нирно укреплен в корпусе механизма поворота рукоятей.
6, Устройство по пп. 1 и 2, отличающеес.я тем, что механизм вращения каждой рукояти вокруг своей продольной оси выполнен в виде
гидромотора и червячной передачи, установленных соотв-етственно на каждом зубчатом секторе механизма поворота рукоятей, а каждая рукоятьсоответственно установлена на выходном валу червячной передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование гидравлического экскаватора | 1979 |
|
SU863780A1 |
| РАБОЧЕЕ ОРУДИЕ | 1991 |
|
RU2046885C1 |
| Рабочее оборудование гидравлического одноковщового экскаватора | 1975 |
|
SU653345A1 |
| СЪЕМНЫЙ УЗЕЛ ПРИЖИМНОГО ЭЛЕМЕНТА И МЕХАНИЗМ ОБРАТНОЙ ЛОПАТЫ С ТАКИМ УЗЛОМ | 2010 |
|
RU2594398C2 |
| СПОСОБ ЭКСКАВАЦИИ ГРУНТА ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032029C1 |
| РАБОЧАЯ МАШИНА-МАНИПУЛЯТОР И СПОСОБ ФУНКЦИОНИРОВАНИЯ РАБОЧЕЙ МАШИНЫ-МАНИПУЛЯТОРА | 2008 |
|
RU2466240C2 |
| Устройство для выполнения земляных работ | 1985 |
|
SU1328436A1 |
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1717733A1 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ | 1965 |
|
SU171809A1 |
| Рабочее оборудование одноковшового гидравлического экскаватора конструкции даниленко н.д. и мещерякова а.ф. | 1976 |
|
SU673705A1 |
1. УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ЗЕМЛЯНЫХ И ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТ, включающее установленную на самоходном шасси поворотную платформу, стрелу и две рукояти с рабочими органами, поворотные вокруг, продольной оси и в плоскости, проходящей через их продольные оси, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено промежуточным звеном, шарнирно связанным со стрелой с возможностью поворота в плосЛости подъема стрелы, а рукояти установлены на промежуточном звене с возможностью вращения вокруг его продольной оси и возвратно-поступательного перемещения вдоль