(5А) СИСТЕМА РЕГУЛИРОВАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования | 1983 |
|
SU1141377A2 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Многоточечная релейно-импульсная система для автоматического регулирования параметров технологического процесса | 1979 |
|
SU962840A1 |
| Многоканальный регулятор | 1982 |
|
SU1100606A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Система автоматического регулирования | 1988 |
|
SU1569802A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Устройство для регулирования температуры | 1980 |
|
SU877491A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Устройство для автоматического управления питанием барабанного котлоагрегата | 1976 |
|
SU861841A1 |

1
Изобретение относится к системам регулирования выходного параметра объекта путем изменения расхода твердых, жидких или газообразных материальных потоков, в особенности при управлении объектами с переменным коэффициентом усиления и транспортным запаздыванием, в частности для регулирования щелочности пульпы в цикле измельчения при обогащении руд цветных металлов.
Известна система регулирования, содержащая последовательно соединенные задатчик, элемент сравнения, регулятор, первый коммутатор, первый исполнительный механизм, первый регулирующий орган, датчик положения первого регулирующего органа и второй коммутатор, второй выход перво- го коммутатора через последовательно соединенные второй исполнительный механизма, второй регулирующий орган и датчик положения второго регулирующего органа подключен к второму входу второго коммутатора, выходы первого и второго регулирующих органов соединены соответственно с первым и вторым входами объекта регулирования, выход которого через датчик регулируемого параметра соединен с вторым входом элемента сравнения t11«
Недостаток известного устройства состоит в относительно низкой динамической точности системы.
Цель изобретения - повышение динамической точности регулирования объектов с. переменным коэффициентом усиления и т.ранспортным запаздыванием.
Поставленная цель достигается тем, что в системе регулирования дополнительно установлен блок задержки, вход которого соединен с выходом второго коммутатора, а выход - с входом первого коммутатора.
