СО
:л
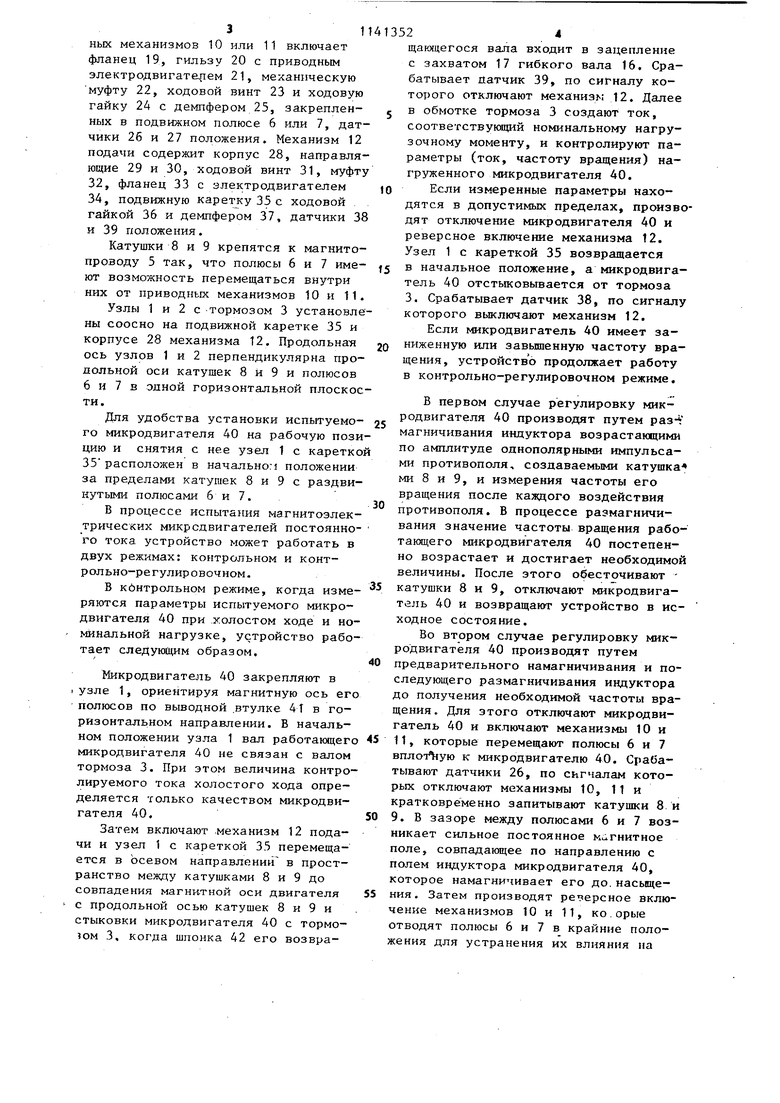
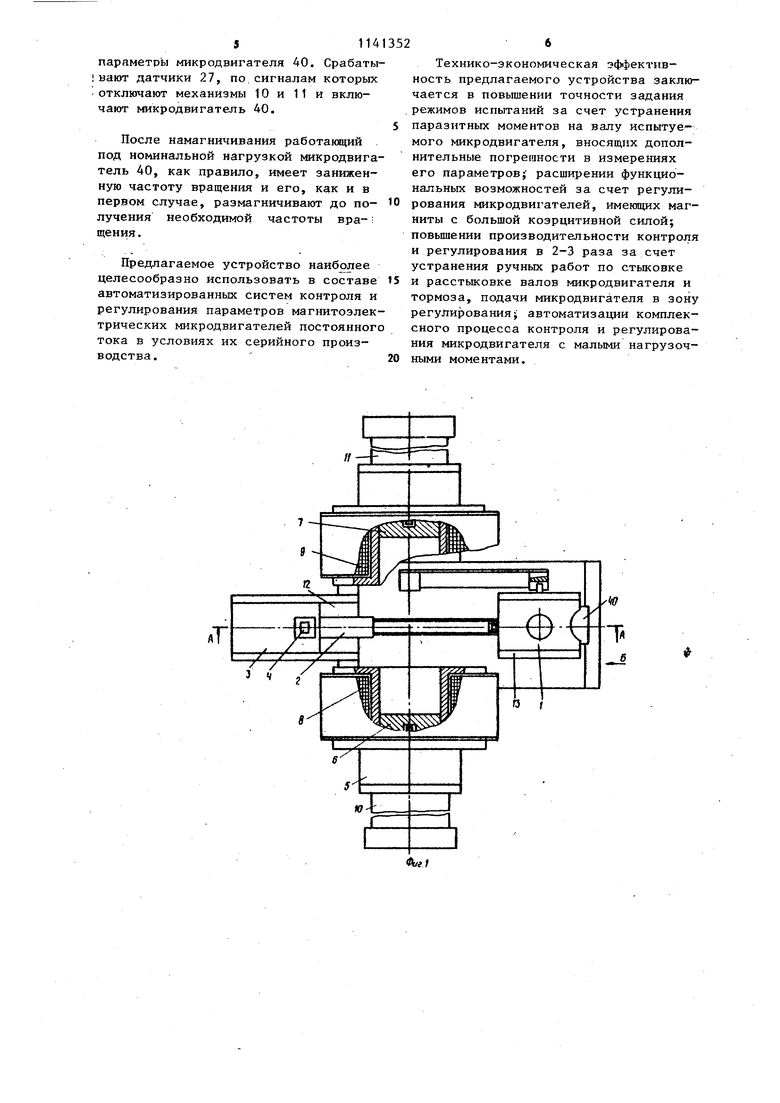
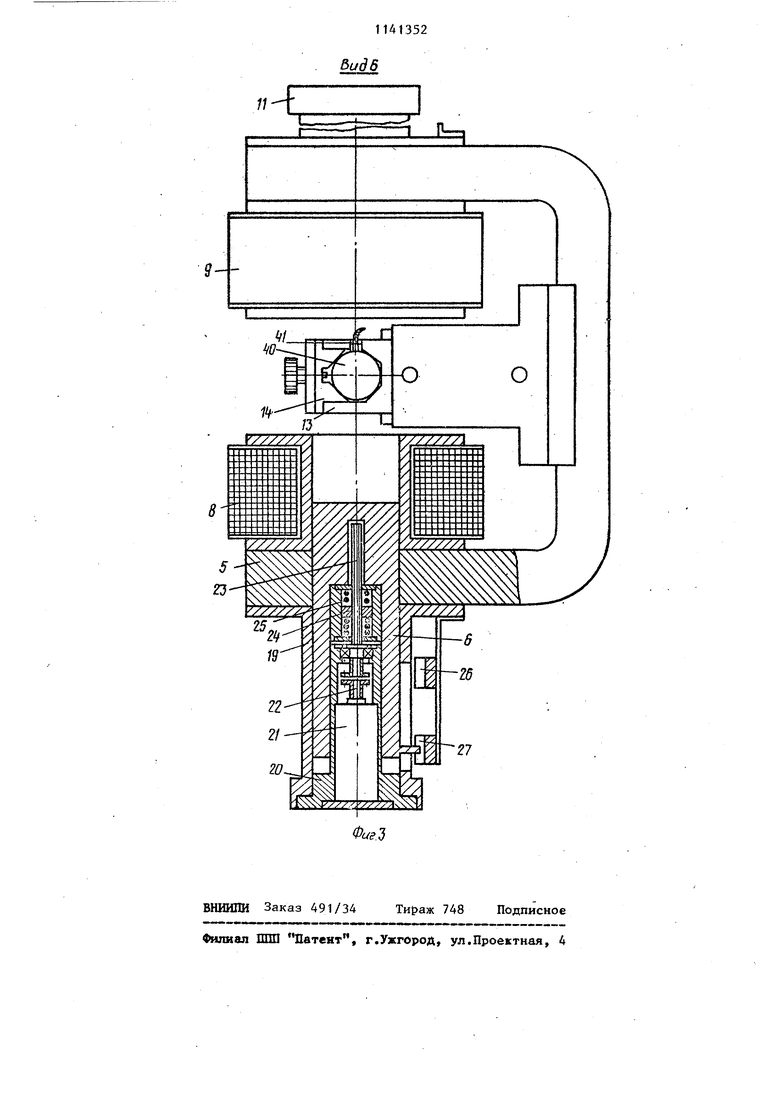
о Изобретение относится к электромашиностроению, а именно к устройствам для испытания электрических машин, и может найти применение в устройствах для контроля и регулирования электродвигателей постоянного тока. Известно устройство для испытания электродвигателя, содержащее нагрузочньй тормоз, муфту с захватом, установленную на валу тормоза, узел крепления электродвигателя 1 . Однако данное устройство при испы таниях позволяет только контролировать параметры электродвигателей и не может их регулировать, например, путем намагнинивания или размагничи вания индукторов магнитоэлектрических микродвигателей. Наиболее близким к изобретению п технической сущности и достигаемому результату является устройство для контроля и регулирования магнитоэлектрических микродвигателей, соде жащее узел крепления испытуемого микродвигателя, нагрузочньш тормоз с датчиком частоты вращения, установленный соосно с испытуемым микро двигателем, две катушки для намагни чивания и размагничивания микродвиг теля, расположенные перпендикулярно его оси вращения, и стыковочный узел для соединения валов двигателя и тормоза 2 . Однако известное устройство имее ораниченные возможности, поскольку не позволяет регулировать микродвигатели, имеющие постоянные магниты с большой коэрцитивной силой, из-за низкой напряженности поля в зазоре между соленоидными катушками, вьшол