Описыйаемая злехтроги:; равличе:--;-сая с.:е;дя1цг 1 сягтема с насосом :;epeMen;toii лронэводигельности и эл лт;:смдгн.тнъ;.; управлением, по ;-р;1 ;нен тю, натгример, с. системами скорост-ного так я с управляющим элглтрслзшятелем,увеличивает
точность слежен1Л,л :-5 тяже.яых динамических режимах.
Элслтрогидравличесхая следящая система .выполнена з ,зиде двухкаскадного гидроусилителя с электромагнитным управлением, зоздейстзующего на Насос переменной ароиззодительностк, что .обеонечивает повышение устойчивости работы системы.
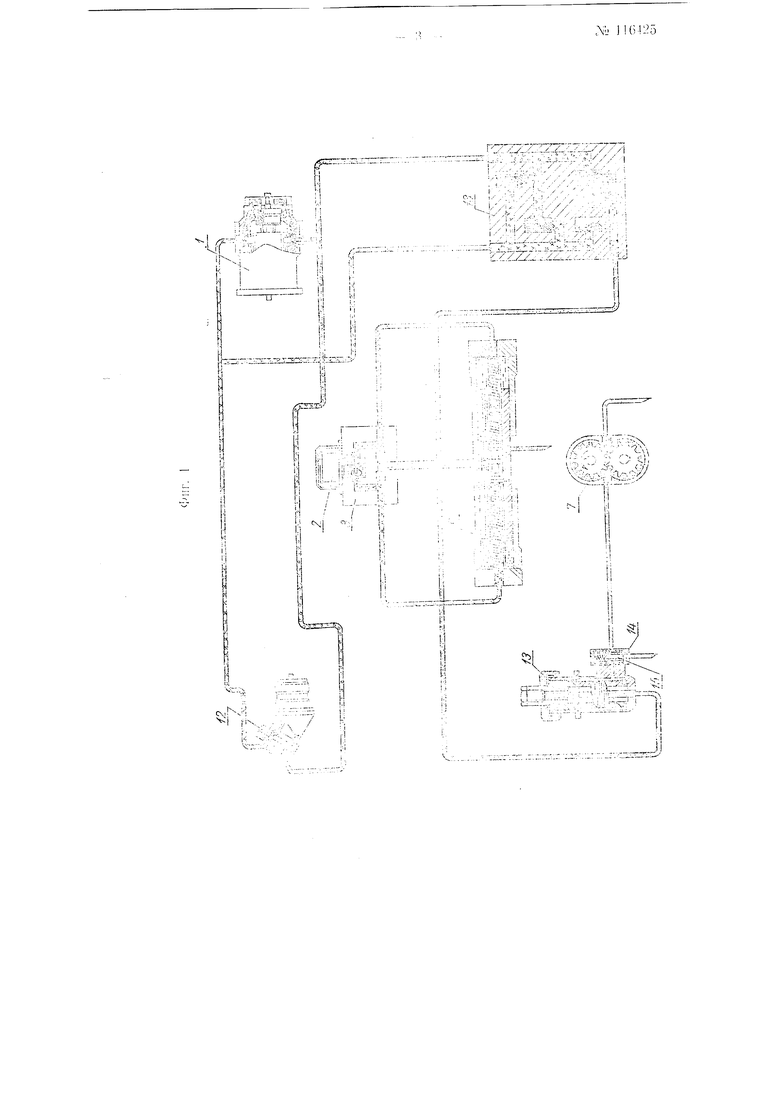
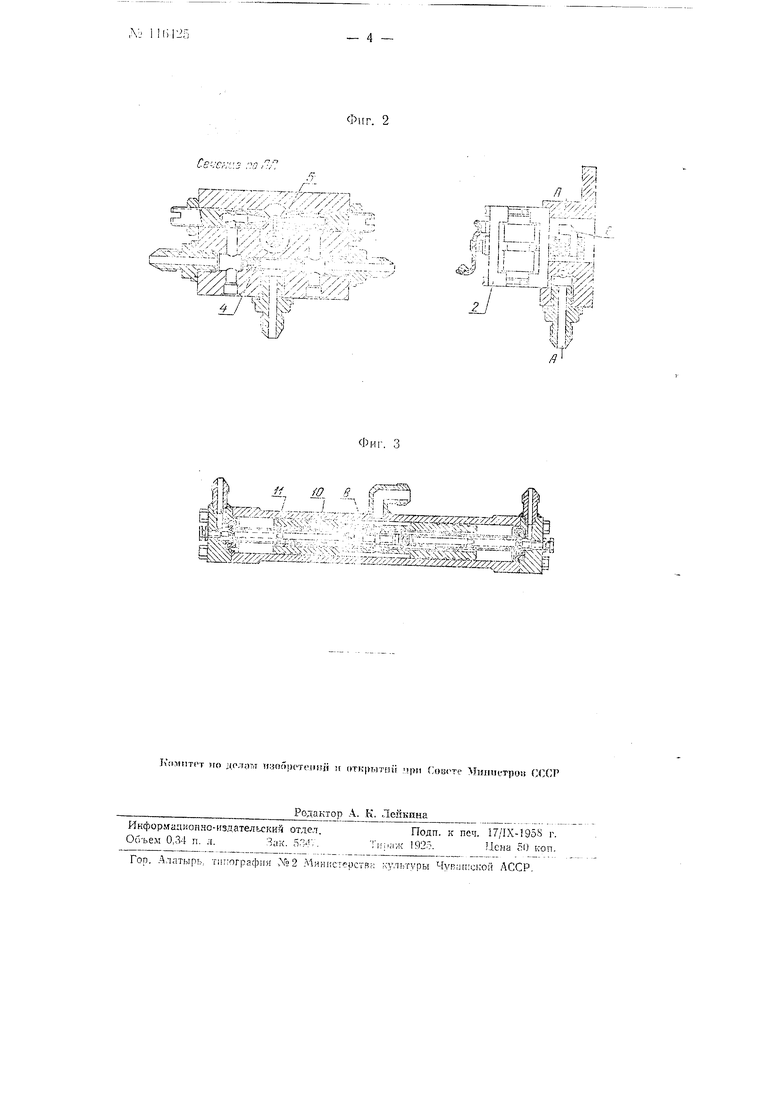
На фиг. 1 изображена гидравлическая схема следящей системы; :ia фиг. 2-иолеречиый разрез гидроусилителя первого каскада; на фиг. 3-продольный разрез гидроусилителя -второго каскада.
Злектоогидравлйчеокая следящая ..-истема включает IB себя гидропривод объемного регулирования со зссм:; необходимыми элементами гидроаг5томатикк и двухкаскадныи 1 тдроу;:илл тель позицион-ного т-гпа члектромагнитны.ч управлением.
I и.чролсклитель служит для унразления положением люльк1и пасОСа 1 переменной производительности в зависимости ст разности токов, обтекающих управляющие полуобмотки электромагнита 2, имеющего ли:;сйп ю Злвис.имость угла поворота сто зала от разности упразляюиптх 10 ко Б.