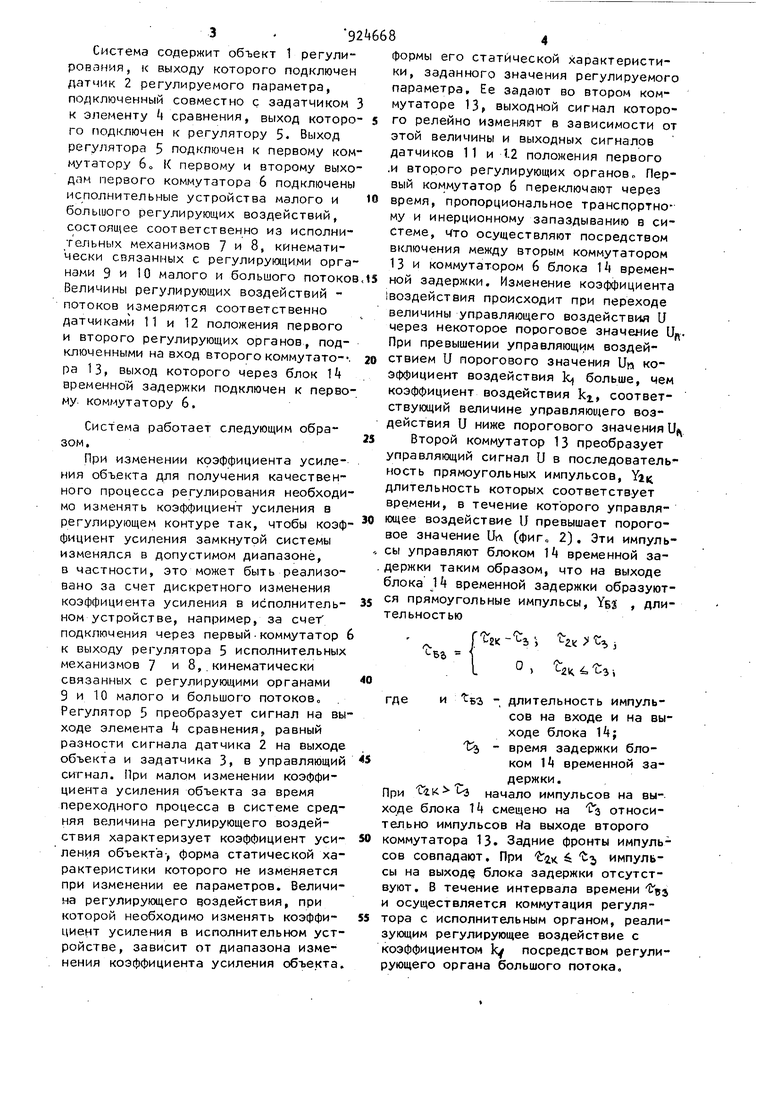
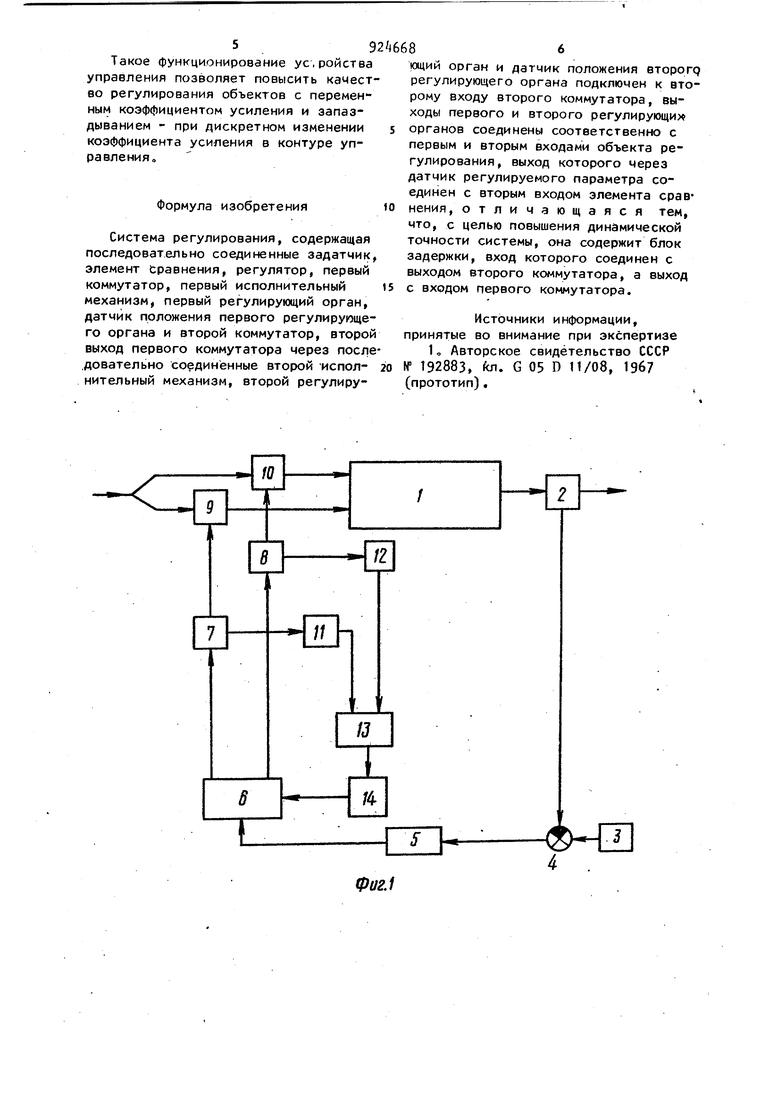
На фиг. 1 приведена блок-схема системы; на фиг. 2 - временные диаграммыСистема содержит объект 1 регулирования, к выходу которого подключен датчик 2 регулируемого параметра, подключенный совместно с задатчиком к элементу Ц сравнения, выход которо го подключен к регулятору 5. Выход регулятора 5 подключен к первому ком мутатору 6 о К первому и второму выхо дам первого коммутатора 6 подключены исполнительные устройства малого и большого регулирующих воздействий, состоящее соответственно из исполнительных механизмов 7 и 8, кинематически связанных с регулирующими орга нами 9 и 10 малого и большого потоко Величины регулирующих воздействий потоков измеряются соответственно датчиками 11 и 12 положения первого и второго регулирующих органов, подключенными на вход второго коммутато--. ра 13, выход которого через блок Н временной задержки подключен к первоMy коммутатору 6f Система работает следующим обраПри изменении коэффициента усиле-. ния объекта для получения качественного процесса регулирования необходиМО изменять коэффициент усиления в регулирующем контуре так, чтобы коэффициент усиления замкнутой системы изменялся в допустимом диапазоне, в частности, это может быть реализовано за счет дискретного изменения коэффициента усиления в исполнительном устройстве, например, за счет подключения через первыйкоммутатор 6 к выходу регулятора 5 исполнительных механизмов 7 и 8,.кинематически связанных с регулирующими органами 9 и 10 малого и большого потоков. Регулятор 5 преобразует сигнал на вы ходе элемента k сравнения, равный разности сигнала датчика 2 на выходе объекта и задатчика 3, в управляющий сигнал. При малом изменении коэффициента усиления объекта за время переходного процесса в системе средняя величина регулирующего воздействия характеризует коэффициент усиления объекта-, форма статической характеристики которого не изменяется при изменении ее параметров. Величина регулирующего воздействия, при которой необходимо изменять коэффициент усиления в исполнительном устройстве, зависит от диапазона изменения коэффициента усиления объекта.
