Изобретение относиться к гироскопии и может быть использовано в точных системах инерциального управления объектами бескарданного типа.
Известен датчик угловой скорости на базе модуляционного гироскопа (патент RU 2276773 С2, G01C 19/02), содержащий ротор в виде параллелепипеда на упругом равножестком подвесе, помещенный в герметизированную, вакуумированную вращающуюся вместе с ротором камеру, газодинамические сферические опоры, двигатель, вынесенные из вакуумированного объема, устройство съема информации и управления ротором во вращающейся системе координат, выполненное в виде емкостно-частотного преобразователя и синусно-косинусного преобразователя, а также магнитоэлектрический датчика момента, состоящий из катушек и двух постоянных магнитов с радиальной текстурой намагничивания, установленных диаметрально противоположно в роторе гироскопа, причем магниты и соответствующие им магнитопроводы помещены на роторе, а обмотки датчика момента расположены за стенкой герметичной камеры и пронизываются радиальным полем постоянных магнитов.
Основным недостатком прототипа являются большие погрешности, возникающие в синусно-косинусном преобразователе. По принципу действия этот преобразователь представляет собой обращенный однофазный генератор переменного тока с двумя распределенными обмотками возбуждения на статоре, оси симметрии которых сдвинуты относительно друг друга в магнитном пространстве на 90°. Погрешности полезного сигнала в выходной обмотке ротора возникают из-за остаточного намагничивания магнитного материала статора после прохождения максимальных входных сигналов в переходных процессах. Безошибочная работа преобразователя возможна только при полном и непрерывном размагничивании материалов как статора, так и ротора.
Варианты размагничивания с помощью третьей симметричной обмотки статора через обратную связь или через подачу входного сигнала с удвоенной частотой на статор преобразователя обеспечивают условие непрерывности, но не дают полного размагничивания.
Размагничивание с помощью затухающего вращающегося магнитного поля обеспечивает полное размагничивание, но не соответствует условию непрерывности. Применение принципа высокочастотной линеаризации будет вносить свои погрешности, например, связанные с квантованием по частоте и т.п.
Техническим результатом изобретения является повышение точности работы датчика угловой скорости за счет исключения из структурной схемы гироскопа синусно-косинусного преобразователя, который является источником гистерезиса, реализации обратной связи полностью на вращающейся части гироскопа и передачи частотно-модулированного сигнала с помощью преобразователя напряжения в частоту на корпус.
Указанный технический результат достигается тем, что в датчике угловой скорости на вращающемся вместе с ротором валу устанавливают усилитель канала обратной связи. На вход усилителя подается сигнал с одной из катушек магнитоэлектрического датчика момента, которая используется как индукционный датчик угла. Выход усилителя подключается к входу другой катушки магнитоэлектрического датчика момента. Выход этой катушки подключается к входу эталонного резистора и к входу преобразователя напряжения в частоту. Выход эталонного резистора подключается к общему проводу, а сигнал с выхода преобразователя напряжения в частоту передают с помощью токосъема на неподвижную часть гироскопа.
С выхода токосъема сигнал подается на частотный детектор (ЧД) и два фазовых демодулятора (ФД), выполненные в цифровом виде. С помощью ЧД и двух ФД сигнал раскладывается на две составляющие угловой скорости. Питание усилителя, стоящего на валу, осуществляется через аналогичный токосъему токоподвод.
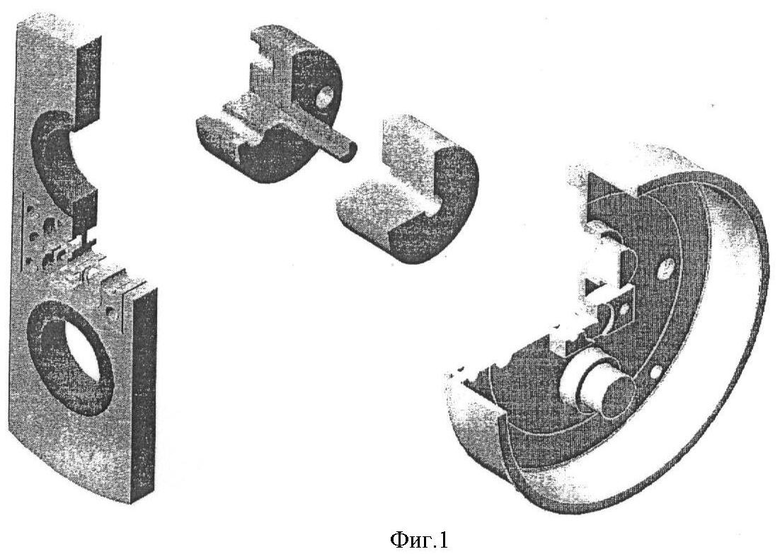
В таком гироскопе, где усилитель канала обратной связи вместе с преобразователем напряжения в частоту расположен на вращающемся вместе с ротором валу, устройством съема информации с ротора является один из двух датчиков момента (ДМ). Один ДМ работает как датчик угла (на одной стороне ротора), а другой как датчик момента (на другой стороне ротора) (см. фиг.1). В этом новизна данного гироскопа. Исключение емкостного датчика угла, требующего гермовыводов и кварцевых плат с металлизацией (вакуум ≈10-5 мм рт. столба) и емкостно-частотного преобразователя, стоящего на валу гироскопа, существенно упрощает прибор. При этом сохраняется его главное преимущество - съем сигнала с ротора осуществляется во вращающейся системе координат. Таким образом, прибор имеет трехкратную модуляцию.