его продольной оси. 2. Устройство по п. 1, о т л ичающееся тем, что промежуточное звено выполнено в виде кожуха с установленным в нем с возможностью возвратно-поступательного перемещения вдоль его продольной оси полым элементом, и корпуса механизма поворота рукоятей в плоскости, проходящей через их продольные оси, уста.новленного с возможностью вращения внутри полого элемента, причем механизм поворота рукоятей в плоскости, проходящей через их продольные оси, выполнен в виде зубчатой передачи, звенья которой выполнены в виде зубчатых секторов, на которых установлены рукояти, и привода. 3.З стройство по пп. 1 и 2, о тличающееся тем, что мехаi низм возвратно-поступательного переW мещения рукоятей вдоль продольной оси промежуточного звена выполнен в виде гНДРоцилиндра, шток которого соединен с полым элементом, а корпус закреплен на кожух.з промежуточного звена. 4.Устройство по пп. 1 и 2, отличающееся тем, что механизм вращения рукоятей вокруг про дольной оси промежуточного звена выСП полнен в виде гидромотора, установО ленного на полом элементе, и червячдэ ной передачи, червячное колесо которой установлено на корпусе механизма поворота рукоятей в плоскости, проходящей через их продольные оси. 5.Устройство по пп. 1 и 2, отличающееся тем, что привод поворота рукоятей в плоскости, проходящей через их продольные оси, выполнен в виде гидроцилиндра, шток которого шарнирно соединен с одним из зубчатых секторов, а корпус шар
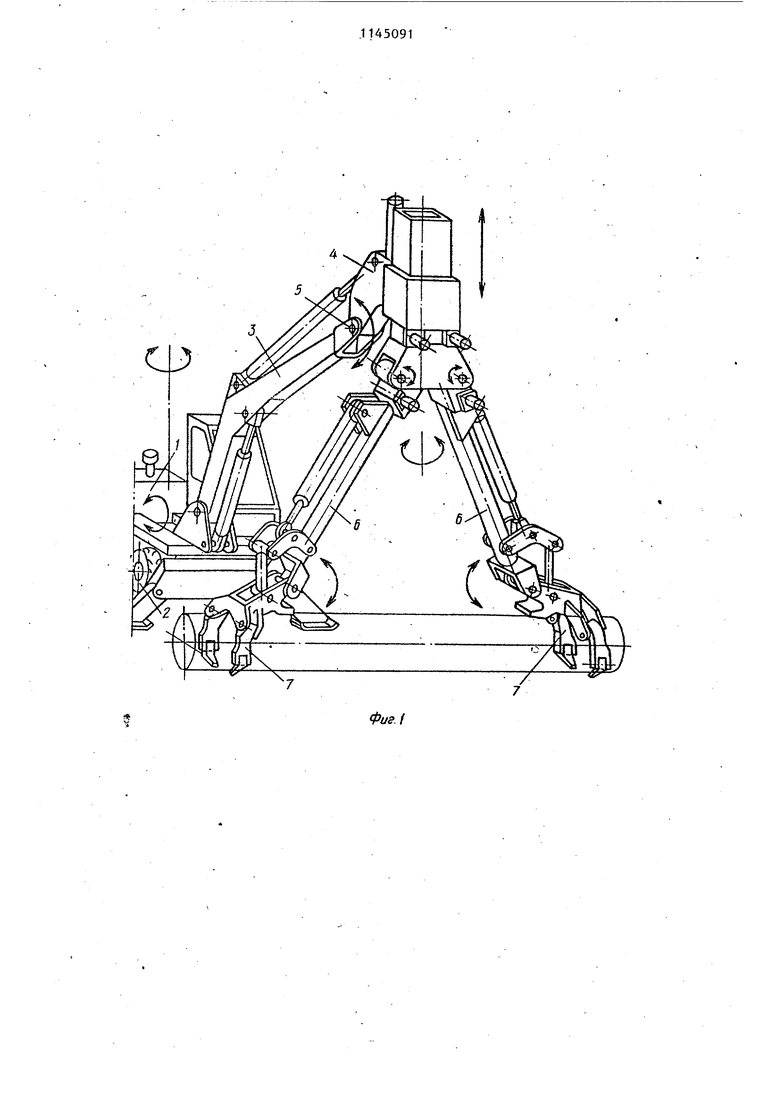
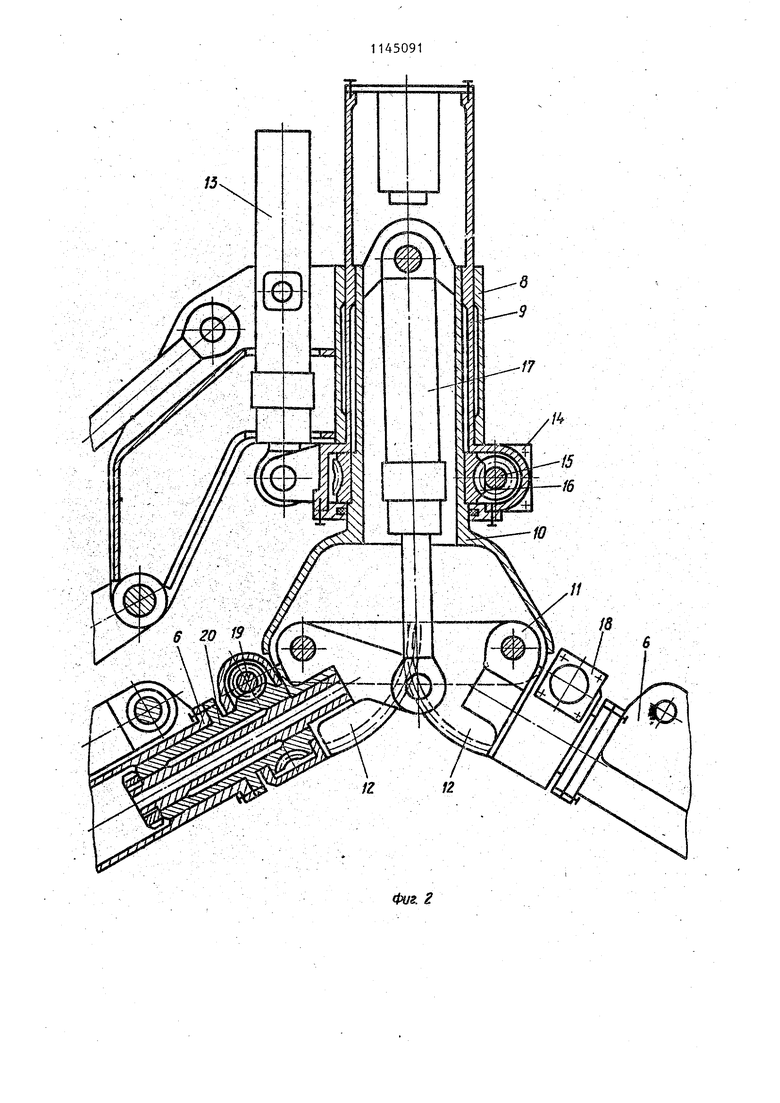
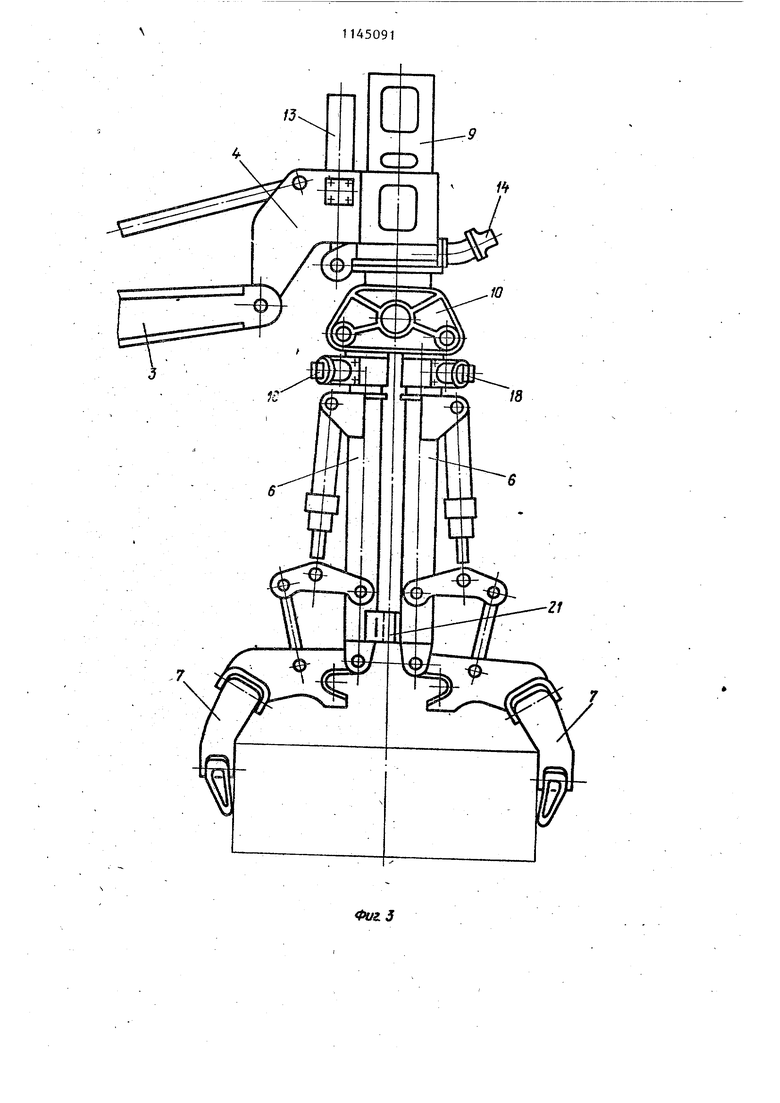
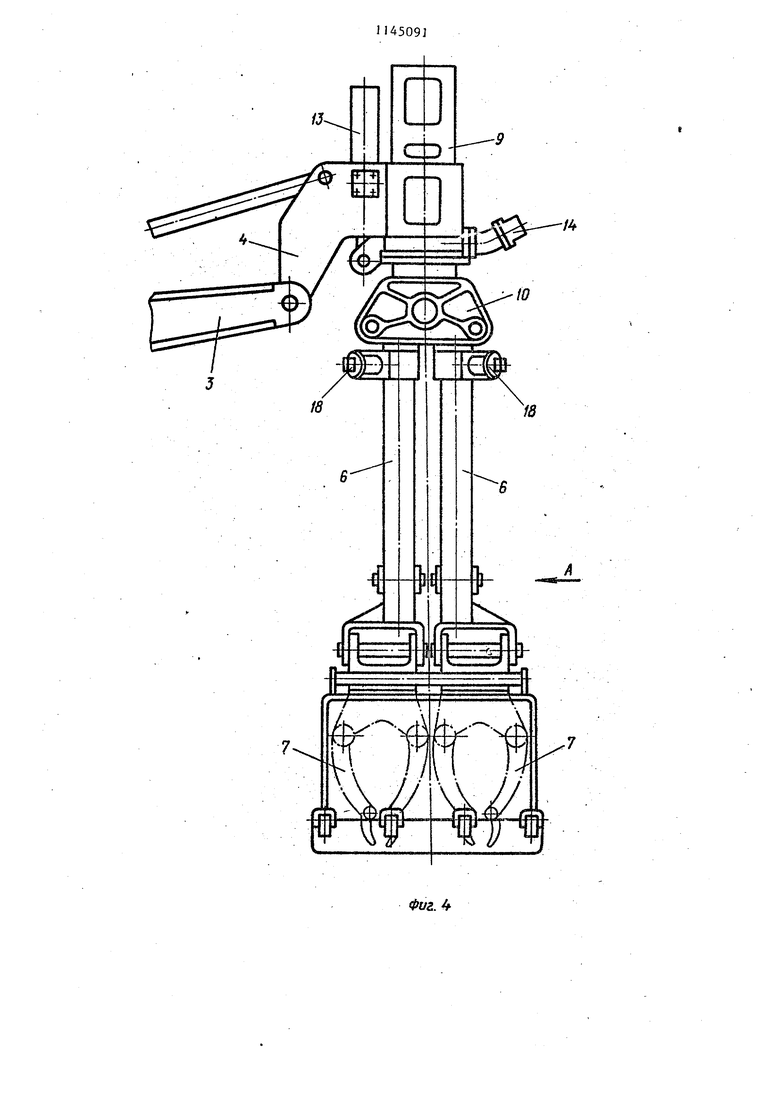
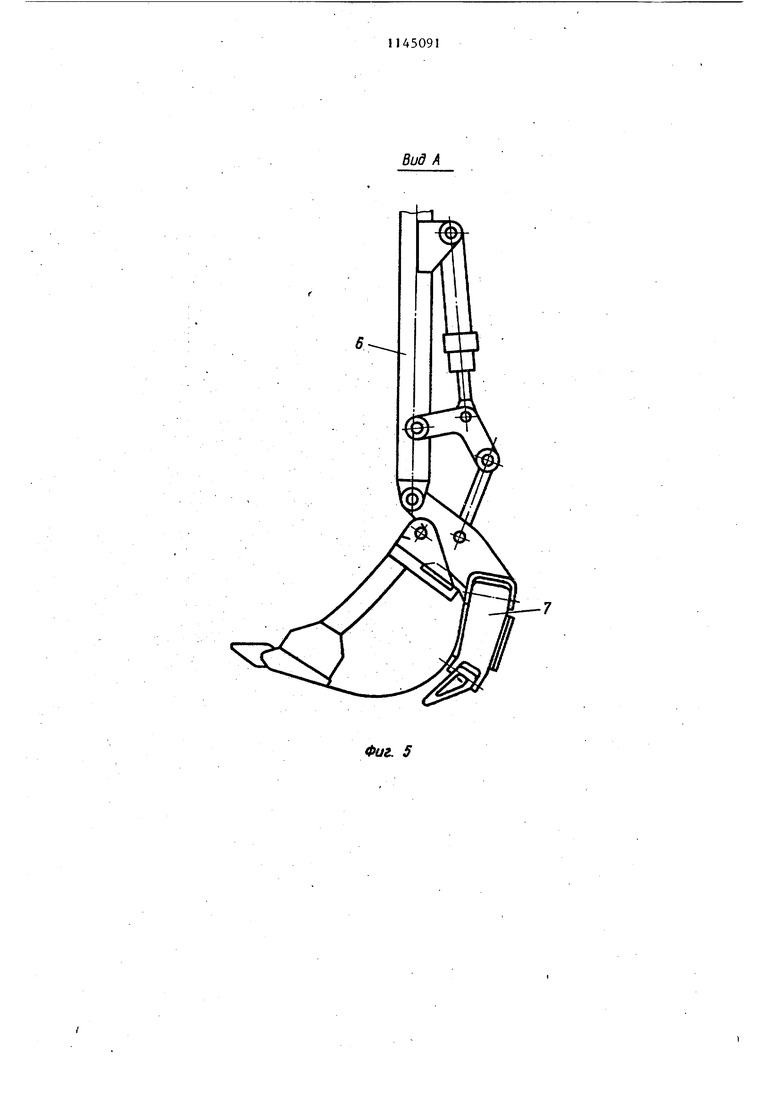
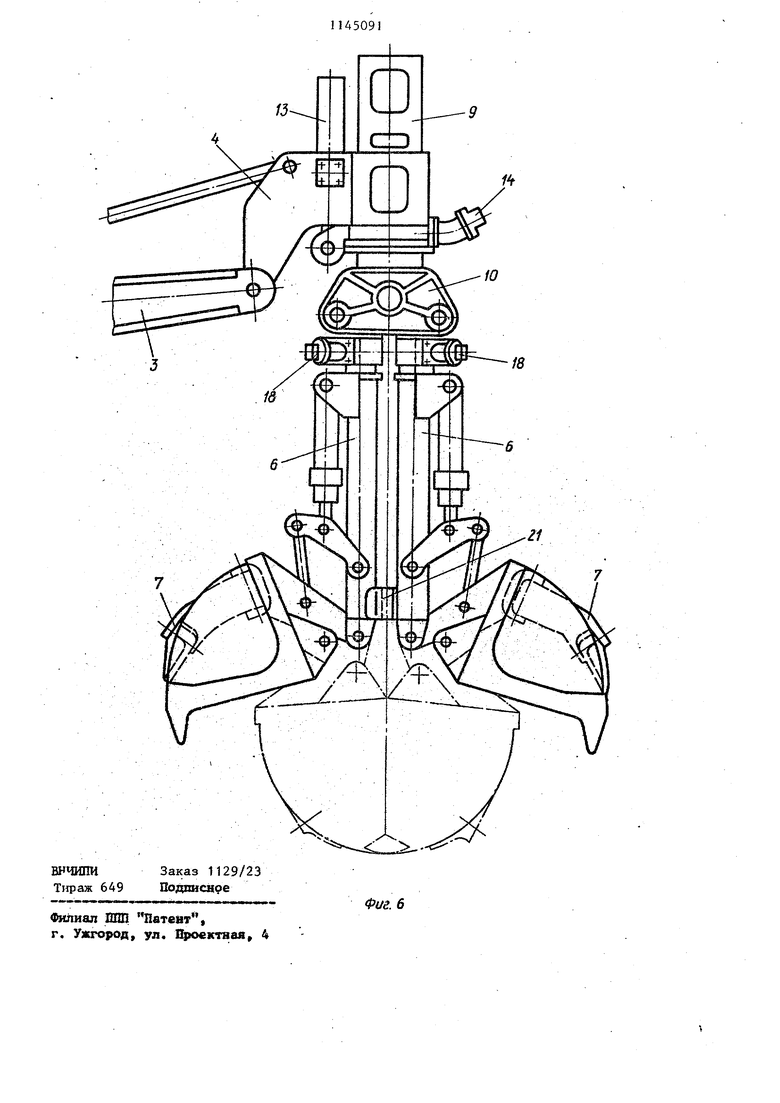
