Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для автоматического вождения сельскохозяйственных машин по рядкам растений.
Известно устройство для автоматического управления движения сельскохозяйственной машины по рядкам растений, содержаш,ее датчики рассогласования, выполненные в виде ш,упов, кинематически связанных со штангой и пружинами золотника гидрораспределителя 1 .
Недостатком этого устройства является невозможность перевода датчиков в транпортное положение.
Наиболее близким к предлагаемому является копируюш,ее устройство для автоматического направления движения сельскохозяйственных машин по рядкам растений, содержаш,ее датчики в виде щупов, установленных на раме посредством параллелограммных механизмов навески, выполненных в виде шарнирно размеш,енных на держателях рамы рычагов, шарнирно связанных с датчиками 2.
Недостатками известного устройства являются неточное вождение в междурядьях сельскохозяйственных культур в случае наличия перегнутых и полегших растений, а также отсутствие подъемника датчиков копирующего устройства в транспортное положение.
Цель изобретения - повышение качества выполнения технологического процесса путем осуществления копирования полегших растений и осуществления перевода устройства в транспортное положение.
Поставленная цель достигается тем, что в копирующем устройстве для автоматического направления движения сельскохозяйственных машин по рядкам растений, содержащем датчики в виде щупов, установленных на раме посредством параллелограммных механизмов навески, выполненных в виде шарнирно размещенных на держателях рамы рычагов, шарнирно связанных с датчиками, один из рычагов каждого параллограммного механизма навески датчиков снабжен закрепленным на нем фиксатором датчика, выполненным в виде установленного в гнезде во втулке подпружиненного стопора, в одном из-держателей выполнено отверстие для размещения в нем стопора, а датчики снабжены жестко закрепленными на них обтекателями.
