Отличительной особенностью устройства является при менение синусоидального механического построителя и двухрядного анкерного механизма с нанесенной на его храповых колесах программной величиной ходов клети, а также применение функционального потенциометра, управляющего тахометрпческим приводом, который, изменяя скорость вращения диска построителя, изменяет величину периода движения клети.
Эти устройства позволяют осуш ествлять программное управление клетью, одновременно повышая его точность.
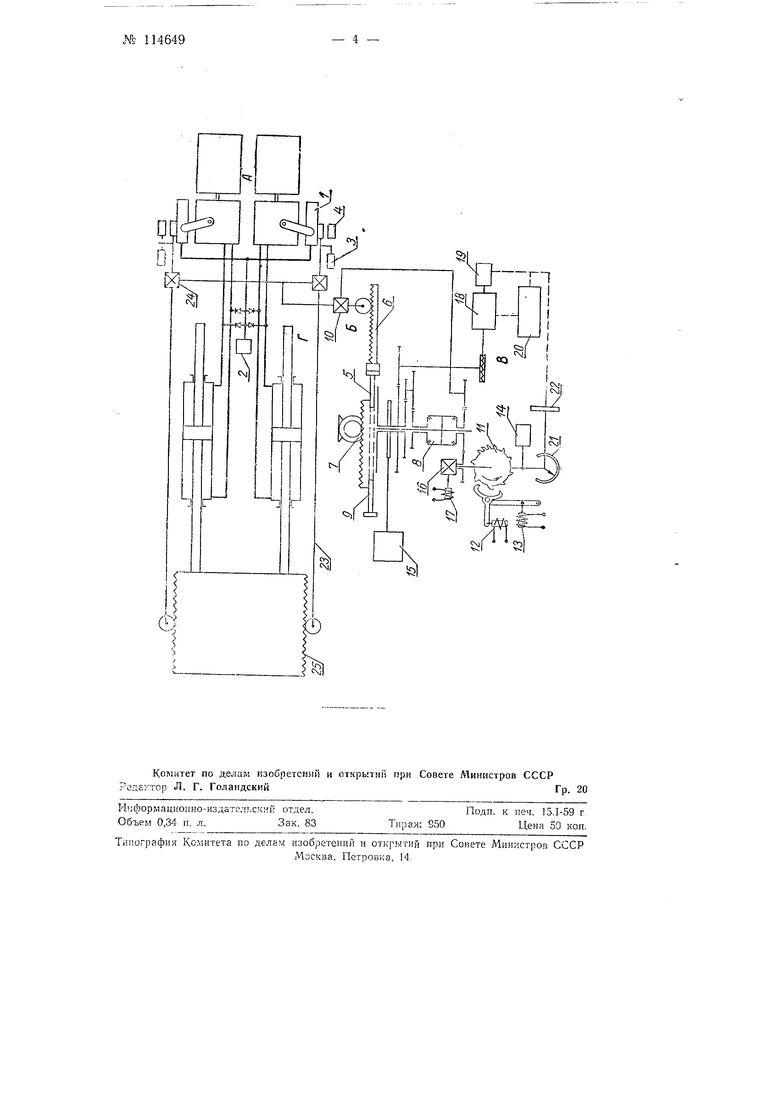
На чертеже показана схема устройства для автоматического управления станом холодной прокатки конических труб.
Устройство (гидропривод) состоит из насосов А, программного устройства Б, тахометрического привода В, линии механической обратной связи С.
Насосы А неременной производительности аксимально-поршневого типа с двойным песиловым карданом по одному насосу на каждый силовой цилиндр стана холодной прокатки труб имеют гидроусилитель / позиционного типа, обеспечивающий необходил ое пзмеиение наклона люльки насоса для создания требуемой в каждый момент времени производительности насоса в соответствии с заданной программой; вспомогательный шестеренчатый или поршневой насос 2, покрывающий утечки из силовой части гидропривода и питающий гидроусилитель /; ограничитель мощности 3, принудительно снижающий производительность насоса при превышении установленного наибольшего давления; нульустановитель 4, ставящий люльку насоса в нейтральное положение для облегчения запуска приводного электродвигателя пасоса.