- Первая модуляция - собственное вращение ротора с резонансной угловой скоростью.
- Вторая модуляция - вращения датчика угла и датчика момента относительно корпуса, что увеличивает соотношение «сигнал - помеха» и, в итоге, точность гироскопа.
Американцы, например, делают принудительное вращение корпуса прибора, чтобы избавиться от помех, связанных с корпусом. Для нашего гироскопа не надо создавать дополнительное устройство, которое вращает корпус. В нем съем сигнала происходит во вращающейся системе координат, то есть осуществляется модуляция датчика угла.
- Третья модуляция - сам ротор как носитель кинетического момента, сделанный в виде параллелепипеда, имеющего неравные экваториальные моменты инерции (просто пластина на упругих элементах), колеблется относительно вращающегося датчика угла при воздействии внешней угловой скорости.
Индукционный датчик угла в нашей конструкции принципиально отличается от того, который используется в обычном динамически настраиваемом гироскопе (ДНГ). В нем обмотки (см. фиг.1) датчика расположены за стенкой герметичной камеры, а ротор с магнитами находится внутри герметичной камеры. В этом заключается новизна конструкции датчика угла (датчик момента такой же конструкции расположен на другой стороне ротора). Усилитель канала обратной связи и эталонный резистор такие же, что и в ДНГ, когда он работает в режиме ДУСа (датчика угловой скорости). Однако в нашем гироскопе усилитель, эталонный резистор и преобразователь напряжения в частоту стоят на валу и вращаются вместе с ротором гироскопа относительно корпуса.
Что касается преобразователя напряжения в частоту, то в ДНГ он просто переводит постоянный или медленно меняющийся сигнал в частоту и в цифру. Замена синусно-косинусного преобразователя на преобразователь напряжения в частоту в принципе исключает гистерезис модуляционного ДУСа, а также позволяет снять информацию о входной угловой скорости с вращающейся части на корпус прибора.
Таким образом, заявляемое изобретение основано не просто на замене одной части известного устройства другой, а является самостоятельным новым изобретением датчика угловой скорости с трехкратной модуляцией полезного сигнала.
На фиг.2 представлена схема канала обратной связи на вращающейся части гироскопа с трехкратной модуляцией полезного сигнала с индукционным измерителем модуляции.
Рассмотрим принцип работы схемы. Ротор 1 гироскопа колеблется с частотой вращения вала гироскопа во вращающейся системе координат, когда на гироскоп действует входная угловая скорость. Индукционный измеритель модуляции, индукционный датчик угла 2, представляющий собой одну из катушек магнитоэлектрического датчика момента, вырабатывает сигнал по скорости колебаний ротора, содержащего постоянный магнит и наводящего в катушке, находящейся за стенкой герметичной камеры, переменное напряжение. Это переменное напряжение поступает на вход усилителя канала обратной связи 3, имеющей большое входное сопротивление. Выходное напряжение усилителя подается на исполнительный элемент, датчик момента 4, представляющий собой вторую катушку магнитоэлектрического датчика момента. Выход катушки магнитоэлектрического датчика момента 4 подключают к входу эталонного резистора 5 и к входу преобразователя напряжения в частоту 6. Датчик момента воздействует на ротор и подавляет его колебания. Ток протекает по обмотке датчика момента и по эталонному резистору. С эталонного резистора напряжение подается на преобразователь напряжения в частоту 6. Далее частотно-модуляционный сигнал через токосъем поступает на корпус прибора. Питание усилителя осуществляется через другой токосъем, находящийся в приборе. На корпусе частично-модуляционный сигнал с помощью частотного детектора 7 и двух фазовых демодуляторов 8 и 9 раскладывается на две составляющие ωх и ωу. Опорным напряжением фазовых демодуляторов является опорное направление ГОИх и ГОИу, вырабатываемое двумя генераторами опорного напряжения, находящимися в приборе.
Замена емкостного датчика угла положения ротора, имеющего емкостно-частотный преобразователь, на индукционный датчик угла, вырабатывающий сигнал по скорости колебаний ротора, позволяет получить на вращающейся части гироскопа сигнал резонансной частоты, пропорциональный амплитуде колебаний ротора, который при этом синхронизируется с нужной фазой датчика момента. Эффективность такого вращающегося канала обратной связи будет определяться коэффициентом передачи усилителя (Кус=1200).