Первый каскад 3 гидроуоилителя состоит из двух постоянных дрОСселей 4, .двух сопел 5 и заслонки 6. расположенной на валу поворотного элскгромагнита. Рабочая ж.Идкость, поступающая от щестервнного н-асоса 7, проходит через постоянные л.россели 4 и попадает в полости под обоими торцами золотника 6 второго каскада 9 гидроуоилиге.пя. Давлекие в указанных полостях зависит о.т положения заслонки 6, т. е. от угла поворота электромагнита 2 по отношению к нормальному положению. Под действием разности сил, возникающих от разности давления масла, золотник К начинает перемещаться до тех пор, пока силы от разности давлеи 1ч па ТОПГ1.Ы зого- никя не vpaa-Hoно jH 1Чя avi-i гпп: лс(|)орм ирова ни иружи} W.
Обратная -Мсхани1гесхая связь между поршнем 11 и золотником 6 второго каскада 9 гидроуси;гителя обеспечивает поворот люльки основного насоса 1 на ) пропорциомальньпг разности то7-;ов, обтекаю i K управляющие полуобмотхи электромагнита, т. е. скорость вращения глдромотора 12, Лнтающегося от ланяото насоса, будет пропорциональна входному электрическо гу сигналу.
В устрой.стзе такЖе имеется клапанная коро.бка 13, фильтр 14 и ллапа.н фильтра 15.
Из .мерительно системой, служа;цеГ для зырасотхи электрическото сигнала рассогласования между задающим и исполнительным jCTРойством и а хтИЗИЗирующей сл-едяпдую сКСтему з непрерыв ной схеме управления является сельсинная пара, а в дискретной-устройство для сраваепия числа задалных и отр-абэтан.ных импульсов (электрическая схема электрогидравл.-лческой следящей системы на чертежах не показана) .