ненными без магнитопровода. Кроме того, оно имеет большую погрешность при задании режимов испытаний, что снижает точность измерений параметров микродвигателей и ухудшает их динамические характеристики. Причин этого заключается в том, что вращаю щийся в незапитанном тормозе нагрузочньй элемент за счет собственных вентиляционных и электромеханически потерь и массы создает.на валу испы туемого микродвигателя,паразитный нагрузочный момент и дополнительньм момент инерции, Увеличивающие его ток холостого хода и электромеханическую постоянную. Данное устройство имеет также низкую производительность и не позволяет полностью автоматизировать процесс испытаний ввиду необходимости проведения ручных работ по закреплению нагрузочного элемента на валу микродвигателя; и его центровки в магнитной системе тормоза. Целью предлагаемого изобретения является расширение функциональных возможностей, повышение точности и увеличение производительности. Эта цель достигается тем, что в устройство для контроля и регулирования магнитоэлектрических микродвигателей, содержащее узел крепления испытуемого микродвигателя, нагрузочньй тормоз с датчиком частоты вращения, предназначенный для соосной установки с испытуемым микродвигателем, две катушки для намагничивания и размагничивания микродвигателя, расположенные перпендикулярно оси вращения тормоза, и стыковочный узел для соединения валов тормоза и микродвигателя, введены П-образньй Mai- яитопровод с полюсами, установленными с возможностью осевого