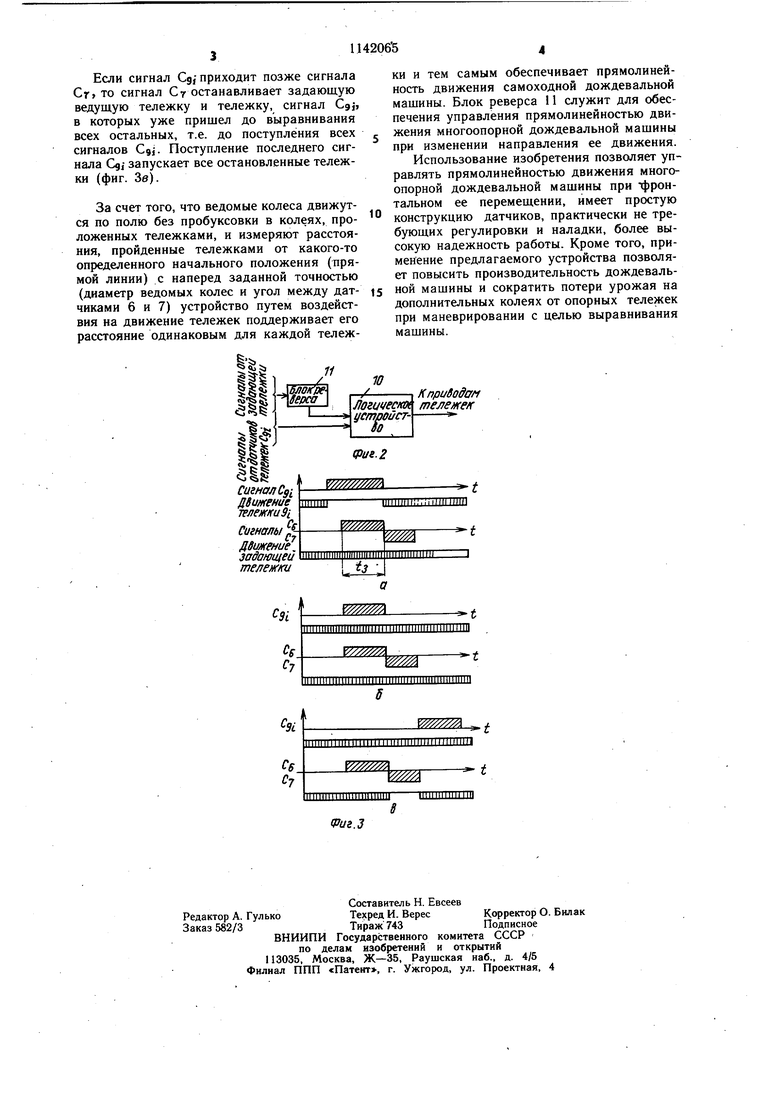
Изобретение относится к сельскому хозяйству, в частности к дождевательной технике, а именно к устройствам для управления движением многоопорных дождевальных машин. Известны устройства управления прямолинейностью движения многоопорных дожде вальных машин, содержащие датчики, peaгирующие на изменение взаимного расположения (изгиб или прогиб) смежных секций дождевальной машины, расположенных симметрично относительно ведуших тележек 1 . Однако изгибы смежных секций в районе ведущих тележек незначительные, поэтому необходимы очень чувствительные датчики, конструкции которых в условиях работы дождевальных машин ненадежны, не обладают достаточной чувствительностью. Наиболее близким к изобретению является устройство для управления прямолинейным движением многоопорной дождевальной машины, содержащее датчики угла рассогласования, преобразователь и выключатели приводов тележек 2. Недостатками этого устройства являются низкая надежность в работе и сложность конструкции. Цель изобретения - повышение надежности и упрощение конструкции. Цель достигается тем, что устройство для управления прямолинейным движением многоопорной дождевальной машины, содержащее датчики угла рассогласования, преобразователь и выключатели приводов тележек, снабжено шарнирно установленными на тележках ведомыми колесами, на которых закреплены датчики угла рассогласования, при, этом одно из ведомых колес является задающим и снабжено блоком реверса и вторым датчиком угла рассогласования, а все датчики соединены через преобразователь с выключателями приводов тележек При этом датчики угла рассогласования выполнены в виде постоянных магнитов и герметичных контактов, установленных соответственно на ведомых колесах и их подвесках, причем посередине между датчиками задающего кольца выполнена метка. На фиг. 1 приведена схема предлагаемого устройства; на фиг. 2 - блок-схема управления скоростью движения тележек; на фиг. 3 - диаграммы сигналов и движения. Устройство управления прямолинейным движением многоопорной дождевальной машины содержит (фиг. 1) задающее ведомое колесо 1, установленное при помощи подвески 2 на одной из ведущих тележек 3 дождевальной машины 4, ведомые колеса 5, установленные по одному при помощи подвесок 2 на остальных ведущих тележках дождевальной машины. Ведомые колеса 1 и 5 имеют одинаковый диаметр и расположены в колее соответствующей тележки. Задающее ведомое колесо 1 содинено с двумя датчиками рассогласования 6 и 7 (постоянные магниты, укрепленные на специальном диске ступицы колеса, и герметичный контакт, установленный на подвеске колеса, (не показаны) и имеет метку 8. Датчики 6 и 7 расположены симметрично относительно метки 8 под углами, которые определяются допустимым рассогласованием соосности хода тележек. На ведомых колесах 5 установлено по одному датчику 9. Датчики 9 соединены логическим устройством преобразователя 10 напрямую (фиг. 2), а датчики 6 и 7 через блок реверса 11. Логическое устройство связано с