калиброванного источника напряжения и 20 тить, что установившимся режимом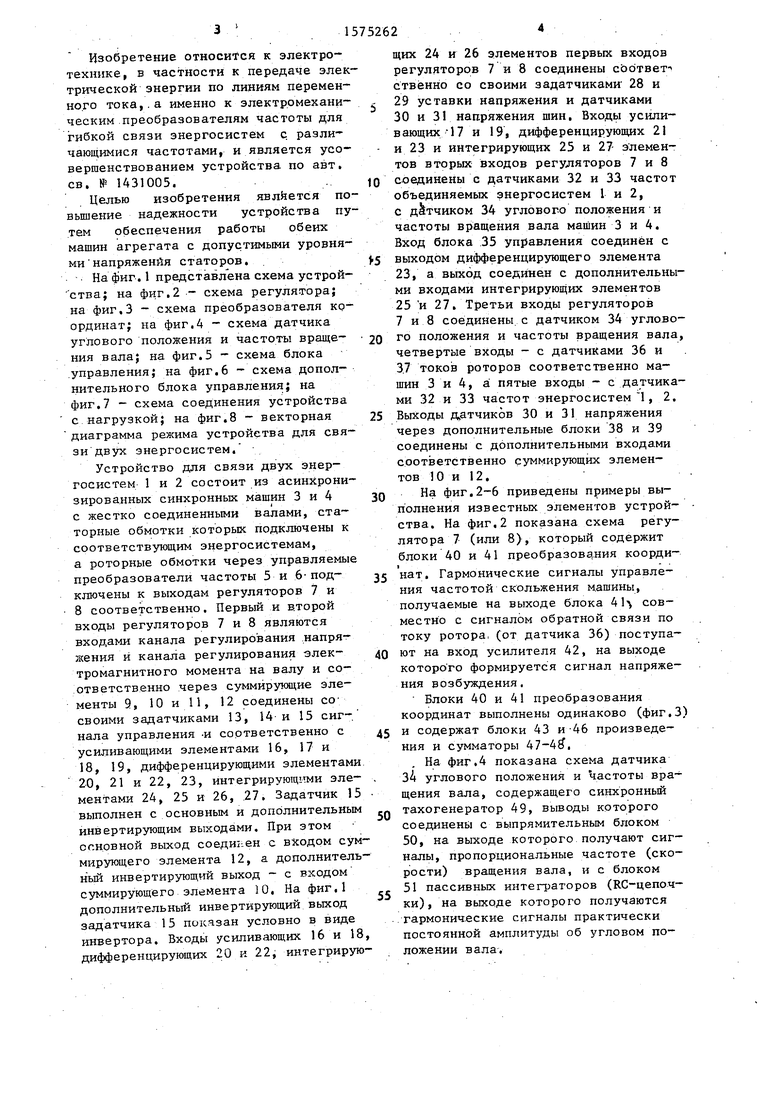
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1473002A1 |
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Устройство для связи двух энергосистем (его варианты) | 1984 |
|
SU1431005A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
| Устройство для управления возбуждением синхронного генератора в распределительной сети переменного тока | 2023 |
|
RU2802730C1 |

Изобретение относится к области электротехники, а более конкретно к электромеханическим преобразователям частоты для гибкой связи энергосистем с различающимися частотами. Целью изобретения является повышение надежности устройства путем обеспечения работы обеих машин агрегата с допустимыми уровнями напряжения статоров. Это достигается введением дополнительных блоков 38 и 39, входы которых подключены к датчикам напряжения 30 и 31, а выходы - к дополнительным входам суммирующих элементов 10 и 12. При превышении напряжением на входе дополнительного блока 38 (или 39) какого-то допустимого уровня данный блок формирует сигнал управления требуемой полярности, поступающий на вход суммирующего элемента 10 (или 12). Тем самым снижается значение ЭДС так, чтобы напряжение статора машины не превышало допустимого уровня, т.е. поставленная цель достигается. 8 ил.