Подпружиненный стопор снабжен закрепленным на нем управляющим тросом, а снаружи гнезда подпружиненного стопора посредством дополнительной втулки и рычага установлен ролик, взаимодействующий с управляющим тросом, при этом держатель и дополнительная втулка имеют кронштейны, щарнирно связанные между собой посредством тяги.
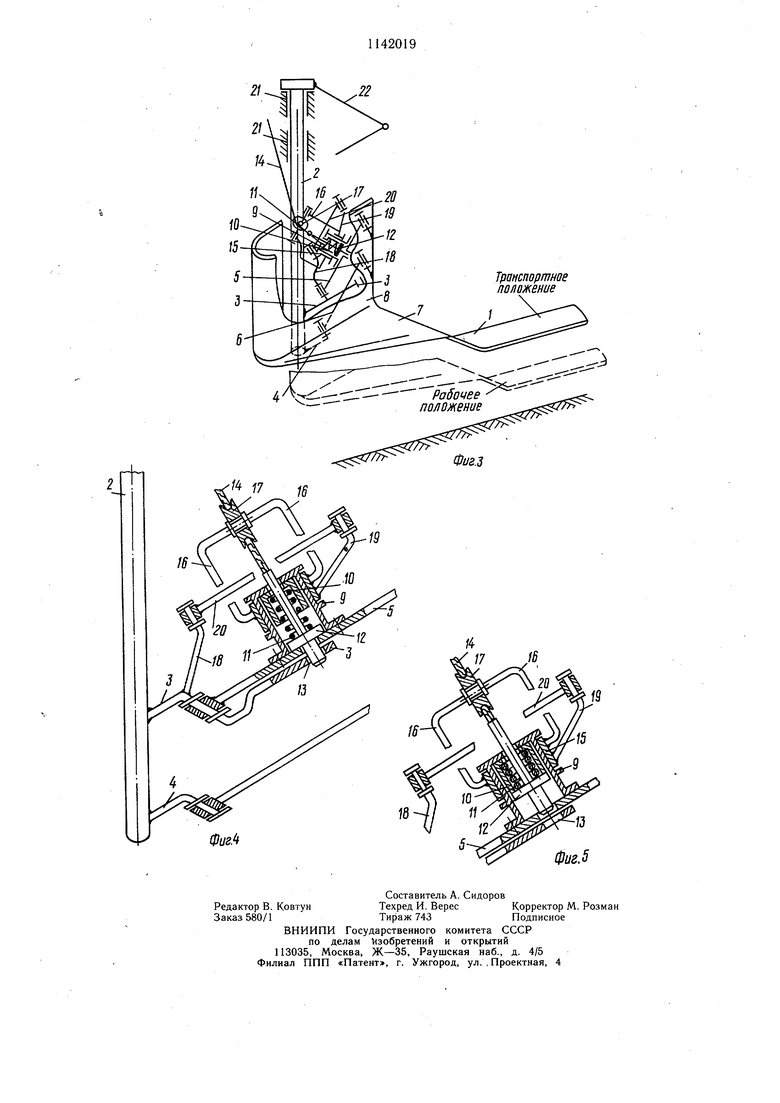
На фиг. I изображено копирующее устройство для автоматического направления движения сельскохозяйственных машин по
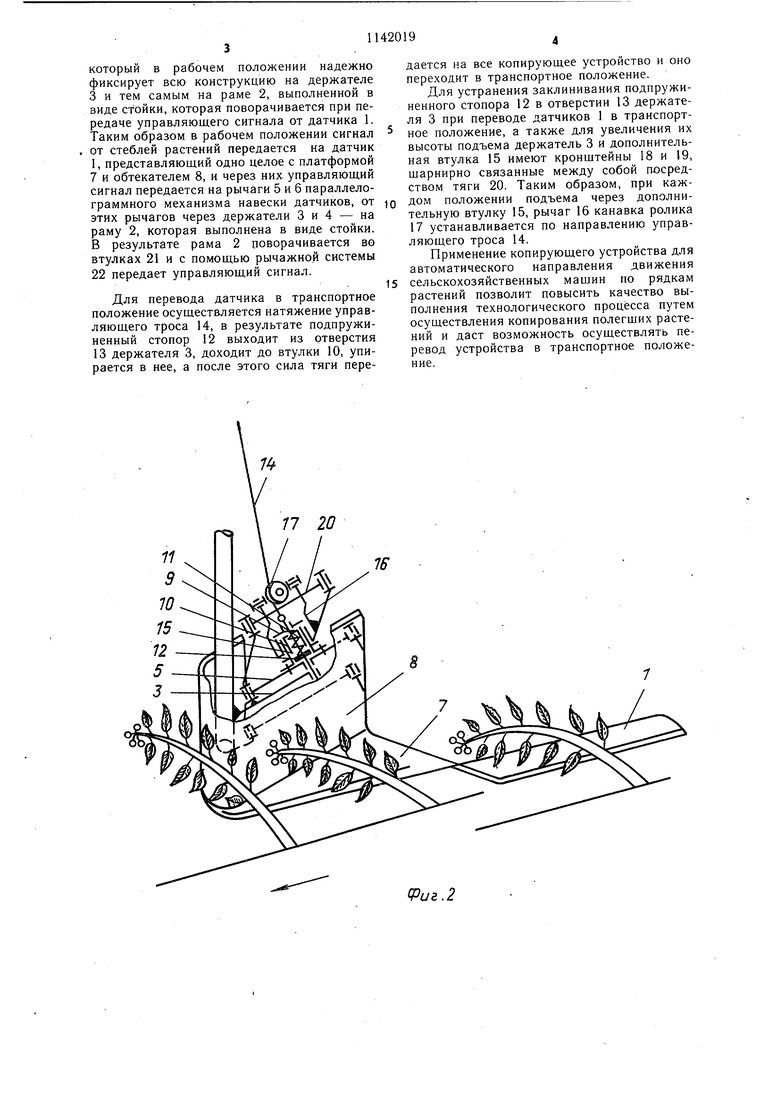
рядкам растений; на фиг. 2 - один из датчиков устройства в рабочем положении при наличии перегрунтых растений; на фиг. 3 - один из датчиков устройства в транспортном положении; на фиг. 4 - подпружиненный стопор копирующего устройства в рабочем положении; на фиг. 5 - то же, в транспортном положении.
Копирующее устройство для автоматического направления движения сельскохозяйственных машин по рядкам растений содержит датчики 1 в виде щупов, установленных на раме 2 в виде стойки посредством параллелограммных механизмов навески, выполненных в виде шарнирно размещенных на держателях 3 и 4 рамы рычагов
5 5 и 6. Датчики 1 снабжены жестко закрепленными на них посредством платформ 7 обтекателями 8, с которыми шарнирно связаны рычаги 5 и 6. Один из рычагов 5 каждого параллелограммного механизма навески датчиков 1 снабжен закрепленным
0 на нем фиксатором датчика, выполненным в виде установленного в гнезде 9 во втулке 10 подпружиненного пружиной li стопора 12. В одном из держателей 3 выполнено отверстие 13 для размещения в нем стопора 12, а подпружиненный стопор 12 снабжен
5 закрепленным на нем управляющим тросом 14. Снаружи гнезда 9 подпружиненного стопора 12 посредством дополнительной втулки 15 и рычага 16 установлен ролик 17, взаимодействующий с управляющим тросом 14, при этом держатель 3 и дополнитльная втулка
0 15 имеют кронщтейны 18 и 19, щарнирно связанные между собой посредством тяги 20. Управляющий сигнал от датчиков 1 передается установленной во втулках 21 рамой 2 рычажной системе 22; копирующее устройство установлено на поперечной рейке 23.