выключателями (не показаны) -приводов ведущих тележек. Устройство работает следующим образом. Перед началом движения дождевальной машины тележки 3 выставляются соосно продольной оси дождевальной машины. Ведомые колеса всех тележек выставляются таким образом (это выполняется путем их поднятия и вращения вручную) чтобы положение метки 8 задающего ведомого колеса 1 и датчиков 9 остальных колес совпадало по углу поворота относительно выбранной плоскости, проходящей через ось всех ведомых колес.. После этого производится запуск привода тележек дождевальной машины. При движении дождевальной мащины ведомые колеса всех тележек, двигаясь в колее основных колес тележек вращаются, на вход логического устройства преобразователя 10 поступают сигналы от датчиков 9 и через блок реверса от датчиков б и 7. Логическое устройство выдает сигналы на выключатели приводов в зависимости от последовательности прихода сигналов от датчиков. Диаграммы сигналов и движения могут быть следующими. Если сигналы от датчика 9 (сигнал Cgf ) приходит раньше сигнала датчика 6 (сигнал Cg), то логическое устройство выдает сигнал для остановки данной тележки (фиг. За). При поступлении сигналов от всех осталь-г ных тележек в промежуток времени tj (от сигнала Cs до сигнала Сг) поступление сигнала Су запускает остановленную ранее тележку. Происходит выравнивание прямолинейности движения многоопорной дождевальной мащины на каждом отдельном участке пути. Если сигналы от всех датчиков Сд приходят в отрезке времени t между поступлениями сигналов С6 и С7, то движение тележек не прекращается (фиг. 36).
Если сигнал Cg/ приходит позже сигнала Сг то сигнал С г останавливает задающую ведущую тележку н тележку, сигнал Cgj. в которых уже прищел до выравнивания всех остальных, т.е. до поступления всех сигналов Cgj. Поступление последнего сигнала Cgj запускает все остановленные тележки (фиг. Зв).
За счет того, что ведомые колеса движутся по полю без пробуксовки в колеях, проложенных тележками, и измеряют расстояния, пройденные тележками от какого-то определенного начального положения (прямой линии) с наперед заданной точностью (диаметр ведомых колес и угол между датчиками 6 и 7) устройство путем воздействия на движение тележек поддерживает его расстояние одинаковым для каждой тележ11
W
ки и тем самым обеспечивает прямолинейность движения самоходной дождевальной мащины. Блок реверса 11 служит для обеспечения управления прямолинейностью движения многоопорной дождевальной мащины при изменении направления ее движения. Использование изобретения позволяет управлять прямолинейностью движения многоопорной дождевальной мащины при тфронтальном ее перемещении, имеет простую конструкцию датчиков, практически не требующих регулировки и наладки, более высокую надежность работы. Кроме того, применение предлагаемого устройства позволяет повысить производительность дождевальной мащины и сократить потери урожая на дополнительных колеях от опорных тележек при маневрировании с целью выравнивания мащины.