регулируемого потенциометра, соединены с входами операционного регулятора 60, выход которого через диод 61
соединен с выходом блока 38. i
Операционный регулятор 60 в простейшем случае является пропорциональным регулятором, но может быть выполнен, например, в виде пропорционально-дифференциального регулятора. Диод 61 обеспечивает передачу сигнала лишь Одной полярности. При работе устройства элементы 16, 20, 24 и 18, 22, 26 обеспечивают пропорционально- интегрально-дифференциальное регулирование напряжения на статорах машин 3 и 4. Задатчик 15 сигнала управления обеспечивает задание на переток активной мощности через линию электропередачи с предлагаемым устройством. Элементы 17, 21, 25 и 19, 23, 27 реализуют пропорционально-интегрально- дифференциальное регулирование скорости (частоты) вращения вала агрегата, При этом задание (уставка) формируется по сигналам датчиков 32 и 33 как полусумма частот объединяемых энергосистем, что позволяет обеспечить наибольшее использование управ-, ляемых преобразователей 5 и 6, Выход
эадатчика 15 соединен с входом сумми- 50 линии или 3-фазном коротком замыка- рующего элемента 12, а через инвертор (на фиг.1 без номера) - с входом суммирующего элемента 10. Поэтому при работе устройства сигналы, поступающие на указанные входы суммирующих ее того, работала машина 3 до аварии элементов 10 и 12, имеют различные в двигательном или генераторном режи- знаки и этим определяют, что одна ма- ме.При разгоне или«торможении продиф- шина агрегата работает генератором, ференцированньш в элементе 23 рач- а другая - двигателем. Величина этих ностный сигнал между уставкой и ш нии, приводящих к тому, что электромагнитный момент машины 4 падает до нуля, агрегат начинает разгоняться или тормозиться в зависимости от
для электрических машин считается режим с отклонением от задания на 3%, поэтому в устройстве мо ю отказаться от регулирования по актив-
5 ной мощности. В свою очередь, это позволяет идентифицировать регуляторы машин устройства, что имеет эксплуатационное преимущество, и повысить устойчивость. Повышение устои
0 чивости достигается благодаря тому, что обе машины управляются по скольжению. Поэтому, например, при коротких замыканиях и отключениях линий связи с энергосистемой отпадает необходимость перестройки структуры регулятора оставшейся в работе машины агрегата. При этом если возмущение большое и при заданной оптимальной настройке коэффициентов регулирования усиливающих, дифференцирующих
0
и интегрирующих элементов скорость