Испытания такого датчика угловой скорости с трехкратной модуляцией полезного сигнала показали, что вследствие модуляционного принципа работы в нем принципиально отсутствует тренд и гистерезис. Таким образом, изменение тока, протекающего в датчике момента, пропорционально девиации частоты с выхода преобразователя напряжения в частоту. Сама же несущая частота (порядка 100 КГц) содержит информацию о температуре за стенкой вращающейся камеры, так как преобразователь и усилитель канала обратной связи составляют единое целое, что позволяет не ставить дополнительный токосъем в приборе, чтобы измерить температуру на его вращающейся части.
Конструктивная асимметрия индукционного датчика угла и датчика момента не влияет на сигнал датчика угла и развиваемый момент, воздействующий на ротор, так как торсионы ротора имеют крестообразную форму и соотношение крутильной и изгибных жесткостей этих торсионов на несколько порядков отличается от торсионов прямоугольного профиля.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| МОДУЛЯЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2303766C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА | 2012 |
|
RU2499984C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2018 |
|
RU2687169C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| КАНАЛ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2548053C1 |
| КУРСОВАЯ СИСТЕМА | 2008 |
|
RU2381452C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
Изобретение относится к гироскопии и может быть использовано в системах инерциального управления объектами бескарданного типа. Датчик содержит ротор в виде параллелепипеда, помещенный в вакуумированную и вращающуюся вместе с ротором камеру, газодинамические сферические опоры, двигатель, устройство подачи питания и съема информации с ротора, магнитоэлектрический датчик момента, состоящий из двух катушек и постоянных магнитов, причем магниты помещены на роторе, а катушки за стенкой герметичной камеры. На валу гироскопа установлен усилитель канала обратной связи, включающей эталонный резистор и преобразователь напряжения в частоту. На вход усилителя подается сигнал с одной из катушек магнитоэлектрического датчика момента, выход усилителя подключается к входу другой катушки, выход которой подключается к входу эталонного резистора и к входу преобразователя напряжения в частоту, сигнал с которого передается с помощью токосъема на неподвижную часть гироскопа. Выход эталонного резистора подключается к общему проводу. Повышение точности достигается за счет исключения синусно-косинусного преобразователя, вызывающего гистерезис, установки на вращающуюся часть усилителя канала обратной связи, эталонного резистора и преобразователя напряжения в частоту. 2 ил.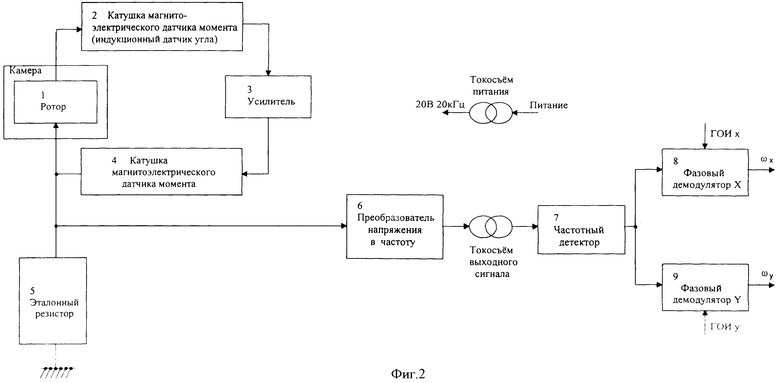
Датчик угловой скорости с трехкратной модуляцией полезного сигнала на базе модуляционного гироскопа с индукционным измерителем модуляции, содержащий ротор в виде параллелепипеда на упругом равножестком подвесе, помещенный в герметизированную, вакуумированную, вращающуюся вместе с ротором камеру; газодинамические сферические опоры и двигатель, вынесенные из вакуумированного объема; магнитоэлектрический датчик момента, состоящий из двух катушек и постоянных магнитов, причем магниты помещены на роторе, а катушки - за стенкой герметичной камеры; устройство подачи питания на подвижную часть гироскопа в виде токосъема питания и устройство съема информации, состоящего из аналогичного токосъема выходного сигнала, частотного детектора и двух фазовых демодуляторов, с помощью которых выходной сигнал раскладывается на две составляющие угловой скорости, отличающийся тем, что на вращающемся валу гироскопа устанавливают усилитель канала обратной связи, на вход усилителя подают сигнал с одной из катушек магнитоэлектрического датчика момента, выход усилителя подключают к входу другой катушки магнитоэлектрического датчика момента, выход ее подключают к входу эталонного резистора и к входу преобразователя напряжения в частоту, выход эталонного резистора подключают к общему проводу, а сигнал с выхода преобразователя передается с помощью токосъема на неподвижную часть гироскопа.
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| МОДУЛЯЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2303766C2 |
| RU 2004113118 A, 27.10.2005 | |||
| БСЕСО/ОЗНДЯ |11дТиГЛШ-.а1;г^\Е.КАЯ | 0 |
|
SU371515A1 |
| US 4357837 A, 09.11.1982. | |||

