2, Система по п. ij отличающ и я с я тем,что блок временной задержки содержит первый ключ, усилитель и последовательно соединенные источник постоянного напряжения, второй ключ, сумматор и апериодическое звено, выходом соединенное с управляющим входом первого ключа, выходом подключенного к выходу временной задержки, первым входом соединенного с управляющим входом второго ключа и с сигнальным входом первого ключа, а вторым входом через усилитель подклю. ченного к второму входу сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования | 1977 |
|
SU924668A1 |
| Многоканальный регулятор | 1982 |
|
SU1100606A1 |
| Устройство для управления температурным режимом индукционной печи | 1986 |
|
SU1368867A2 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Многоточечная релейно-импульсная система для автоматического регулирования параметров технологического процесса | 1979 |
|
SU962840A1 |
| Устройство для программного управления | 1982 |
|
SU1084742A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ПРИ ИНДУКЦИОННОМ НАГРЕВЕ | 1992 |
|
RU2076465C1 |
| Многоточечная релейно-импульсная система для регулирования параметров технологического процесса | 1980 |
|
SU968782A2 |
| Устройство для регулирования соотношения расходов двух смешиваемых потоков | 1982 |
|
SU1062658A1 |

1. СИСТЕ11А РЕГУЖРОВАНИЯ по авт. св. № 924668, отличающаяся тем, что, с целью повышения точности системы, в ней дополнительно установлены датчик расхода, второй блок сравнений и задатчик расхода, выходом подключенный к первому входу второго блока сравнения, втооым входом через датчик расхода подключенного к выходу объекта регулирования, а выходом подключенного к управляющему входу блока временной задержки. фиг.1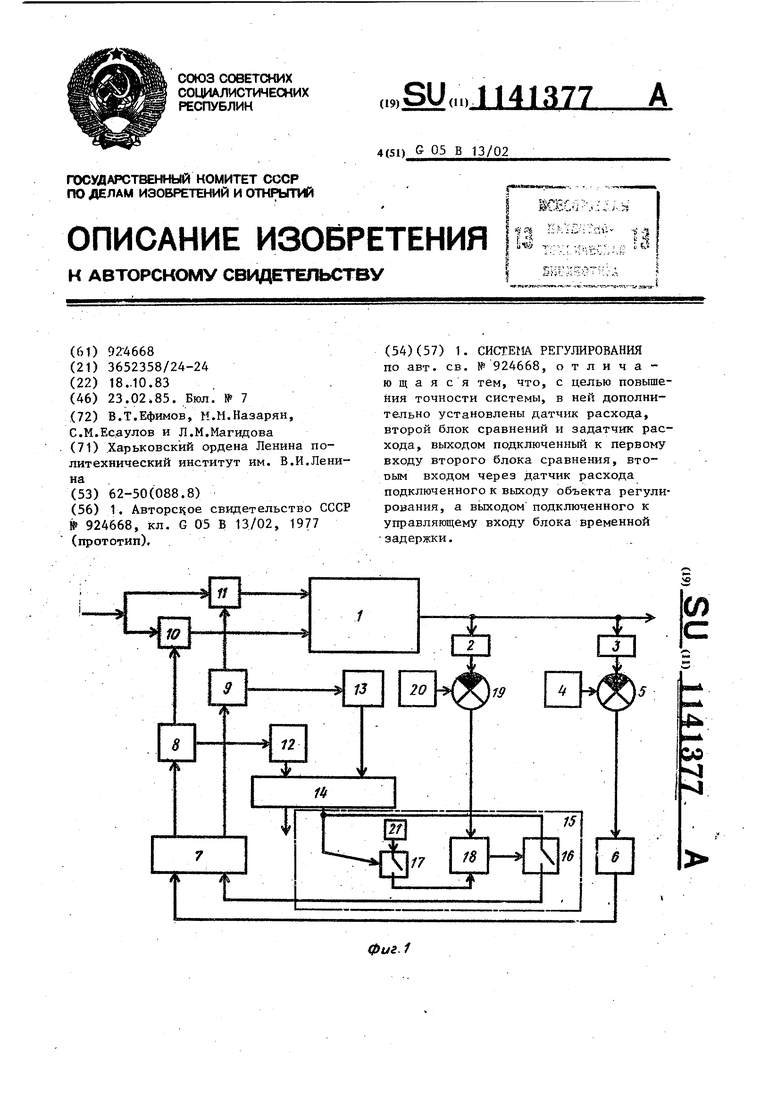
Изобретение относится к системам . автоматического регулирования Ш)1ходного параметра объекта путем изменения расхода твердых, жидких или газообразных материальных потоков при управлении объектами с переменным и транспортньм запаздьюанием и коэффициентом усиления, в частности для регулирования величины рН загрязненных жидкостей при их подкислении или подшэлачивании перед обработкой на очистных установках ,или при зяектрокоагуля11 и, элек трофлотации и т.п. на установках водоочистки, может найти применение в машиностроительной химической, нефтехимической и других атраслях прсмьшшенности.