машин может выйти за допустимый диапазон, в действие вступает дополнительное регулирование с помощью 5 блока 35 управления, который по оценке значения производной скольжения выявляет указанное большое возмущение. При больших возмущениях з энергосистеме 2, например, отключениях
5
линии или 3-фазном коротком замыка- того, работала машина 3 до аварии в двигательном или генераторном режи- ме.При разгоне или«торможении продиф- ференцированньш в элементе 23 рач- ностный сигнал между уставкой и ш нии, приводящих к тому, что электромагнитный момент машины 4 падает до нуля, агрегат начинает разгоняться или тормозиться в зависимости от
тинной скоростью вращения вала (т.е.
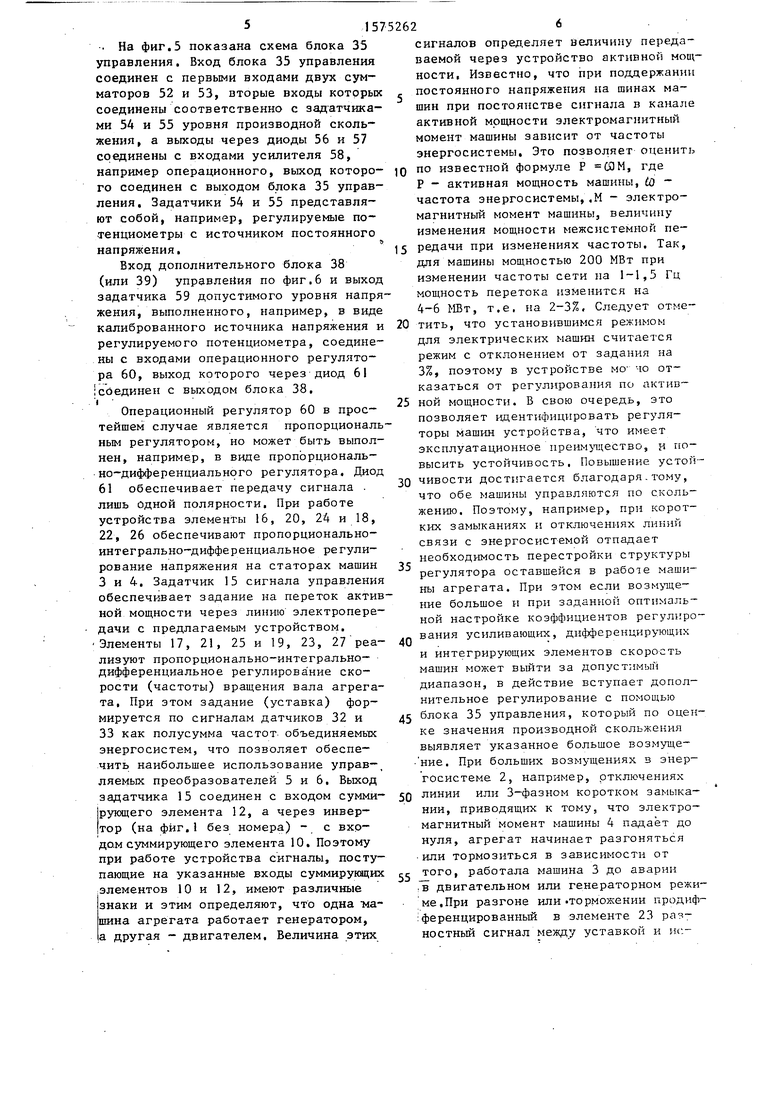
/сигнал производной скольжения) посту пает (фиг.5) на сумматоры 52 и 53, работающие в компараторном режиме. При этом если этот сигнал больше значения, определяемого задатчиками уровня производной скольжения 54 и 55, на выходе одного из сумматоров 52 и 53 вырабатывается сигнал заданной амплитуды и полярности. Этот сигнал через диод (например, 56) и усилитель 58, служащий для усиления сигнала и развязки выходов сумматоров 52 и 53-, поступает на интеграторы 25 и 27, которые интегрируют этот сигнал большой амплитуды и тормозят машину .3. Как только производная скольжения войдет в диапазон, определяемый задатчиками 54 и 55, сигнал ,с выхода сумматора 58 исчезнет и устройство восстановит режим агрегата по скольжению. При этом, как указывалось выше, устойчивость агрегата сохраняется благодаря пропор- ционально-интегрально-дифференциаль- ному регулированию элементами 17, 21 и 25. Как только устранится (после успешного АПБ) возмущение и линия электропередачи восстановится, асинхронизированные синхронные машины реализуют пропорционально-интегрально-дифференциальное регулирование по скольжению совместно с дополнительным управляющим сигналом большой амплитуды от блока 35 управления. Это позволяет устройству войти в нормальный по нагрузке режим, не выходя за диапазон скольжения, существенно быстрее, чем без блока 35 управления. Достигается это, как отмечалось выше, тем, что при коротких замыканиях или отключениях линии электропередачи производная скольжения меняется сразу же, поэтому блок 35 управления свой дополнительный управляющий сигнал формирует сразу же в начале возмущения, а не через какое-то время, как в устройстве без блока 35. На фиг.1 задатчик 15 сигнала управления показан выполненным общим с прямым и инвертирующим выходами, но каждая машина может иметь свой задатчик сигнала управления. Задатчики 13, 14 и 15 сигналов управления выполнены, например, как источники калиброванного напряжения с последовательно соединенными регулируемыми потенциометрами.
