания слоя (слоев } и позволяя также рассредоточить это усилие равномерно по всему слою (Слоям), не разрушая предметов. Необходимо отметить низ кую металлоемкость конструкщш, малую занимаемую площадь, что важно для небольших предприятий; возможность использования устройства на линиях, где нет необходимости в формирующем, отдельно вынесенном рольганге, а также в магазине поддонов, так как поддон может подаваться с конвейера 20 за счет реверса конвейеров 18 и 20.
Фиг.1
I Загрузка I ящиков
Загрузка
стопки noddowB
Bbiffaija пакетов
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ТРАНСПОРТАБЕЛЬНОГО МОДУЛЯ-КОНТЕЙНЕРА | 2002 |
|
RU2211793C1 |
| НАТЯЖНОЕ УСТРОЙСТВО СКРЕБКОВОГО КОНВЕЙЕРА ПОГРУЗОЧНОЙ МАШИНЫ | 1992 |
|
RU2057695C1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОЙ МОЙКИ ИЗДЕЛИЙ | 1992 |
|
RU2008988C1 |
| ГИДРАВЛИЧЕСКАЯ ВЫДВИЖНАЯ ОПОРА ТРАНСПОРТАБЕЛЬНОГО МОДУЛЯ-КОНТЕЙНЕРА | 2002 |
|
RU2205149C1 |
| Ходовое оборудование шагающего экскаватора | 1987 |
|
SU1470878A1 |
| Пакеторазборная машина для штучных грузов | 1989 |
|
SU1708728A2 |
| Устройство для вибровращательного бурения | 1982 |
|
SU1057682A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| Устройство для управления силовыми гидравлическими цилиндрами | 1975 |
|
SU699238A1 |
| Пакеторазборная машина для штучных грузов | 1987 |
|
SU1470634A1 |

УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ И РАЗБОРКИ ПАКЕТОВ, преимущественно ящиков, содержащее подающий механизм, установленную в вертикальных направляющих с возможностью перемещения по ним от привода П-образную pany-j механизм захвата, имеющие шаркирно укрепленные на раме поворотные рычаги и связанные с ними подхватные элементы, и отводящий конвейер, отличающее сятем, что, с целью повьшения его надежности в работе, механизм захвата снабжен блокирукнцйм приспособлением, представляющим собой установленный на П-образной раме гидрозамок с золотниковым распределителем, соединенный с приводом перемещений рамы, шарнирно закрепленными под углом к горизонтальной плоскости на поворотных рычагах гидроцилиндрами, поршневые полости которых сообщены между собой и через золотниковый распределитель - с гидрозамком и датчиком давления в гидроцилинДрах, при этом поворотные рычаги выполнены двуплечими, соединены посредством шарнирно закрепленных штанг с приводом перемещения П-образной рамы, под(Л хватные элементы представляют собой прижимные пластины, закрепленные на штоках упомянутых гидроцилиндров, а датчик давления связан с цепью управления золотникового распределителя гидрозд1мка.
и1.Ъ
13
Фиг.5
21
74
Риг.6
| I | |||
| ШТАБЕЛИРУЮЩАЯ МАЩИНА | 0 |
|
SU288661A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