перемещения внутри катушек и соединеиными с двумя приводными механизмами, закрепленными на магнитопроводе, и механизм подачи, на котором с возможностью осевого взаимного перемещения установлен узел крепления микродвигателя и тормоз, причем стьковочньш узел закреплен на тормозе, а катушки - на магнитопроводе. На фиг.1 представлено устройство, вид сверху; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - вид Б на фиг.1. Устройство содержит узел 1 крепления, Ьтыковочньй узел 2, нагрузочньй тормоз 3 с фотодатчиком 4 частоты вращения, П-образньй магнитопровод 5 с подвижными полюсами 6 и 7, катушки 8 и 9, приводные механизмы 10 и 11, механизм 12 подачи. Узел 1 крепления состоит из основания 13 и зажима 14, стыковочньй узел 2 - из направляющей втулки 15 и гибкого вала 16 с захватом 17, закрепленных соответственно на корпусе и выходном валу тормоза 3. В качестве тормоза 3 использован нагрузочньй узел гиетерезисного типа с дисковым ротором 18, зубцы которого перемещаются в зазоре фотодатчика 4 частоты чращения. Каждьй из приводньк механизмов 10 или 11 включает фланец 19, гильзу 20 с приводным электродвигатвх1ем 21, механическую муфту 22, ходовой винт 23 и ходовую гайку 24 с демпфером 25, закреплен- j ных в подвижном полюсе 6 или 7, датчики 26 и 27 положения. Механизм 12 подачи содержит корпус 28, направляющие 29 и 30, ходовой винт 31, муфту 32, фланец 33 с электродвигателем ю 34, подвижную каретку 35 с ходовой гайкой 36 и демпфером 37, датчики 38 и 39 положения.