Изобретение относится к нашиностроеиию и может найти применение 13 машинах, предНдзнахшнных для выполнепиях строительных:, гидромелиора тивных, дорожных и других работ. Известна строительная,машина, предназначенная для выполнения как земляных, так и погрузочно-разгрузо ных работ, содержащая шасси, поворотную платформу, стрелу, рукоять и ковш с челюстью. Ковш присоединен к рукояти с помолью двухшарнирной встапкп с взаш-шо перпендикулярньа и осл..и шарниров. Известную машину можно использовать для копания обра ной лопатой, погрузочно-рагрузочпых работ с сыпучими материалами, осуществляя захват материала чед.остью и ковшом, как грейфером. Нал чие двухшарнирной вставки позволяет осуществлять манипулирование захваченными предметами jjj . Недостатком известной машины является низкая производительность при работе грейфером за счет неполного использования объема ковша и перемещения, вследствие этого малого объема грунта в единицу времени а также ограниченные возможност манипулирования захваченными предметами. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство для выполнения земляных и погрузочно-разгрузочных работ, включающее установленную на самоходном шасси поворотную платформу, стрелу и две рукояти с рабочими органами, поворё ные вокруг продольной оси и в плос кости проходящей через их продольные оси 2J . Данное устройство можно использовать для проведения различных вид работ: копания прям.ой или обратной лопатой, работы в режиме грейфера, захвата и. манипулирования отдельными предметами и т.д., не тратя времени на монтажные и дёмонтажные работы. Недостаткой устройства является то, что при использовании его как грейфера или захвата последние жестко ориентированы в плоскости, перпендикулярной плоскости подъема стрелы. Вследствие этого обработка траншей возможна только по оси движения базовой, машины и невозможно ориентиpOBainie в пространстве объектов манипулирования. Цель изобретения - расширение технологических возможностей манипулятора строительной мащины. Поставленная цель достигается тем, что устройство для вьшолнения земляных и