10
15
20
25
45
50
55
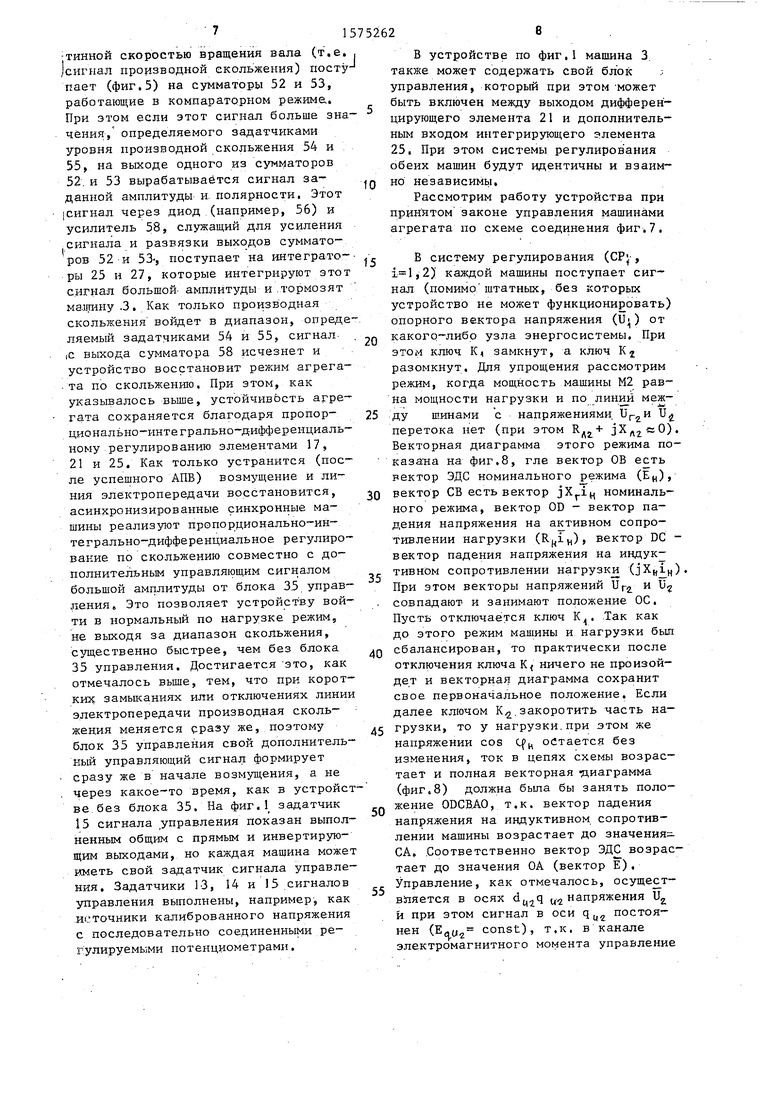
В устройстве по фиг.1 машина 3 также может содержать свой блок управления, который при этом может быть включен между выходом дифференцирующего элемента 21 и дополнительным входом интегрирующего элемента 25. При этом системы регулирования обеих машин будут идентичны и взаимно независимы.
Рассмотрим работу устройства при принятом законе управления машинами агрегата по схеме соединения фиг.7.
В систему регулирования (СР- , ,2) каждой машины поступает сигнал (помимо штатных, без которых устройство не может функционировать) опорного вектора напряжения (U ) от какого-либо узла энергосистемы. При этом ключ К, замкнут, а ключ К2 разомкнут. Для упрощения рассмотрим режим, когда мощность машины М2 равна мощности нагрузки и по линий между шинами с напряжениями иГ2и U
перетока нет (при этом
RA +
jXrt,«0).
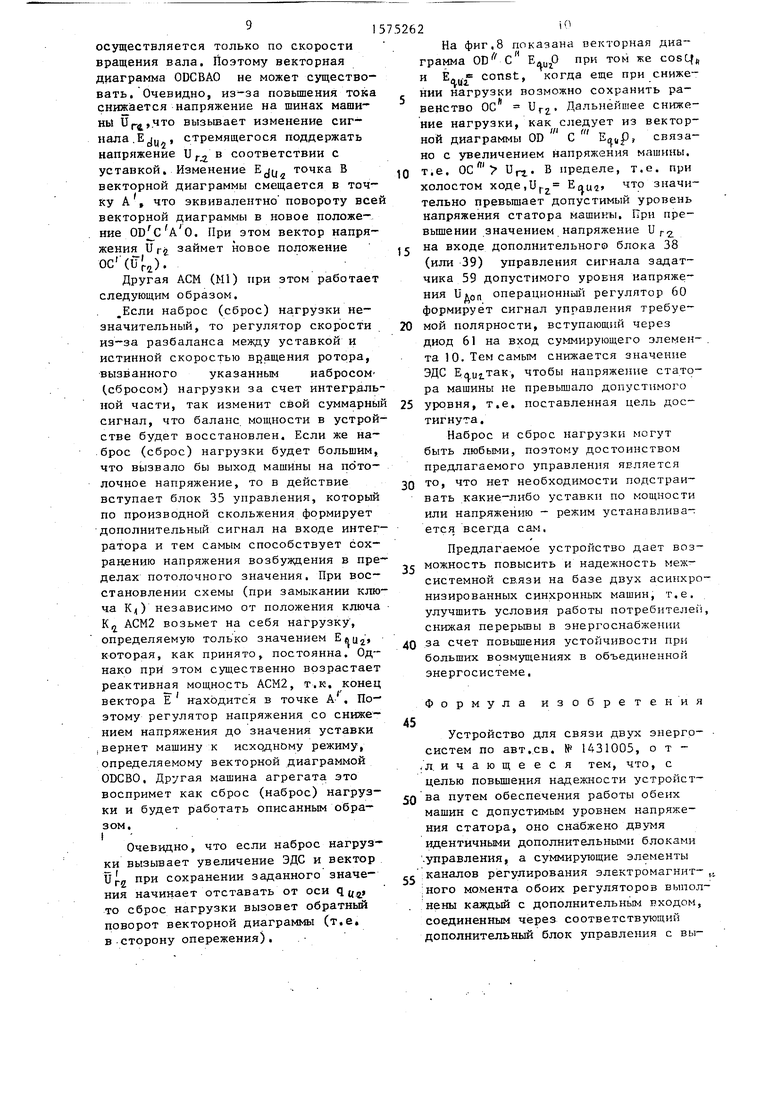
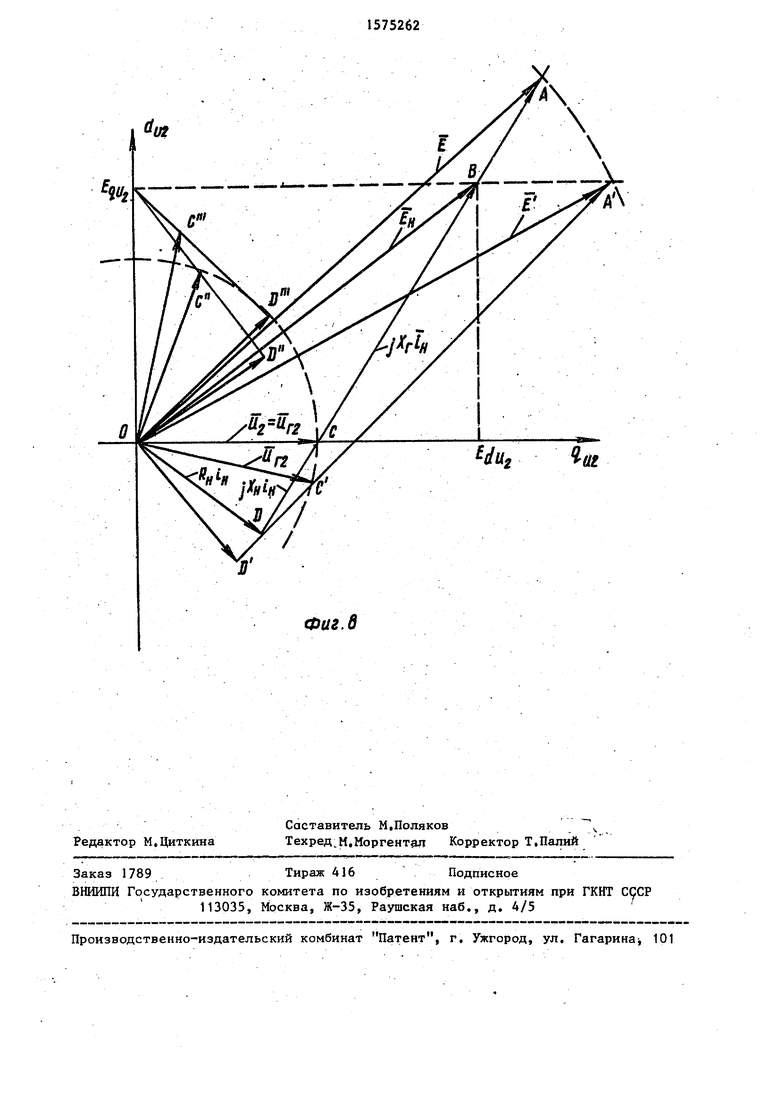
Векторная диаграмма этого режима показана на фиг.8, гле вектор 0В есть ректор ЭДС номинального режима (Ен),
30 вектор СВ есть вектор jXriH номинального режима, вектор OD - вектор падения напряжения на активном сопротивлении нагрузки (R,iH), вектор DC - вектор падения напряжения на индук-
,,. тивном сопротивлении нагрузки (jXHiH). При этом векторы напряжений игг и Ъ совпадают и занимают положение ОС. Пусть отключается ключ К. Так как до этого режим машины и нагрузки был
4Q сбалансирован, то практически после отключения ключа К{ ничего не произойдет и векторная диаграмма сохранит свое первоначальное положение. Если далее ключом К,, закоротить часть нагрузки, то у нагрузки при этом же напряжении cos остается без изменения, ток в цепях схемы возрастает и полная векторная -диаграмма (фиг.8) должна была бы занять положение ODCBAO, т.