5 Копирующее устройство для автоматического направления движения сельскохозяйственных машин по рядкам растений работает следующим образом.
Для отбора точного управляемого сигнад ла щупы должны быть расположены на малом расстоянии от поверхности земли с учетом того, что в междурядиях плантаций часто встречаются перегнутые и полегшие растения, которые являются источниками ложных сигналов. Кроме того, при повороте в конце гона или при транспортировке машины необходим подъем щупов.
В предлагаемом копирующем устройстве датчики 1 в рабоче.м положении расположены на малом расстоянии от поверхности
0 земли и так зафиксированы, что перегнутые и полегшие растения их не поднимут выше, а при необходимости во время поворота в конце гона или транспортировке тракторист может из кабины трактора поднять датчики 1 на соответствующую высоту. Для этого на
5 рычагах 5 параллелограммных механизмов навески закреплены фиксаторы датчика, выполненные в виде установленного в гнезде 9 во втулке 10 подпружиненного стопора 12,
который в рабочем положении надежно фиксирует всю конструкцию на держателе 3 и тем самым на раме 2, выполненной в виде стойки, которая поворачивается при передаче управляющего сигнала от датчика 1. Таким образом в рабочем положении сигнал от стеблей растений передается на датчик I, представляющий одно целое с платформой
7и обтекателем 8, и через них управляющий сигнал передается на рычаги 5 и 6 параллелограммного механизма навески датчиков, от этих рычагов через держатели 3 и 4 - на раму 2, которая выполнена в виде стойки.
8результате рама 2 поворачивается во втулках 21 и с помощью рычажной системы 22 передает управляющий сигнал.
Для перевода датчика в транспортное положение осуществляется натяжение управляющего троса 14, в результате подпружиненный стопор 12 выходит из отверстия 13 держателя 3, доходит до втулки 10, упирается в нее, а после этого сила тяги передается на все копирующее устройство и оно переходит в транспортное положение.
Для устранения заклинивания подпружиненного стопора 12 в отверстии 13 держателя 3 при переводе датчиков 1 в транспортное положение, а также для увеличения их высоты подъема держатель 3 и дополнительная втулка 15 имеют кронщтейны 18 и 19, щарнирно связанные между собой посредством тяги 20. Таким образом, при каждом положении подъема через дополнительную втулку 15, рычаг 16 канавка ролика 17 устанавливается по направлению управляющего троса 14.
Применение копирующего устройства для автоматического направления движения