Основным стабилизирующим средством является цепь обратной связи по току управляющих обмоток электромагнита. В качестве дополнительното демпфирующего элемента может оыть использована иринимаюи 1а.я тахомашики, напряжение от которой, проходя через дифференцир ющий контур, яв,1яется стабклкзируюпи-тм систему сигналом.
Для компенсации ско1)остной 01пиб:- и 3 схему .может быть введена дающая тахомашин а.
Управляющий электромагнит 2 ппт.ается от электронного (криста. лического, .матклтного) усилителя, ка вход которого подается сигнал ошибки и сигналы дающей и принимающей тахо-ма,щил. Усилитель Имеет внутрениие обратные связи .г:о току у1ПраБляюидего электромагнита.
П р е д м е т и з о б р е т е н и я
Э.ектроглдравлическая следящая систе.ма с «а-сосом переменной нроизводительности и электромагнитным управлением, отличаюихаяся тем, что, с целью увеличения точности слежения в тяже.чых ди-намических режимах, oira 1Г;.:толпена в в-кде .двухкаскад.ного гидроусилителя с электроматнитпым управлением, воздействующего иа насос переменной производительносги, что обеспечивает повьгиеннс УСТОЙЧИВОСТИ системы.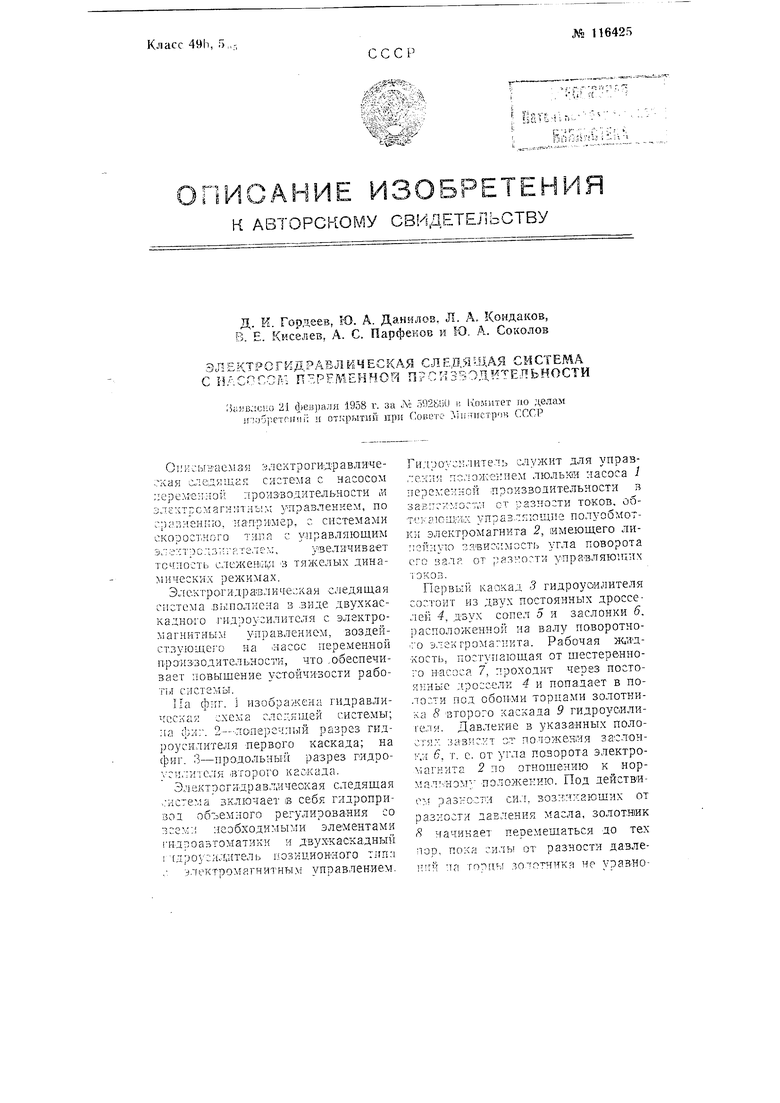

А
}
. И Ьг-э
%Sxz5x/p; -;g:r- Aj,J2i
J/