По основному авт. св. № 924668 известна система, содержащая последовательно соединенные задатчик регулируемого параметра, блок сравнения, регулятор, первьй коммутатор, первый исполнительный механизм, первый регулирукщий орган, датчик положения, второй коммутатор и блок временной задержки, выходом соединенный с управляющим входом первого коммутатора, вторым вьпсодом через последовательно соединенные второй не полните ЛЬНЕП механизм, второй регулирующий орган и датчик положения подключен к второму выходу второго коммутатора, выходы первого и второго регулирукяцйх органов соединены соответственно с первым и вторым входами- объекта регулирбвания, - вход которого через датчик регулирования параметра соединен с вторым входом элемента сравнения 1.
Недостатком известной системы является ее низкая точность при отклонении запаздывания объекта регулирования от расчетной величины.
Целью изобретения является повышение точности системы.
Поставленная цель достигается тем, что в системе дополнительно устаноб- лены датчик расхода, второй блок сравнения и задатчик расхода, выходом ггодключенный к первому входу второго блока сравнения, вторым входом через датчик расхода подключенного к выходу объекта регулирования, а выходом подключенного к управляющему входу блока временной задержки, который содержит первьп ключ, усилитель и последовательно соединенные источник постоянного напряжения, второй ключ, сумматор и апериодическое звено, выходом соединенное с управляющим входом первого ключа, выходом подключенного к вькоду временной задержки, первым входом соединенного с управляющим входом второго ключа и с сигнальнь8 входом первого ключа, а вторым входом через усилитель подключенного к второму входу сумматора.
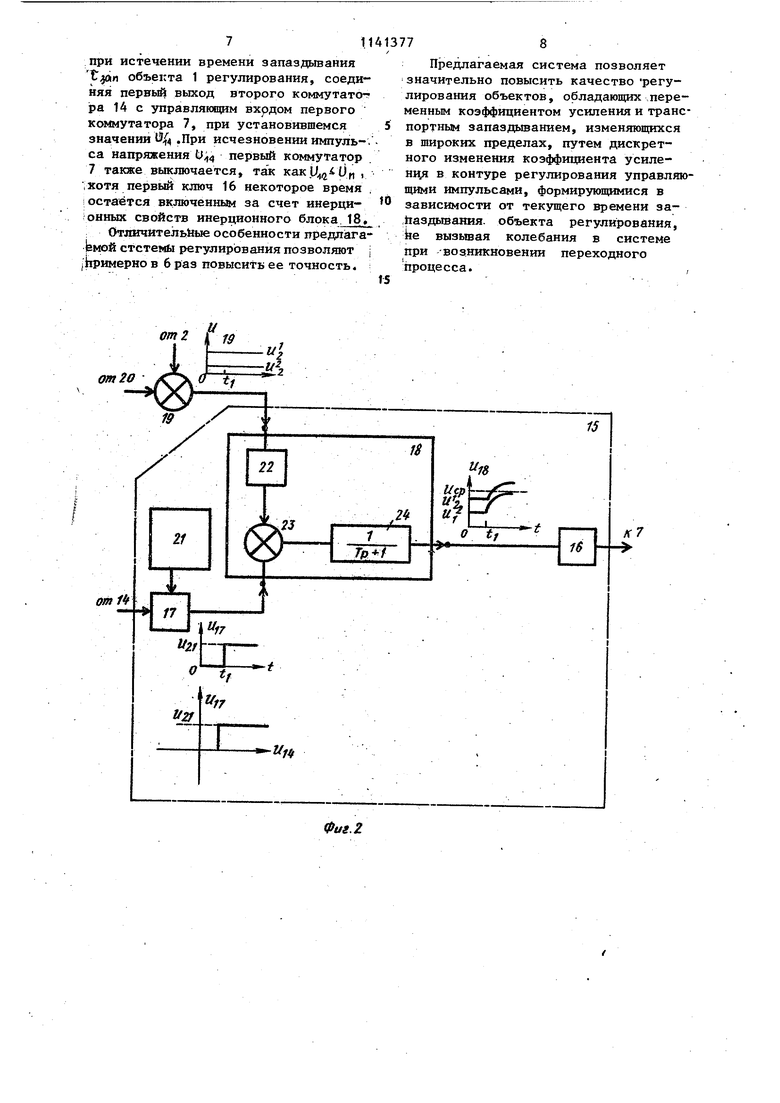
На фиг. 1 приведена структурная схема системы ; на фиг. 2-схема блока временной задержки; на фиг.З-временные диаграммы, иллюстрирующие работу системы,
Система регулирования содержит объект 1 регулирования, да.тчик 2 расхода, датчик 3 регулируемого параметра, задатчик 4 регулируемого параметра, первый блок 5 сравнения, регулятор 6, первьй коммутатор 7, первьй и второй исполнительные механизмы 8 и 9, первый и второй регулируклцие органы 10 и 11, перпьй 12 и второй 13 датчики положения, второй коммутатор 14, блок 15 временной задержки, первый и второй ключи 16 и 17 инерционный блок 18, второй блок 19 сравнения, задатчик 20 расхода, источник 21 постоянного напряжения, усилитель 22, сумматор 23, апериодическое звено 24. На фиг. 3 приняты следующие обозначения: U - выходной сигнал 1 -го функционального блока, lJ(.p - порог срабатывания первого ключа, время запаздывания объекта Iрегулирования. В состав блока временной задержки входят первый и второй ключи 16 и 17, инерционный блок 18 и источник 21 постоянного напряжения. В состав инерционного блока входят усилитель 22, сумматор 23 и апериодическое звено 24. Регулирующий орган 10 регулирует величину малого потока, а регулирующий .орган 11 - большого потока. Положение регулирующих органов 10 и IIконтролируется датчиками 12 и 13 положения соответственно, Втор.ой коммутатор 14 содержит эле мент сравнения и имеет второй выход сигнализации предельного коэффициента регулирующего воздействия на объект. Для получения качественного процесса регулирования при изменения коэЛфициента усиления объекта 1 в контуре регулирования необходимо изменять коэффициент усиления так, что бы коэффициент усиления всей замкнутой системы изменялся в допустимых пределах. Реализация условия возможна при дискретном изменении коэффициента усиления в исполнительном уст ройстве. При MsmdM изменении коэффициента усиления объекта 1 за время переходного процесса в системе величина регулирукнцего воздействия на объект 1 характеризует коэффициент усиления объекта. Величина регулирук1щего воздействия, при котором необходимо