к. вектор падения напряжения на индуктивном сопротивлении машины возрастает до значения- СА. Соответственно вектор ЭДС возрастает до значения ОА (вектор Е). Управление, как отмечалось, осуществляется в осях U2напряжения U2 и при этом сигнал в оси qU2 постоянен (Еду const), т.к. в канале электромагнитного момента управление
у1
осуществляется только по скорости вращения вала. Поэтому векторная диаграмма ODCBAO не может существовать. Очевидно, из-за повышения тока снижается напряжение на шинах машины 11Г4,что вызывает изменение сигнала Ejy , стремящегося поддержать напряжение Uгл в соответствии с уставкой. Изменение EJJ. точка В векторной диаграммы смещается в точку А , что эквивалентно повороту все векторной диаграммы в новое положение OD C A O. При этом вектор напряжения Urg займет новое положение
ос (й).
Другая ACM (Ml) при этом работает следующим образом.
Если наброс (сброс) нагрузки незначительный, то регулятор скорости из-за разбаланса между уставкой и истинной скоростью вращения ротора, вызванного указанным набросом (сбросом) нагрузки за счет интегральной части, так изменит свой суммарны сигнал, что баланс мощности в устройстве будет восстановлен. Если же наброс (сброс) нагрузки будет большим, что вызвало бы выход машины на потолочное напряжение, то в действие вступает блок 35 управления, который по производной скольжения формирует дополнительный сигнал на входе интегратора и тем самым способствует сохранению напряжения возбуждения в пределах потолочного значения. При восстановлении схемы (при замыкании ключа Кд) независимо от положения ключа К АСМ2 возьмет на себя нагрузку, определяемую только значением , которая, как принято, постоянна. Однако при этом существенно возрастает реактивная мощность АСМ2, т.