сельскохозяйственных мащин по рядкам растений позволит повысить качество выполнения технологического процесса путем осуществления копирования полегщих растений и даст возможность осуществлять перевод устройства в транспортное положение.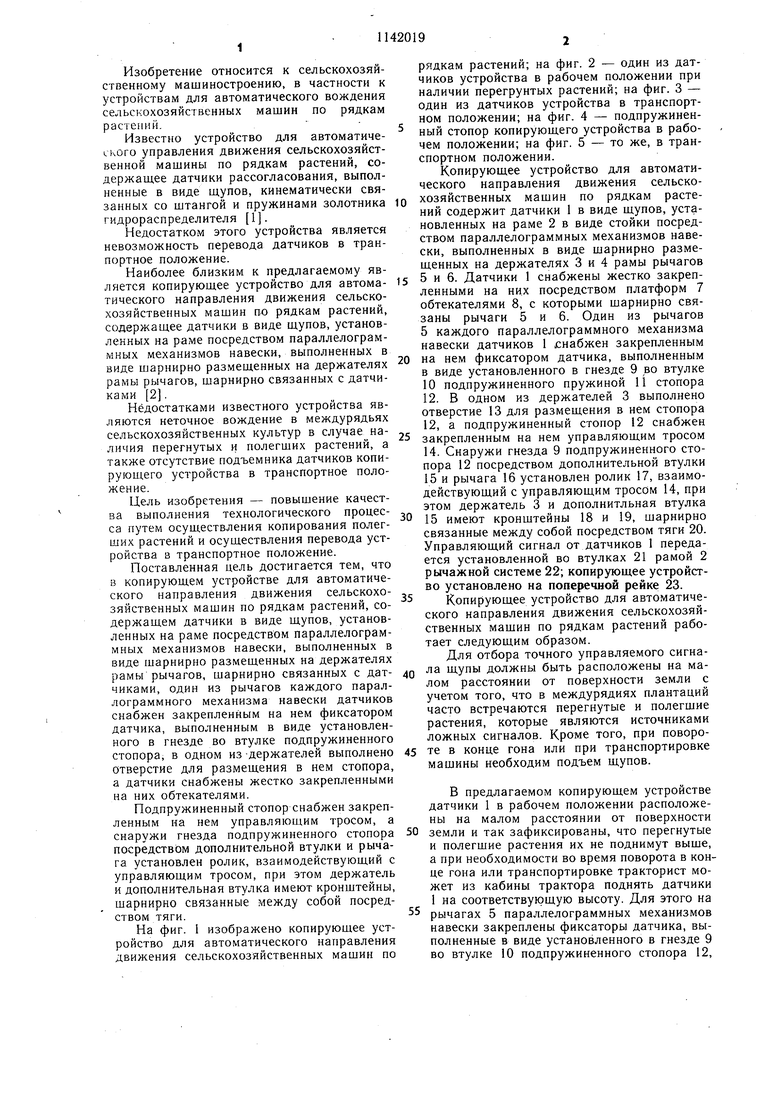
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОЖДЕНИЯ ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ ПО РЯДКАМ РАСТЕНИЙ | 2007 |
|
RU2354102C1 |
| Устройство для автоматического управления сельскохозяйственной машиной по рядкам свеклы | 1982 |
|
SU1036266A1 |
| УСТРОЙСТВО ДЛЯ ВОЖДЕНИЯ ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ ПО РЯДКАМ РАСТЕНИЙ | 2011 |
|
RU2485744C1 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| УСТРОЙСТВО ДЛЯ РАСКРЫТИЯ КОРНЕВОЙ СИСТЕМЫ ВЕГЕТАТИВНО РАЗМНОЖАЕМЫХ ПОДВОЕВ | 2006 |
|
RU2335110C2 |
| УСТРОЙСТВО ДЛЯ РАСКРЫТИЯ КОРНЕВОЙ СИСТЕМЫ ВЕГЕТАТИВНО РАЗМНОЖАЕМЫХ ПОДВОЕВ | 2010 |
|
RU2458497C1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| КОПИРУЮЩИЙ ЩУП КОРИЕКЛУБНЕУБОРОЧНОЙМАШИНЫ | 1969 |
|
SU246181A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| УСТРОЙСТВО КОРРЕКЦИИ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА ПОПЕРЕК СКЛОНА | 2001 |
|
RU2195097C1 |
1. КОПИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН ПО РЯДКАМ РАСТЕНИЙ, содержащее датчики в виде щупов, установленных на раме посредством параллелограммных механизмов навески, выполненных в виде шарнирно размещенных на. держателях рамы рычагов, шарнирно связанных с датчиками, отличающееся тем, что с г целью повышения качества выполнения технологического процесса путем осуществле- ния копирования полегших растений, один из рычагов каждого параллелограммного механизма навески датчиков снабжен закрепленным на нем фиксатором датчика, выполненным в виде установленного в гнезде во втулке подпружиненного стопора, в одном из держателей выполнено отверстие для размещения в нем стопора, а датчики снабжены жестко закрепленными на них обекателями.I 2. Устройство по п. 1, отличающееся тем, что с целью осуществления его перевода в транспортное положение, подпружиненный стопор снабжен закрепленным на нем управляющим тросом, а снаружи гнезда подпружиненного стопора посредством дополнительной втулки и рычага установлен ролик, взаимодействующий с управляющим тросом, (Л при этом держатель и дополнительная втулка имеют кронштейны, шарнирно связанные между собой посредствЪм тяги. NJ ю :о 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU178197A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ВСЕСОЮЗНАЯ [тип г ;•-.';•:'••;• :; ' S lRU-i(.>&.S'r' ' !* •:•••.Р.ЫР.П!ЛП | 0 |
|
SU309670A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