изменять коэффициент усиления объекта, зависит от текущего значения регули- руемого параметра, формы статической характеристики объекта 1 и допустимого Диапазона изменения его ко эффициента усиления. Текущее значение регулируемого ла раметра контролнруеся датчиком 3 регулируемого параметра, подключенным к функциональному выходу объекта 1, сигнал с которого сравнивается с заданным значением в первом блоке 5 сравнения и преобразуется регулятором 6 в непрерывный управляющий сигнал, поступающий на сигнальный вход первого коммутатора 7 и на исполнительный механизм 8, подключенньш к его первому выходу, который кинематически связан с регулирующим органом 10, воздействующим на объект 1 регулирования малым потоком. Непрерывньй унифицированный сигнал U.j с датчика 12 положения регулирующего органа 10 малого потока, характеризующий управлякнцее воздействие на объект 1 регулирования через сигнальньй вход второго коммутатора 14, поступает на встроенный элемент, где сравнивается с некоторьм пороговым сигналом Un , определяюпщм диапазон его изменения. (Jn коэффициент воздействия К больше, чем коэффициент воздействия К, , соответствующий величине входного сигнала датчика 12 положения Ц, Uf, . ВоЗ никающие на выходе элементы сравнения второго коммутатора 14 импульсы U , длительность которых соответствует времени, в течение которого выходной сигнал датчика положения и Y управляют работой второго ключа 17 через повторитель (не показан) , согласующий его входное сопротивление с выходным сопротивлением элемента сравнения второго коммутатора 14. Через второй ключ 17 выходной сигнал источника 21 постоянного напряжения подключается к первому входу инерционного блока 18, к выходу которого подключен управлякидий вход первого ключа 16, Так как выходной сигнал инерционного блока 18 изменяется по экспоненциальному закону, то он достигает величины порога срабатывания U первого ключа 17 через время соответствующее времени запаздывания объекта 1 регулирования, определяемое параметрами апериодического звена 24 и величиной сигнала U , поступающего на усилитель 22 с выхода второго блока 19 сравнения, входы которого подключены к выходу задатчика 20 расхода и к выходу датчика 2 расхода. Следовательно, первый ключ 16 сработает через время после поступления сигнала на вход инерционного блока 18. При срабатывании первого ключа 16 сиг-. йал с его ьькода поступает на управляющий вход первого коммутатора 7. В этом случае к выходу регулято- . ра 6 дополнительно подключается исполнительный механизм 9, связанный кинематически с регулирующим органом 11 большого потока, реализующий дискретное регулирующее воздействие на объект 1 регулирования с коэффициентами К К 7 Kj, . При значительном изменении регулируемого параметра, при котором предельное регулирующее воздействие на объект 1 регулирования достигнет коэффициента К К, унифицированный сигнал и 5 с датчика 13 положения большого потока,.подключенного к управляющему входу второго коммутатора 14 также достигнет своего предельного значения и на втором выходе второ го коммутатора 14 появится сигнал, используемый для воздействия на объект 1 регулирования по другим каналам, не Предусмотренным данной систе мой или для сигнализации о предельно коэффициенте регулирующего воздействия на объект 1 регулирования о необходимости выключения системы регулирования. Система работает следующим образом. I Непрерывный сигнал рассогласования между выходными сигналами датчика 2 расхода и задатчика 20 расхода с выхода второго блока 19 сравнения поступает на второй вход инерционного блока 18. Выходной сигнал датчика регулируемого параметра 3, характеризующий возмущение в объекте 1 регулирования, поступает совместно с выходным сигналом задатчика 4 на входы первого блока 5 сравнения выходной сигнал которого преобразует ся регулятором 6 в управляющий сигнал, поступающий через