(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ
1
Изобретение относится к сельскохозяйственному машиностроению и предназначено для автоматического направления движения преимущественно самоходных уборочных мащин.
Наиболее близким к изобретению является устройство для автоматического вождения самоходной свеклоуборочной машины по рядкам растений, содержащее раму, блок датчиков, соединенных рычагами с подвеской и плунжером золотника следящей гидросистемы, механизм обрач ной связи с соединенным с подвеской управляемых колес рычагом и механизм переключения с корректирующим приспособлением ll .
.Это устройство неудобно при использовании его для автоматического вождения самоходного капустоуборочного комбайна с фронтально навешенным срезаюншм аппаратом и задними управляемыми колесами
МАШИНЫ
Установленный впереди срезающего аппарата механизм подачи сигнала вызывает необходимость увеличения жесткости приемо-жатвенной части комбайна. Перегрузка копирующих колес связана с нарушением технологического процесса при подъеме, выравнивании и обрезке кочанов в срезающем аппарате. При движении по почве пассивные копир-датчики постояино забиваются сорной растительностью и землей. Соприкасаясь с растениями, копн1 датчики загнутыми носовыми частями повреждают кочаны. При использовании устройства на самоходных комбайнах с задними управляемыми колесами значительно усложняется механическая обрат ная связь, а при работе на почве с гребневым профилем поверхности устойчивость системы снижается.
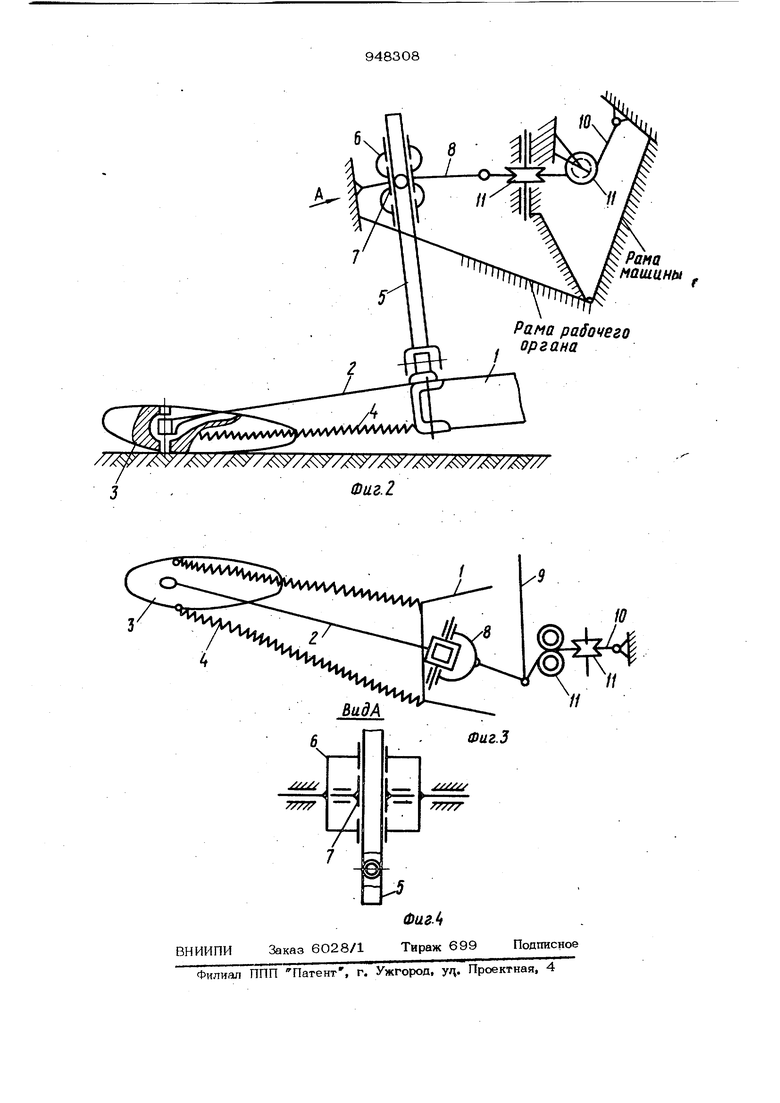
Кроме того, механизм подачи сигнала не дает возможности контролировать процесс захода кочанов в срезающий аппарат, поэтому корректировка устройства во вре мя работы комбайна затруднительна. Цель изобретения - повышение надежности работы устройства. Цель достигается тем, что механизм обратной связи снабжен двумя гидроцилиндрами, полости которых соединены между собой, а штоки соответственно с рычагом обратной связи и корпусом золотника, причем датчики снабжены приводом, выполненным в виде коленчатого вала, соседние шатунные шейки которого смещены относительно друг друга на 180° а щупы датчиков, имеют эллипсовидную форму и подпружинены относительно рам блока датчиков, навеска блока датчиков имеет телескопические валь1, одни звенья которых посредством универсального шарнира связаны с рычагами датчиков, а другие посредством шарнирных вилок и трособлочных систем - с рамой машины. На фиг. 1 изображена схема устройств ва; на фиг. 2 - элемент механизма подач сигнала, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - вид по стрелке А на фйг. 2. Устройство для автоматического напра ления движения самохЬЬных сельскохозяйciBeHHbix машин по функциональному назначению разделяется на следующие механизмы и системы: механизм подачи сигнала, следящая гидросистема, механизм обратной связи и механизм переключения с корректирующим устройством. Механизм подачи сигнала состоит из датчиков, вьшолненных в виде жесткого основания 1 и подвижной в поперечном направлении носовой части, содержащей рычаг 2, один конец которого шарнирно крепится в основании 1, а на другом шар нирно установлен эллипсовидный щуп 3. Боковые стороны основания 1 и эллипсоввдного щупа 3 связаны предварительно растянутыми пружинами 4. Рычаг 2 шарнирно крепится к подвеске, которая состоит из квадратного вала 5, качающейся рамки 6 с круглыми отверстиями и втулки 7 с квадратным отверстием. Втулка 7 посредством вилки 8 шарнир но связана с поперечной тягой 9, На концах поперечной тяги 9 закреплены тросовые тяги 10, которые пропущены через блоки 11 и свободными концами закреплены на раме машины. Датчики приводятся, в движение посред ством коленчатого вала 12, шатунные шейки которого разнесены друг относител но