Катушки 8 и 9 крепятся к магнитопроводу 5 так, что полюсы 6 и 7 име- j ют возможность перемещаться внутри них от приводных механизмов 10 и 11.
Узлы 1 и 2 с тормозом 3 установлены соосно на подвижной каретке 35 и корпусе 28 механизма 12. Продольна-я 20 ось узлов 1 и 2 перпендикулярна продольной оси катушек 8 и 9 и полюсов 6 и 7 в одной горизонтальной плоскости.
Для удобства установки испытуемо- 25 го микродвигателя 40 на рабочую позицию и снятия с нее узел 1 с кареткой 35 расположен в начальном положении за пределами катушек 8 и 9 с раздвинутыми полюсами 6 и 7.,
В процессе испытания магнитоэлектрических микродвигателей постоянного тока устройство может работать в двух режимах: контрольном и контрольно-регулировочном.
В кбнтрольном режиме, когда измеряются параметры испытуемого микродвигателя 40 при холостом ходе и номинальной нагрузке, устройство работает следующим образом.
Микродвигатель 40 закрепляют в узле 1, ориентируя магнитную ось его полюсов по выводной .втулке 4 Т в горизонталь,ном направлении. В начальном положении узла 1 вал работающего 45 микродвигателя 40 не связан с валом тормоза 3. При этом величина контролируемого тока холостого хода определяется только качеством микродвигателя 40.50
Затем включают механизм 12 подачи и узел 1 с кареткой 35 перемещается в осевом направлении в пространство между катушками 8 и 9 до совпадения магнитной оси двигателя 55 с продольной осью катушек 8 и 9 и стыковки микродвигателя 40 с тормозом 3, когда шпонка 42 его возвращающегося вала входит в зацепление с захватом 17 гибкого вала 16. Срабатывает датчик 39, по сигналу которого отключают механизм 12. Далее в обмотке тормоза 3 создают ток, соответствующий номина-пьному нагрузочному моменту, и контролируют параметры (ток, частоту вращения) нагруженного микродвигателя 40.
Если измеренные параметры находятся в допустимых пределах, производят отключение микродвигателя 40 и реверсное включение механизма 12. Узел 1 с кареткой 35 возвращается в начальное положение, а микродвигатель 40 отстыковывается от тормоза 3. Срабатывает датчик 38, по сигналу которого выключают механизм 12.
Если микродвигатель 40 имеет заниженную или завьшенную частоту вращения, устройство продолжает работу в контрольно-регулировочном режиме,
В первом случае регулировку cикродвигателя 40 производят путем раз- магничивания индуктора возрастающими по амплитуде однополярными импульсами противополя, создаваемыми катушка ми 8 и 9, и измерения частоты его вращения после каждого воздействия противополя, В процессе размагничивания значение частоты вращения работакяцего микродвигателя 40 постепенно возрастает и достигает необходимо величины. После этого обесточивают катушки 8 и 9, отключают микродвигатель 40 и возвращают устройство в исходное состояние.