погрузочно-разгрузочных работ, включающее установленн то на самоходном шасси поворотную платформу, стрелу и две рукояти с рабочими оргаг нами, поворотные вокруг продольной оси и в плоскости, проходящей через их продольные оси, снаблсено проме- ; жуточным звеном, щарнирно связанным со стрелой с возможностью поворота в плоскости подъема стрелы, а рукояти установлены -на промежуточном звене с возможностью вращения вокруг его продольной оси и возвратно-поступательного перемещения вдоль его продольной оси. Кроме того, промежуточное звено выполнено в В1ще кожуха с установленным в нем с возможностью возвратнопоступательного перемещения вдоль его продольной оси полым элементом, и корпуса механизма поворота рукоятей в плоскости, проходящей через их продольные оси, установленного с возможностью вращения внутри полого элемента, причем механизм поворота рукоятей в плоскости, проходящей через их продольные оси, выполнен в виде зубчатой передачи, звенья которой вьшолнены в виде зубчатых . секторов, на которых установлены рукояти, и привода. Механизм возвратно-поступательного перемещения рукоятей вдоль продольной оси промежуточного звена выполнен в виде гщроцилиндра, шток которого соединен с полым заеном, а цилиндр закреплен на кожухе промежуточного звена. Механизм вращения рукоятей вокруг продольной оси промежуточного звена вьшолнен в виде гидромотора, установленного на полом элементе, ичервячной передачи, червячное колесо которой установлено на корпусе механизма поворота рукоятей плоскости, проходящей через их продольные оси. Привод поворота рукоятей в плоскости, проходящей через их продоль- ные оси, выполнен в виде гидроцилинд ра, шток которого шарнирно соединен с одним из зубчатых секторов, а корпус шарнирно укреплен в корпусе меха низма поворота рукоятей.. Механизм вращения каждой рукояти вокруг своей продольной оси вьшолнен виде гидромотора и червячной передачи, установленных