к. конец вектора Е находится в точке А, Поэтому регулятор напряжения со снижением напряжения до значения уставки вернет машину к исходному режиму, определяемому векторной диаграммой ODCBO. Другая машина агрегата это воспримет как сброс (наброс) нагрузки и будет работать описанным образом,
I
Очевидно, что если наброс нагрузки вызывает увеличение ЭДС и вектор Ur2 при сохранении заданного значения начинает отставать от оси q цу то сброс нагрузки вызовет обратный поворот векторной диаграммы (т.е. в сторону опережения),
2|П
На фиг.8 покачана векторная диаграмма С ЕлЦгО при том же cosCJn и Еа const, когда еще при снижении нагрузки возможно сохранить равенство ОС игг Дальнейшее снижение нагрузки, как следует из векторной диаграммы OD С , связано с увеличением напряжения машины.
т.е. U. В пределе, т.е. при холостом ходе,иг EoU2, что значительно превышает допустимый уровень напряжения статора машины. При превышении значением напряжение UГ2
на входе дополнительного блока 38 (или 39) управления сигнала задат- чика 59 допустимого уровня напряжения идоп операционный регулятор 60 формирует сигнал управления требуемой полярности, вступающий через
диод 61 на вход суммирующего элемента 10. Тем самым снижается значение ЭДС Еаит.так, чтобы напряжение статора машины не превышало допустимого
уровня, т.е. поставленная цель достигнута.
Наброс и сброс нагрузки могут быть любыми, поэтому достоинством предлагаемого управления является
то, что нет необходимости подстраивать какие-либо уставки по мощности или напряжению - режим устанавливается всегда сам.