сигнальный вход коммутатора 7 на его пёрвьй выход и на первый исполнительный механизм 8, связанный кинематически с первым регулирующим органом 10,во действующим на объект 1 регулирования маль потоком. Первый датчик 12 положения, связанный с первичным пре образователем положения первого регу лирующего органа 10, установленного на первом исполнительном механизме 8 формирует на своем выходе непрерывный унифицированный сигнал, которьй через сигнальный вход второго коммутатора 14 поступает на встроенньй элемент сравнения, где сравнивается с внутренним пороговым сигналом. При сигнале с выхода датчика 12 положени превышающем внутренний пороговый сиг нал второго коммутатора, на его выходе формируется сигнал, которьй при водит к срабатыванию второго ключа, управляющим входом подключенного к выходу второго коммутатора 14. Через второй ключ 17 источник постоянного напряжения подключается к первому входу инерционного блока 18, выходной сигнал которого в зависимости от параметров его усилителя 22 и апериодического звена 24 и величины сигнала, подаваемого на второй вход инерционного блока 18 с выхода второго блока 19 сравнения через время транспортного запаздывания объекта 1 регулирования достигает значения,обеспечивающего срабатывания первогоключа 16, подключенного к выходу инерционного блока 18. Через первый ключ 16 сигнал с первого выхода второго коммутатора 14 подается на управляющий вход первого коммутатора 7, в результате чего к выходу регулятора 6 через первый коммутатор 7 дополнительно подключается второй исполнительный механизм 9,связанный кинематически с вторым регулирующим органом 11, воздействующим на. объект 1 регулирования большим потоком. Максимальное значение унифицированного сигнала на выходе второго датчика 13 положения, подключенного к сигнальному входу коммутатора 14, обеспечивает, подачу на второй выход второго коммутатора 14 сигнал, характеризующий предельньй коэффициент регулирующего воздействия на объект 1 регулирования используемьй в других системах управления, сигнализации, блокировки и др. Формирование выходного сигнала и18 инерционного блока 18 приведено на фиг. 2. Преобразование непрерывного унифицированного сигнала на выходе встроенного элемента сравнения второго коммутатора 14 в последовательность прямоугольных Импульсов на входе первого ключа 16 инерционного блока 18 приведено на фиг. 3„Временные задержки Т goo прямоугольных импульсов, поступающих на управляющий вход коммутатора 7, приведены на фиг. 3. Получение резкого фронта и среза формы сигнала U, , управляющего первым коммутатором 7 достигается тем, что при возникновении импульса сигнала и, первый ключ 16 включается при истечении времени запаздьшания объекта 1 регулирования, соединяя первый выход второго коммутатогра 14 с управляющим вхрдом первого коммутатора 7, при установившемся значении IJjf .При исчезновении импульса напряжения t} первый коммутатор 7 также выключается, таж KaK,H,L)ft i .хотя первый ключ 16 некоторое время достаётся включенным за счет инерционных свойств инерционного блока 18. Отличительйые особенности предлага Ьмой стстемЫ регулирования позволяют примерно в 6 раз повысить ее точность. от 2 ig Предлагаемая система позволяет значительно повысить качество -регулирования объектов, обладающих переменным коэффициентом усиления и транспортным запаздыванием, изменяющихся в широких пределах, путем дискретного изменения коэффициента усиленця в контуре регулирования управляющими импульсами, формирующимися в зависимости от текущего времени зайаздьшания. объекта регулирования, ke вызывая колебания в системе при -возникновении переходного процесса./
Utj) -
Jf16
Й:
faan
%
Ucp
; i-zTzjii/n::iii Щ9
-I1J-J t
UlS
Tsm
2y
XT
y
.t
П
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система регулирования | 1977 |
|
SU924668A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