соответственно на казкдом зубчатом секторе механизма поворота рукоятей, а каждая рукоять соответственно установлена на выходном валу червячной передачи. На фиг. 1 изображено у,стройство для вьшолнения земляных и погрузочно-рагрузочных работ в рабочем состоянии, общий вид; на фиг. 2 - промежуточное звено, продольный разрез на фиг. 3 - устройство при работе в качестве захвата; на фиг. 4 - осна щение устройства инструментом по схеме прямой или обратной лопаты; на фиг. 5 - вид А на фиг. 4; на фит.б-у стройство при работе в качестве грейфера. , Устройство для выполнения земляных и погрузочно-разгрузочных работ состоит из поворотной платформы 1, смонтированной на самоходном шасси стрелы 3, промежуточного звена 4, соединенного со стрелой при помощи шарнира 5 с возможностью поворота в плоскости подъема стрелы, двух рукоятей 6 и рабочих органов 7. Обе рукояти смонтированы на промежуточном звене 4 с возможностью вращения вокруг его продольной оси, возвратнопоступательного перемещения вдоль ее, поворота в плоскости, проходящей через продольные оси рукоятей, и вращения вокруг своей продольной оси. Каждый рабочий орган 7 вьшолнен в виде захвата и смонтирован на концерукояти 6 с возможностью поворота в плоскости поворота рукоятей. Промежуточное звено 4 выполнено в виде кожухов (фиг. 2), внутри которого с возможностью возвратно-постунательного перемещения вдоль его продольной оси установлен полый элемент 9. Внутри полого элемента 9 с возможностью вращения з становлен корпус 10 механизма 11 поворота руко-. ятей в плоскости, проходящей через их продольные оси. Механизм 11 поворота рукоятей вьтолнен в. вдп.