Предлагаемое устройство дает воз- можность повысить и надежность межсистемной связи на базе двух асинхро- низированных синхронных машин, т.е. улучшить условия работы потребителей, снижая перерывы в энергоснабжении за счет повышения устойчивости при больших возмущениях в объединенной энергосистеме.
Формула изобретения
45
Устройство для связи двух энергосистем по авт.св. № 1431005, о т - .личающееся тем, что, с целью повышения надежности устройство ва путем обеспечения работы обеих машин с допустимым уровнем напряжения статора, оно снабжено двумя идентичными дополнительными блоками .управления, а суммирующие элементы
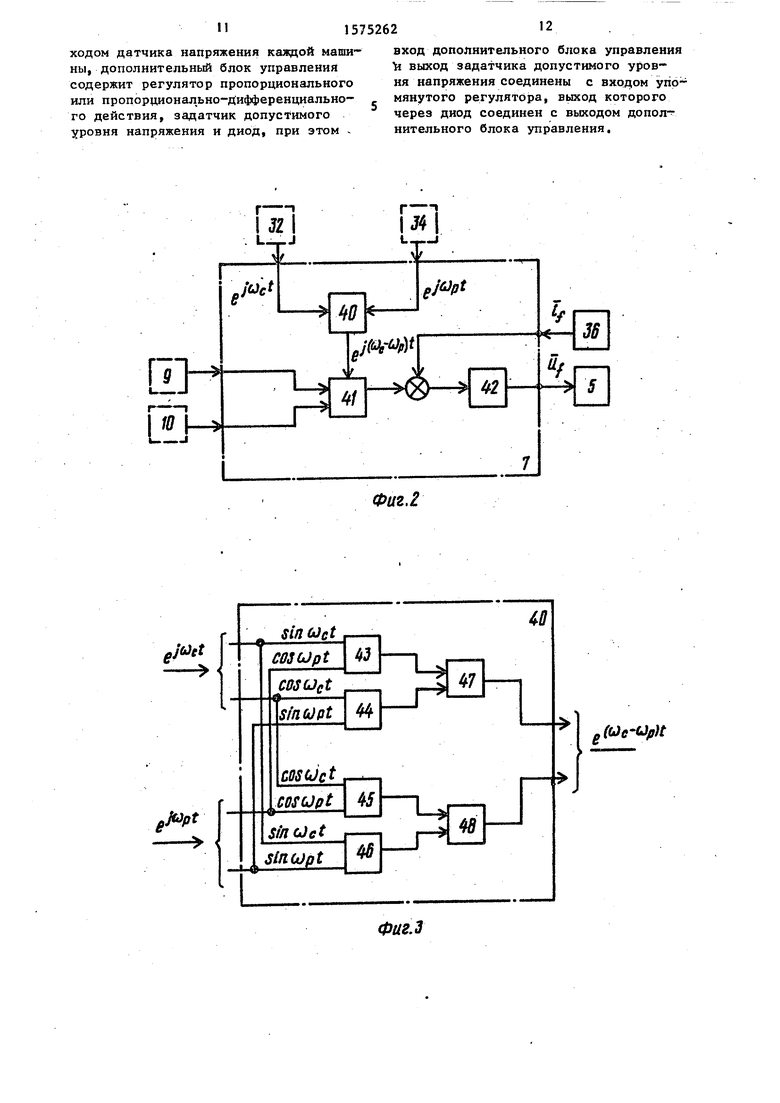
каналов регулирования электромагнит- ,, ного момента обоих регуляторов выполнены каждый с дополнительным РХОДОМ, соединенным через соответствующий дополнительный блок управления с выходом датчика напряжения каждой машины, дополнительный блок управления содержит регулятор пропорционального или пропорционально-дифференциального действия, задатчик допустимого уровня напряжения и диод, при этом ,jb)et
9&pt
вход дополнительного блока управления и выход задатчика допустимого уровня напряжения соединены с входом упомянутого регулятора, выход которого через диод соединен с выходом дополнительного блока управления.
Фиг.2
e(b)c-UpK
Фиг.З
I
I1/.. jr -J
Фие.7
Фа г. в
(It
| Устройство для связи двух энергосистем (его варианты) | 1984 |
|
SU1431005A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