Программное устройство Б (общего на оба насоса), задающее требуемую величину амплитуды и точки реверса клети, имеет механиJ a 114649
ческий построитель 5, создающий сниусоидальное поступательно-возвратмое движение рейки 6 с требуемым и изменяемым периодом и амплитудой в масштабе, например, 1 : 5 по ОТЕОШСНИЮ к амплитуде движения клети стана; зубчатую передачу 7 для изменения величины эксцентриситета синусного построителя, т. е. для изменения амплитуды хода клети стана; дифференциал S, исключающий вращение диска 9 построителя на величину его эксцентриситета, дифференциал 10, смещающий синусоиду задаваемого движения для получения постоянной точки реверса с обратного на рабочий ход клети, при изменении величины амплитуды (хода) движения клети, т. е. при переменной точке реверса с рабочего на обратный ход; сдвоенное храповое колесо 11 с зубьями, расположенными согласно программе уменьшения хода клети с учетом величины скоростной ощибки сложения гидропривода при различных амплитудах и периодах; одно колс;со по отношению к другому смещено вокруг их общей оси на величину углового размера анкера за вычетом половины наимепьщего расстояния между зубьями колеса, причем один зуб анкера упирается в зубья одного колеса, а другой зуб анкера - в зубья другого храпового колеса; электромагнит 12, за одно срабатывание дающий возможность храповому колесу повернуться на один зуб (при различном расстоянии между зубьями, согласно нанесенной программе уменьщения хода клети стана); электромагнит 13, дающий возмолшость возврата храповых колес в исходное положение для проката следующей конической трубы; моментньш двухфазный индукционный электродвигатель 14, создающий вращение храповых колес в сторону постепенного уменьщения амплитуды движения клети или быстрое возвращение в положение наибольшей амплитуды путем переключения питания этого мотора; контактно-переключающее устройство 15j действующее от к лачков вала программного устройства, обеспечивающее срабатывание электромагнита 12 для поворота храповых колес 11 на один зуб в начале каждого рабочего хода клети или при переключении от руки - двойное срабатывание электромагнита 12 и поворот храповых колес на два зуба в первой части каждого второго хода клети; дифференциал 16 для введения корректуры в положение точек реверса при работе с периодом настроечного режима, сильно отличающегося от рабочего из-за изменения величины скорости ощибки сложения гидропривода в зависимости от величины периода; электромагнит 17, служащий для ввода корректуры через дифференциал 16 при переключении системы управления станом па настроечный режим.
Тахометрический привод В, обеспечивающий поддержание и изменение величины периода движения клеги стана путем вращения с соответствующей скоростью диска программного устройства, имеет индукционный двзхфазный электродвигатель 18, вращающий через передачу диск синусного построителя так, чтобы время одного оборота диска равнялось периоду одного полного (двойного) хода клети; тахогенератор 19, вращаемый двигателем 18 и служащий для стабилизации заданного периода; ламповый или магнитный усилитель 20, служащий для питания двигателя 18 от разности напряжений функционального потенциометра 21 и тахогенератора 19 для вращения двигателя 18 с заданной скоростью; функциональный потенциометр 21, с которого снимается напряжение, обратно пропорциональное величине периода движения клети; движок потенциометра поворачивается от вала храповых колес 11 программного устройства, устанавливая, тем самым величину периода в зависимости от величины амплитуды
движения клети; потенциометр 22, включаемый в цепь тахометрического привода для получения периода настроечного режима- Линии механической обратной связи Г, обеспечивающей слежение в каждый момент времени, силовыми цилиндрами и клетью стана за положением выходного валика программного устройства и имеющей на каждый насос переменной производительности точную механическую передачу 23, подающую величину линейного перемещения клети 25.
Дифференциал обратной связи 24, непрерывно вырабатывающий разность между углом заводки, поступающим от программного устройства, и углом обработки, поступающим по передаче 23. Эта разность создает смещение золотника гидроусилителя /, изменяющего производительность основного насоса для обеспечения слежения гидропривода за программным устройством при всех заданных изменениях, амплитуды, периода, нагрузки, а следовательно, скорости и ускорения движения клети 25.
1.Устройство для автоматического управления станом холодной прокатки конических труб, включающее: два силовых гидравлических цилиндра, порщни которых через щтоки связаны с клетью стана, и два насоса переменной производительности для подачи в цилиндры жидкости, под давлением которой происходит перемещение клети, несущей профильные валики для раскатки цилиндрической трубной заготовки в коническую трубу, отличающееся тем, что, с целью осунхествления точного программного управления величиной хода клети стана, оно снабжено задающим программным устройством, выполненным в форме синусоидального механического построителя, получающего сигналы от двухрядного анкерного механизма с нанесенной на его храповых колесах программной величиной хода клети и воздействующего на изменение производительности насосов устройства.
2.В устройстве по п. 1 применение функционального потенциометра, управляющего тахометрическим приводом, который, изменяя скорость вращения диска построителя, изменяет по заданной программе величину периода движения клети.
- 3 -№ 114649
Предмет изобретения
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический привод механизма шагания экскаваторов | 1955 |
|
SU109065A1 |
| Устройство для автоматического выравнивания подвижной траверсы гидравлического пресса | 1956 |
|
SU115029A1 |
| Электрогидравлическая следящая система для манипулятора | 1958 |
|
SU116059A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| РЕКУПЕРАТИВНАЯ РЕВЕРСИВНАЯ БЕССТУПЕНЧАТАЯ ГИДРОТРАНСМИССИЯ КОЛЕСНОЙ МАШИНЫ | 2003 |
|
RU2259928C2 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| Электрогидравлическая следящая система с насосом переменной производительности | 1958 |
|
SU116425A1 |
| Товарный регулятор ткацкого станка | 1987 |
|
SU1481293A1 |
| Гидропривод | 1983 |
|
SU1132090A1 |
| ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ и РЕГИСТРАЦИИ МОМЕНТА ПРУЖИННОГО ДВИГАТЕЛЯ | 1973 |
|
SU368582A1 |