друга на 180°. Поперечная тяга 9 посредством крон- . штейна 13 связана со следящей гидросистемой. Следящая гидросистема состоит из насоса 14, золотникового распределителя 15, гидроцилиндра 16 управления, масляного бака 17 и трубопроводов 18 - 24. Механизм обратной связи содержит гидроцилиндр 25, шток которого закреплен в корпусе золотникового распределителя 15. Гидроцилиндр 25 посредством трубопроводов 26 и 27 связан с гидро1шлиндром 28, установленным в задней части комбайна. Шток гидроцилиндра 28 шарнирно крепится к четырехзвенной навеске управляемого моста, которая состоит из продольных звеньев 29, 30 и поперечного звена 31. К звену 31 шарн1фно крепится балка 32 заднего .управляемого моста. На продольном звене 29 установлены с одной стороны рычаг 33, шарнир- но связанный с управляемыми колесами 34, ас другой стороны - рычаг 35, связанный с гидроцилиндром 28 механизма . обратной связи. К трубопроводам 26 и 27 гидропередачи обратной связи подсоединены трубопроводы 36 и 37 от насоса-дозатора 38 корректирующего устройства. Механизм переключения вьшолнен в виде крана распределителя 39, который для удобства изображения рассечен тремя плоскостями, перпендикулярными оси золотника. Распределитель имеет два положения : 1-е - автоматическое управление (пазы золотника показаны жирными линиями), 2-е - ручное управление (пазы золотника показаны штриховыми линиями). Насос-дозатор 38 связан с трубопроводом 40. Устройство работает- следующим образом. При движении машины вдоль убираемых рядков датчики сколь зят в междурядьях. Возвратно-поступательные перемещения, получаемые датчиками от вращающегося коленчатого вала 12, способствуют само- очистке от сорной растительности и земли. При отклонении ведущих колес и ере- зающего. аппарата от линии междурядьев под воздействием гребней и рядков растений происходит перемещение эллипсовидных щупов 3. Одновременно поворачиваются рычаг 2, квадратный вал втулки 7, вилка 8 и поперечная тяга 9. Кронштейн 13, связанный с поперечной тягой 9, воздействует на золотник распределителя 15 и смещает его от нейтрального положения. 59 Одновременно с перемещением тяги У и 10 вытягивается из блоков 11, и рама рабочего органа вместе с механизмом подачи сигнала поднимается вверх на определенную высоту, накапливая энергию для возврата датчиков в исходное положение. Получив сигнал, золотник перекрьшает отверстия в распределителе 15 и масло от насоса 14 по трубопроводам 18, 19, 21 и 24 поступает в одну из полостей гидрошшиндра 16. Шток гидроцилйндра 16 толкает продольные звенья 30 и 29 в сторону. При этом срабатывает механизм обратной связи. Под воздействием рычага 35 поршень гидроштиндра 28 перегоняе масло по трубопроводу 26 или 27 в гидроишпиндр 25. Шток гидроцилиндра 25 перемещает корпус распределителя 15. Из противоположной полости гидроцилиндра 25 масло перетекает по трубопроводу 27 или 26 в свободную полость гид рошшиндра 28. При совмещении корпуса с золотником, соответствующем нейтральному положению, поворот управляемых колес 34 прекращается. Управляемые колеса 34, находясь в к такте с почвой, передают реакцию почвы на четырехзвенную навеску и толкают раму машины в противоположную сторону Рама, перемещаясь вокруг передних ведущих колес, смещает срезающий аппарат вместе с механизмом подачи сигнала в противоположную сторону, ликвидируя поперечную ошибку между клавишами и бороздами. С другой стороны, продольное звено 29 через рычаг 33 и систему rsir воздействует на управляемые колеса 34, поворачивая их вокруг своей оси. При прохождении машиной определенного расстояния поперечная ошибка также будет ликвидирована. При необходимости введения корректировки в. процессе автоматического вождения (отсутствие направляющих гребней и рядков, потеря рядка и др.) оператор поворотом руля врашает насос-дозатор 38, который по одному из трубопроводов 36 и 37 подает масло в гидропередачу обратной связи. В результате шток гидроцилйндра 25 перемещается и толкает корпус распределителя 15 в нужз1ую сторону. В режиме автоматического управления насос-дозатор управляет корректировочным гвдроцилиндром без гидроусиления. 