Кприбо&ам тележек
fPui.2
t
щ
t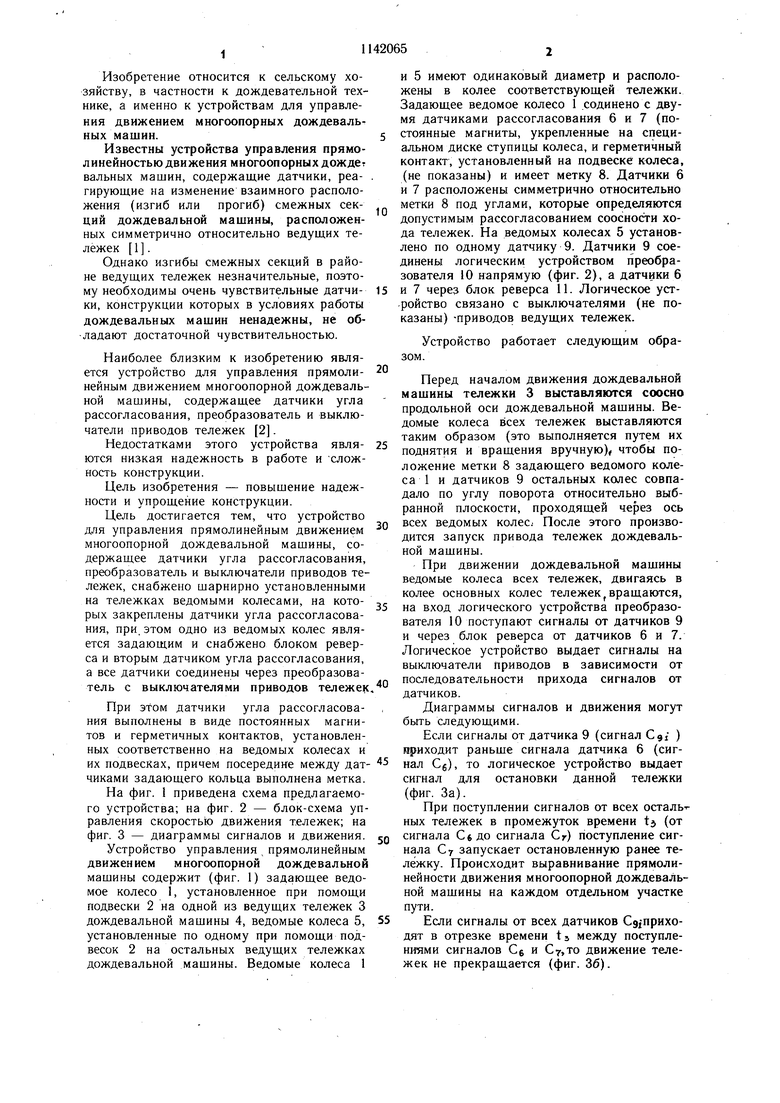
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОХОДНОЙ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ С СИСТЕМОЙ СИГНАЛИЗАЦИИ АВАРИЙНОЙ ОСТАНОВКИ | 2023 |
|
RU2804961C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ | 2011 |
|
RU2476067C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ТЕЛЕЖКИ МНОГООПОРНОЙ ФРОНТАЛЬНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 1990 |
|
RU2072770C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| Система управления концевыми тележками многоопорной дождевальной машины | 1982 |
|
SU1130274A1 |
| Фронтальная многоопорная дождевальная машина | 1987 |
|
SU1517855A1 |
| Устройство управления многоопорной фронтальной дождевальной машиной | 1987 |
|
SU1410917A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2009 |
|
RU2402199C1 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2018 |
|
RU2700385C1 |
| Устройство для синхронизации движения тележек многоопорной дождевальной машины | 1983 |
|
SU1117018A1 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРЯМОЛИНЕЙНЫМ ДВИЖЕНИЕМ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ, содержащее датчики угла рассогласования, преобразователь, выключатели приводов тележек, отличающееся тем, что, с целью повышения надежности и упрощения конструкции, устройство снабжено шарнирно установленными на тележках ведомыми колесами, на которых закреплены датчики угла рассогласования, при этом одно КЗ ведомых колес является задающим и снабжено блоком реверса и вторым датчиком угла рассогласования, a все датчики соединены через преобразователь с выключателями приводов тележек. 2. Устройство по п. 1, отличающееся тем, что датчики угла рассогласования выполнены в виде постоянных магнитов и герметичных контактов, установленных соответственно на ведомых колесах и их подвесках, при этом посередине между датчиками задающего колеса выполнена метка. (Л фиг. г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения порогового тока светодиода | 2023 |
|
RU2807500C1 |
| УСТАНОВКА ДЛЯ НЕПРЕРЫВНОГО СПИРТОВ ВИНОМАТЕРИАЛОВ | 0 |
|
SU239180A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3823730, кл | |||
| Способ приготовления строительного изолирующего материала | 1923 |
|
SU137A1 |
