Изобретение относится к переносным инструментам с приводом для завинчивания или развинчивания болтов или гаек. Известен гайковерт, содержащий корпус, размещенные в нем полый вал маховик, обгонную муфту, привод, ки нематически связанный с полым валом, соединенный с последним шпиндель с гаечной головкой и механизм . управления обгонной муфтой ij . Указанньй гайковерт характеризуется недостаточньм крутящим момен-/ том, что не позволяет использовать его для отвинчивания тугозатянутых гаек. Наиболее близким к изобретению является инерционный гайковерт, содержа11ий корпус, размещенный в нем полый вал, в котором установлен при водной вал, маховики, шпиндель с га ечной головкой, закрепленный на кор лусе привод, соединенную с ним кинематическую связь, отключатель ее и обгоннуй муфту, внутренняя обойма которой жестко связана со шпинделем а наружная - с приводным валом 2j . Недостат.ки известного гайковерта знач ительные габариты и сложность конструкции. Цель изобретения - уменьшение га баритов и упрощение конструкции. Поставленная цель достигается тем, что в инерционном гайковерте, содержащем корпус, размещенный в не полый вал, в котором установлен при водной вал, маховики, шпиндель с гаечной головкой, закрепленный на корпусе привод, соединенную с ним кинематическую связь, отключатель е и обгонную муфту, внутренняя обойма которой жестко связана со шпинделем, а наружная - с .приводным валом привод выполнен в.виде соединенных кинематической связью с полвым валом пары рукояток, одна из которых установлена на корпусе с возможностью поворота вокруг его оси, отключатель размещен в рукоятках, полый вал установлен с возможностью поворота вокруг оси и подпружинен вокружном направлении, маховики закреплены на полом валу и один из них имеет кулачки, а на наружной обойме вьтолнены кулачки, взаимодей ствующие с кулачками маховика. Кроме того, с целью сокращения времени холостого хода, инерционный гайковерт снабжен сменными маховиками, установленными на шпинделе. Причем, с целью повышения производительности, гайковерт снабжен ускоряющей двухступенчатой цилиндрической зубчатой передачей, соединенной с кинематической связью. На фиг. 1 схематически изображен инерционный гайковерт, общий вид; на фиг.2 - разрез А-А на фиг.1, на фиг.З - ускоряющая зубчатая передача. Инерционный гайковерт содержит цилиндрической формы корпус 1, размещенньй в нем полый вал 2, в котором установлен приводной вал 3, маховики 4-и 3, жестко закрепленные на полом валу 2. Шпиндель 6 со сменной гаечной головкой7 своим фланцем 8, который является звездочкой встроейной обгонной муфты 9, поворотно закреплен на цилиндрическом пальце 10 приводного вала 3. Другой щпиндель 11 неподвижно закреплен на резьбовом конце 12 приводного вала 3. Однако закрепление шпинделя 11 на приводном валу 3 возможно так же, как и шпинделя 6, т.е. с помощью встроенной обгонной муфты. Расположение шпинделей 6 и 11 позволяет как завинчивать, так и отвинчивать болт 13 при одном направлении вращения полого вала 2 за счет поворота на 180° всего гайковерта. Наружная обойма 14 обгонной муфты 9 выполнена на приводном валу 3. и имеет кулачки 15, контактирующие с ответными кулачками 16, выполнен-, ными на маховике 4. Рукоятки 17 и 18, являющиеся приводом, установлены на корпусе 1, причем рукоятка 17закреплена на нем неподвижно,а рукоятка 18 - поворотно с возможностью поворота вокруг его оси. Пружина 19 возвращает рукоятку 18в исходное положение. В центральной чисти полого вала 2 выполнено храповое колесо 20, которое на шариковых опорах 21 установлено в корпусе 1 и зафиксировано в нем гайкой 22. Полый вал 2 установлен в корпусе 1 с возможностью поворота вокруг оси и подпружинен в окружном направлении относительно него, например, с помощью цилиндрической пружины 23 кручения, являющейся сило- , вым элементом. Угол noFJopoTa полого вала 2 огра ничен выполненньпч в нем и в гайке 22 секторНЕ.