8 В режиме ручного управления масло из бака 17 через насос 14, трубопроводы 18 и 4О пхютупает в насос-дозатор 38. При повороте рулевого колеса в ту или другую сторону масло из насоса-дозатора 38 по трубопроводам 36, 37, соответствующие каналы крана распределителя 39, трубопроводам 23 и 24 поступает в одну из полостей гидроцилиндра 16 управляемых колес. В нейтральном положении руля масло вхолостую по трубопроводу 20 перекачивается на слив в бак 17. Наличие в устройстве механизмаобратной связи с гидропередачей и четырехзвенной навеской управляемого моста позволяет увеличить устойчивость автоматической системы, обеспечивает автоматическое управление уборочной машины на переувлажненной почве с гребневой поверхностью, т. е. .в условиях, когда устройства с обычной механической обратной связью неработоспособны. Наличие в механизме подачи сигнала приводного коленчатого вала и активных датчиков устраняет забиваемость механизма сорной растительностью и юмлей и повышает надежность процесса чождения уборочной машины по гребням к ркдкам растений. Установка датчиков на телескопических подвесках, обеспечивающих передачу крутяшего момента от подвижньпс носовых частей к поперечной тяге, сокращает.габаритные размеры механизма подачи сигнала, снижает повреждаемость продукции и yлyчшaet контроль процесса вождения агрегата по рядкам растений. Формула изобретения 1. Устройство для автоматического направления движения самоходной сельскохозяйственной машины, содержащее раму, блок датчиков, соединенных рычагами с подвеской и плунжером золотника следящей гидросистемы, механизм обратной связи, имеющий соединенный с подвеской управляемых колес рычаг и механизм переключения с корректирующим приспособлением, отличающееся тем, что, с цепью повышения надежности в работе, механизм обратной связи снабжен двумя гидрошшиндрами, полости которых соединены мезкду собой, а штоки соответственно с рычагом обратной связи rf корпусом золотника.
2.Устройство по п. 1, отличающееся тем, что датчики снабжены приводом, выполненным в виде коленчатого вала, соседние шатунные шейки которого смещены относительно друг дру- па на 180°.
3.Устройство по п. 1, о т л и ч а ющ е е с я тем, что щупы датчиков имеют эллипсовидную форму и подпружинены относительно рамы блока датчиков.
4.Устройство по п. 1, о т л и ч а ющ е е с я тем, что навеска блока датчиков имеет телескопические валы, одни звенья которых посредством универсая ного шарнира связаны с рычагами датчиков, а другие посредством шарнирных, вилок и трособлочных систем - с рамой машины.
Источники информации, принятые во внимание при экспертизе
I. Машина корнеуборочная самоходная КС-6. Руководство по эксплуаташш. Тернополь, Облполиграфиздат, 1979.



| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| Самоходная корнеклубнеуборочная машина | 1982 |
|
SU1090276A1 |
| Гидромеханическое устройство для автоматического вождения сельскохозяйственной машины по борозде | 1988 |
|
SU1604184A1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1505454A1 |
| Система автоматического вождения сельскохозяйственной машины по борозде | 1985 |
|
SU1387888A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1982 |
|
SU1113011A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1980 |
|
SU950212A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1990 |
|
SU1752215A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1980 |
|
SU882440A1 |