е зубчатых секторов 12, на которых смонтированы рукояти 6. Механизм возвратно-поступательного перемещения рукоятей 6 вдоль оси промежуточного звена 4 выполнен в виде гидроцилиндра 13, шток которого соединен с полым элементом 9, а корпус закреплен в кожухе 8 промежуточного звена 4. Механизм вращения рукоятей 6 вокруг продольной оси промежуточного звена 4 выполнен в виде гидромотора 14, KOTopbtfi смонтирован на подвижном элемерте 9 промежуточного звена, и червячной передачи 15, червячное колесо 16 которой закреплено на корпусе 10 механизма поворота рукоятей в плоскости, проходящей через их продольные оси. I Поворот рукоятей 6 в плоскости, проходящей через их продольные оси, осуществляется при помоЕЦ привода, вьшолпенного в виде гидроцилиндра 17, шток которого шарнирно соединен с одним из зубчатых секторов 12, а корпус закреплен в корпусе 10 механизма 11 поворота 1)укоятей. Механизм вращения рукоятей 6 вокруг своей продольной оси выполнен в виде гидромотора 18 и червячной передачи 19, которые смонтированы if а зубчатом секторе 12 механизма поворота рукоятей, при этом рукоять 6 смонтирована на выходном валу 20 червячной передачи. Для увеличения жесткости S конструкции на рукоятях 6 закреплен упоры 21. Для выполнения земляных работ устройство оснащено ковшами. За счет конструкции манипулятора при вьтолнении им. различных работ рукояти 6 .имеют возможность возврат но-поступательного перемещения вдол продольной оси промежуточного звена 4, вращения вокруг Heej поворота в плоскости, проходящей через продольные оси рукоятей, и вращения вокруг своей продольной оси, что позволяет путем преобразования конст рукции без демонтажно-моитажных работ приспосабнлвать манипулятор к свойствам среды и видам работ. С помощью указанных приводов и наличия на рукоятях 6 универсальных схватов 7 манипулятор имеет возможность м нипулировать различными объектами: перемещать и ориентировать в пространстве строительные материалы и ко струкции, выполнять погрузочнораз груз очные., операции с длинномерными грузами, производить стыковку и укладку в траншею дрен-ажных труб и т.