Во втором случае регулировку микродвигателя 40 производят путем предварительного намагничивания и последующего размагничивания индуктора до получения необходимой частоты вращения. Для этого отключают микродвигатель 40 и включают механизмы 10 и 11, которые перемещают полюсы 6 и 7 вплоЛую к микродвигателю 40. Срабатывают датчики 26, по сигналам которых отключают механизмы 10, 11 и кратковременно запитывают катушки 8 и 9. В зазоре между полюсами 6 и 7 возникает сильное постоянное магнитное поле, совпадающее по направлению с полем индуктора микродвигателя 40, которое намагничивает его до. насыщения. Затем производят реверсное включение механизмов 10 и 11, ко.орые отводят полюсы 6 и 7 в крайние положения для устранения их влияния на S114 параметры микродвигателя 40. СрабатыIвают датчики 27, по. сигналам которых отключают механизмы 10 и 11 и включают микродвигатель 40. После намагничивания работакнций под номинальной нагрузкой микродвигатель 40, как правило, имеет заниженную частоту вращения и его, как и в первом случае, размагничивают до получения необходимой частоты вра-: щения. Предлагаемое устройство наиболее целесообразно использовать в составе автоматизированных систем контроля и регулирования параметров магнитоэлектрических микродвигателей постоянного тока в условиях их серийного производства. Технико-экономическая эф1|)ектив- ность предлагаемого устройства заключается в повышении точности задания режимов испытаний за счет устранения паразитных моментов на валу испытуемого микродвигателя, вносящих дополнительные погрешности в измерениях его параметров; расширении функциональных возможностей за счет регулирования микродвигателей, имеющих магниты с большой коэрцитивной силой; повьш1ении производительности контроля и регулирования в 2-3 раза за счет устранения ручных работ по стыковке и расстыковке валов микродвигателя и тормоза, подачи микродвигателя в зону регулирования автоматизации комплексного процесса контроля и регулирования микродвигателя с малыми нагрузочными моментами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| ЯВНОПОЛЮСНАЯ КОЛЛЕКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414797C1 |
| КОЛЛЕКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЯКОРЕМ | 2009 |
|
RU2390088C1 |
| ПРИСТАВНОЙ ЭЛЕКТРОМАГНИТ К КОЭРЦИТИМЕТРУ | 2013 |
|
RU2535632C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| СИНХРОННЫЙ МИКРОДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНЫМ УНИПОЛЯРНЫМ ВОЗБУЖДЕНИЕМ | 2012 |
|
RU2516286C2 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ МАГНИТОЭЛЕКТРИЧЕСКИХ МИКРОДВИГАТЕЛЕЙ, содержащее узел для крепления испытуемого микродвигате ля, нагрузочный тормоз с датчиком частоты вращения, предназначенньй для соосной установки с испытуемым микродвигателем, две катушки для намагничивания и размагничивания микродвигателя, расположенные перпендикулярно оси вращения тормоза, и стыковочный узел для соединения валов двигателя и тормоза, отлича (ощееся тем, что, с целью расширения функциональных возможностей, повышения точности и увеличения производительности, в него введены П-образньй магнитопровод с полюсами, установленными с возможностью осевого перемещения внутри катушек и соединенными с двумя приводными механизмами, закрепленными на магнитопроводе, и механизм подачи, на котором с возможностью осевого взаимного перемещения установлены узел крепления микродвигателя и тормоз, причем стыковочный узел закреплён на тормозе, а катушки на магнитопроводе.
Ф
W
Iff
w
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для соединения двигатся с тормозом при испытаниях | 1975 |
|
SU611275A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Микроэлектродвигатели для систем автоматики | |||
| Технический справочник | |||
| Под ред | |||
| Э.А.Лодочникова и Юферова Ф.М., М., Энергия, 1969, с | |||
| Льночесальная машина | 1923 |
|
SU245A1 |