СОВ совпадают. При t 5 импульсы на выходу блока задержки отсутствуют. В течение интервала времени tes и осуществляется коммутация регулятора с исполнительным органом, реализующим регулирующее воздействие с коэффициентом k посредством регулирующего органа большого потока. формы его статической характеристики, заданного значения регулируемого параметра. Ее задают во втором коммутаторе 13 выходной сигнал которого релейно изменяют в зависимости от этой величины и выходных сигналов датчиков 11 и 1.2 положения первого .и второго регулирующих органов Первый коммутатор 6 переключают через время, пропорциональное транспортному и инерционному запаздыванию в системе, что осуществляют посредством включения между вторым коммутатором 13 и коммутатором 6 блока временной задержки. Изменение коэффициента 1воздействия происходит при переходе величины управляющего воздействия U через некоторое пороговое значение Up. При превышении управляющим воздействием U порогового значения Un коэффициент воздействия k больше, чем коэффициент воздействия kj, соответствующий величине управляющего воздействия и ниже порогового значения U Второй коммутатор 13 преобразует Управляющий сигнал U в последователь ° прямоугольных импульсов, Ya Длительность которых соответствует времени, в течение которого управля ee воздействие IJ превышает пороговое значение Ол Сфиг„ 2). Эти импульсы управляют блоком I временной задержки таким образом, что на выходе блока И временной задержки образуются прямоугольные импульсы, YiS , длительностью ( г. %з Z Ъ i ) (-214 4 из i где и 63 - длительность импульсов на входе и на выходе блока ; 3 - время задержки блоком И временной за держки. При L начало импульсов на выходе блока 14 смещено на Сз относительно импульсов Ufa выходе второго коммутатора 13. Задние фронты импуль5 .9 Такое функционирование устройства управления позволяет повысить качество регулирования объектов с переменным коэффициентом усиления и запаздыванием - при дискретном изменении коэффициента усиления в контуре управления. Формула изобретения Система регулирования, содержащая последовательно соединенные задатчик, элемент сравнения, регулятор, первый коммутатор, первый исполнительный механизм, первый регулирующий орган, датчик положения первого регулирующего органа и второй коммутатор, второй выход первого коммутатора через после .довательно соединённые второйисполнительный механизм, второй регулиру8щии орган и датчик положения второгр регулирующего органа подключен к второму входу второго коммутатора, выходы первого и второго регулирующих органов соединены соответственно с первым и вторым входами объекта регулирования, выход которого через датчик регулируемого параметра соединен с вторым входом элемента сравнения, отличающаяся тем, что, с целью повышения динамической точности системы, она содержит блок задержки, вход которого соединен с выходом второго коммутатора, а выход с входом первого коммутатора. Источники информации, ринятые во внимание при экспертизе 1„ Авторское свидетельство СССР .„ ,. .„,.„..,„,.„„ 192883, foi. G 05 D 11/08, 19б7 (прототип),
и,
%
Фиг. 2