д. Кроме того, для выполнения земляных работ при помощи захватов устройство оснащается различным экскавацйонным инструментом. К их числу относятся один или два ковша различной емкости иконфигурации. С помощью механизма в эащения рукоятей 6 вокруг продольной оси промежу точного звена 4 ковш,быстро уставав ливается прямой или обратной лопато Для получения оборудования в виде 91 грейфера ковши устанавливаются с помощью гидромоторов 18 и червячной передачи 19 режущей кромкой навстречу друг другу, при этом упоры 21 взаимодействуют друг с другом, препятствуя повороту рукоятей в плоскости, проходящей через их продольные оси, и обеспечивая тем самым жесткость конструкции. Положение ковшей может меняться в широких пределах. Это позволяет рытье траншеи в вертикальной плоскости как по оси базовой машины, так и в вертикальной плоскости, смещенной относительно продольной оси базовой машины. Конструктивное выполнение устройства обеспечивает в результате преобразования конструкции без демонтажномонтажных работ приспосабливание его к свойствам среды .и видам работ: захвату и ориентации в пространстве отдельных предметов, копанию прямой или обратной лопатой, работе в режи- . ме грейфера с рытьем траншеи и вертикальной плоскости как по оси, так к в вертикальной плоскости,, смещенной относительно продольной оси базовой, мащины и т.д. Наличие на рукоятях универсальных захватов позволяет работать различными типами оборудования. Это могут быть ковши различной емкости, ковши-планировщики, механизированный инструмент и т.д. Таким ., образом, технологические возможности манипулятора строительной машины значительно расширены.
CJ
Фиг. г
i
Фиг.
Фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рабочее оборудование одноковшового экскаватора | 1982 |
|
SU1027338A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рабочее оборудование гидравлического экскаватора | 1979 |
|
SU863780A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