м пазом 24 (угол сектора 60 - 120 ), в котором размещен палец 25, ввернутый в приводной вал 3, Пружина 26 кручения обеспечивает возвращение приводного вала 3 в исходное положение после его рабочего поворота вместе с наружной обоймой 14, В рукоятки 17 и 18 врезаны подпружиненные храповые собачки 27 и 28. , Храповое колесо 20 и контактирующие с ним храповые собачки 27 и 28 представляют собой кинематическую связь, соединяющую рукоятки 17 и 18 с полым,валом 2. В тело рукояток 17 и 18 врезаны также подпружиненные втулки 29 и 30, имеющие возможность рсевого перемещения, при котором они осуществляют вывод из зацепления с храповым колесом 20 собачек 27 и 28, т.е. кинематической связи рукояток 17 и 18 с полым валом 2. Во втулки 29 и 30 установлены винты 31 И;32, а втулка 29 снабжена контргайкой 33, которая ре гулирует ее осевое положение. Сменная гаечная головка 7 может быть установлена, при необходимости, в шпинделе 6 или в шпинделе 11. Ограничительный штифт 34, взаимодейству с корпусом 1, обеспечивает предвари тельное угловое поджатие пружины 23 Инерционный гайковерт может быть снабжен сменными маховиками 35, установленными, например, на шпинделе 6, и ускоряющей двухступенчатой цилиндрической передачей 36 (см. фиг. установленной, на оси 37, закрепленной в корпусе 1 и в кронштейне 38, расположенном на полом валу-2, последний в данном случае выполнен раздельно с храповым колесом 20. Пр этом полый,вал 2 имеет зубчатое колесо 39, В341имодействующее с зубчатым колесом 40 двухступенчатой пере дачи 36, второе зубчатое колесо 41 которой взаимодействует с зубчатым колесом 42, выполненным на храповом колесе 20. Инерционный гайковерт работает следующим образом. В исходном положении рукоятки 17 и 18 под действием пружины 19 находятся в разпеденном положени1т с упором собачки 28 в стенку секто ного паза 43, выполненного под нее в корпусе 1 . Иодпрл.ткиненные собач16 ки 27 и 28 поджаты к зубьям храпового колеса 20. Втулки 29 и 30 находят ся в положении, обеспечивающем-включенное состояние собачек 27 и 28. Расстояние между тор-цами винтов 31 и 32 устанавливается из условия получения необходимой величины закручивания силовой пружины 23. Полый вал 2 с маховиками 4 и 5 под действием пружины 23 предварительно подпружг нен к корпусу 1 благодаря штифту 34 и упору под него в корпусе 1. Наружная обойма 14 обгонной муфты 9 под действием пружины 26 через палец 25 своими кулачками 15 поджата к ответным кулачкам 16 маховика 4 (см. фиг.2)., Поворот рукоятки 18 вызывает поворот полого вала 2 с маховиками 4 и 5 и закручивание силовой пружины 23. При этом собачка 27 проскальзывает по храповому колесу 20. В конце поворота рукоятки 18 войдут в соприкосновение винты 31 и 32 и начнут перемещать втулки 29 и 30, которые поочередно отключают собачки 28 и 27, После этого Полый вал 2 с маховиками 4 и 5 под действием пружины 23 начнет поворачиваться и, разгоняясь, ударит кулачками 16 маховика 4 по кулачкам. 15 наружной обоймы 14, связанной с приводным валом 3. Обгонная муфта 9 передаст ударный импульс через шпиндель 6 и гаечную головку 7 на заворачиваемый болт 13. Под действием пружины 19 рукоятка 18 верйется в исходное положение. При повторном повороте рукоятки18 цикл работы-гайковерта повторяется и перед каждым последующим циклом работы приводной вал 3 поворачивается вместе с обоймой 14 на некоторый угол относительно шпинделя 6 с гаечной головкой 7, обеспечивая ее дальнейший поворот. При работе гайковерта в режиме отвинчивания со шпинделем 11 (при отсутствии обгонной муфты) необходимый угловой зазор между кулачками 15 и 16 в начале каждого нового цикла обеспечивается поворотом всего гайковерта за рукоятки 17 и 18 Изменение работы гайковерта - на завинчивание или отвинчивание - производится его поворотом на 180 относительио оси рукояток 17 и 18, т.е. при завинчивании необходимо I пользоваться шпинделем 6, а при отвинчивании - шпинделем 11. При холостом (ненагруженном) вра щении болта 13 можно пользоваться сменными маховиками 35. В этом случае в конце рабочего поворота полого вала 2 с маховиками 4 и 5 после упора штифта 34 маховика 4 в корпус 1 маховик 35 вместе со шпинделем 6 будет вращаться по инерции в преж нем направлении благодаря наличию обгонной муфты 9. При использовании двухступенчатой цилиндрической зубчатой переда6чи 36 увеличивается величина закручивания пружины 23 при одном повороте рукоятки 18.-. Изменение усилия удара маховика 4 и 5 обеспечивается изменением угла закручивания пружины 23, изменением расстояния между винтами 31 и 32, а также осевьм перемещением втулки 29 с помощью контргайки 33. Данный инерционный гайковерт компактен, прост по конструкции, не требует машинных источников энергии и способен развивать значительный крутящий момент.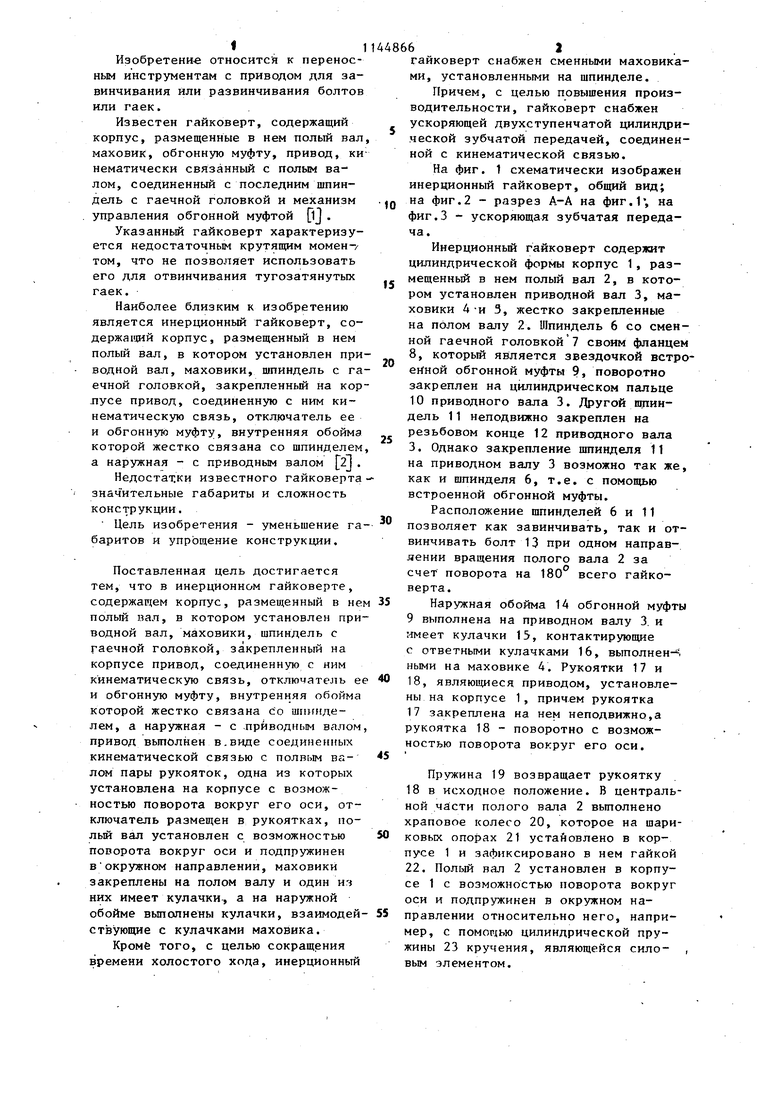


| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444430C1 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2005 |
|
RU2288834C1 |
| Гайковерт для крупных резьбовыхСОЕдиНЕНий | 1979 |
|
SU814706A1 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2151323C1 |
| ИНЕРЦИОННЫЙ ГАЙКОВЕРТ | 2013 |
|
RU2535835C2 |
| Гайковерт | 1981 |
|
SU977145A1 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2153099C1 |
| ВИБРАЦИОННЫЙ ГАЙКОВЕРТ | 1994 |
|
RU2081741C1 |
| Электрический вибрационный гайковерт | 1981 |
|
SU1004091A2 |
| Гайковерт | 1980 |
|
SU931454A1 |


1. ИНЕРЦИОННЫЙ ГАЙКОВЕРТ, содержащий корпус, размещенный в нем полый вал, в котором установлен приводной вал,маховики,шпиндель с гаечной головкой, закрепленной на корпусе привод, соединенную с ним- кинематическую связь, отключатель ее и обгонную муфту, внутренняя обойма которой жестко связана со шпинделем, а наружная - с. приводным валсЙ, отличаюрдийся тем, что, с целью уменьшения габаритов и упрощения конструкции, привод выполнен в виде соединенных кинематической связью с полым валом пары рукояток, одна из которых установлена на корпусе с возможностью поворота вокруг его оси, отключатель размещен в рукоятках, полый вал установлен с возможностью поворота вокруг оси и подпружинен в окружном направлении, маховики закреплены на полом валу и один из них имеет кулачки, а на наружной обойме выполнены кулачки, взаимодействующие с кулачками маховика. 2.Гайковерт по п.1, отличают и и с я .тем, что, с целью сокращения времени холостого хода, он снабжен сменными маховиками, установленными на шпинделе . СП 3.Гайковерт по пп 1 и 2, отличающийся тем, что, с целью повьпиения производительности, он снабжен ускоряющей двухступенчатой цилиндрической зубчатой передачей, соединенной с кинематической связью. 1 30 9 а
it
Фиг f
/4
/6
/5
40
42
Фиг 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU270614A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электрический инерционный гайковерт | 1974 |
|
SU539756A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
