Электрогидравлические следящие системы для манипуляторов, содержащие сельсины, известны. Сигнал этих сельсинов, обычно цосле усиления через электромагнит и двухкаскадный гидроусилитель позиционного типа управляет скоростью вращения гияромотора манипулятора.
Особенность предложенной следящей системы заключается в том, что в ней применена обратная связь гидроусилителя с рукояткой оператора. Обратная связь выполнена в виде цилиндра, в котором перемещается золотник с рейкой, входящей в зацеп.1ение с зубчатым колесом,, жестко связанным с рукояткой. ,
Эта особенность обеспечивает высокую точность слежения и плавность работы манип.улятора.
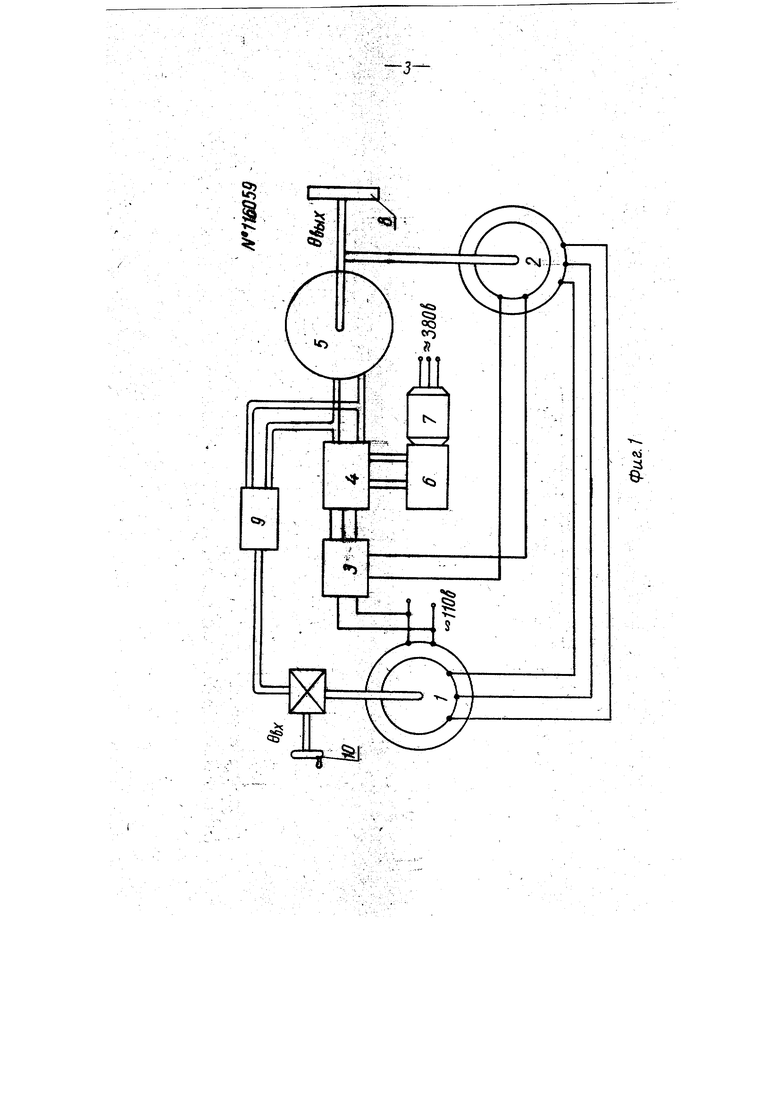
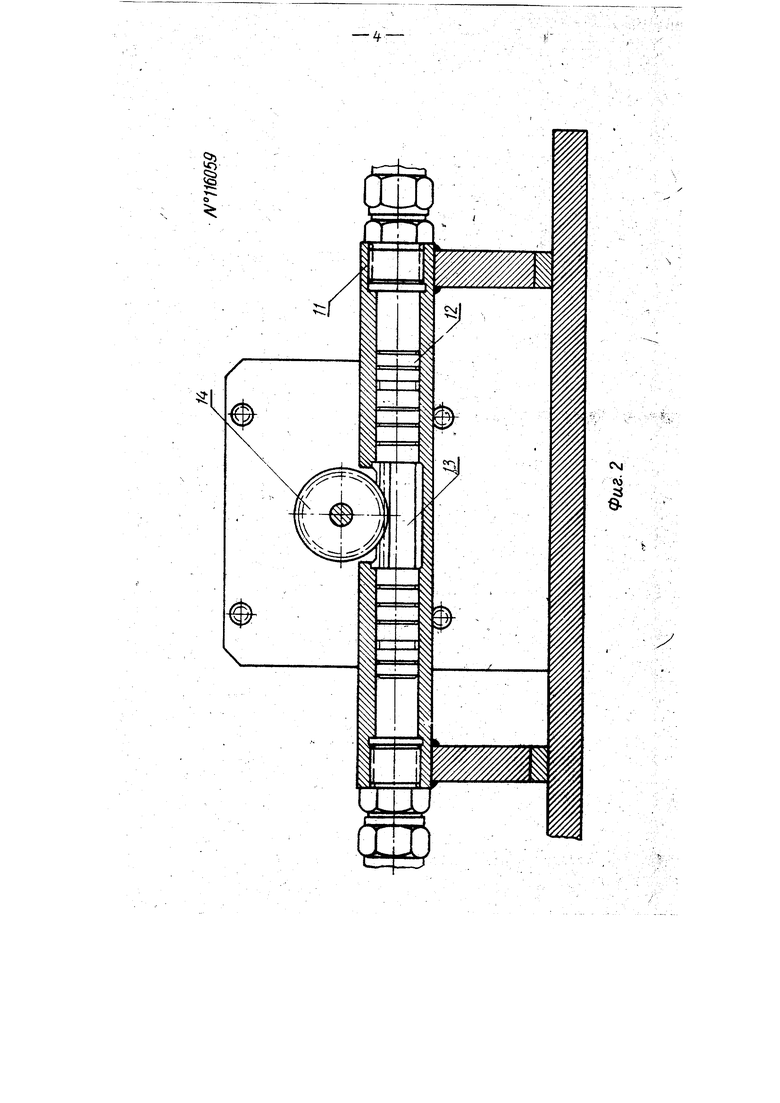
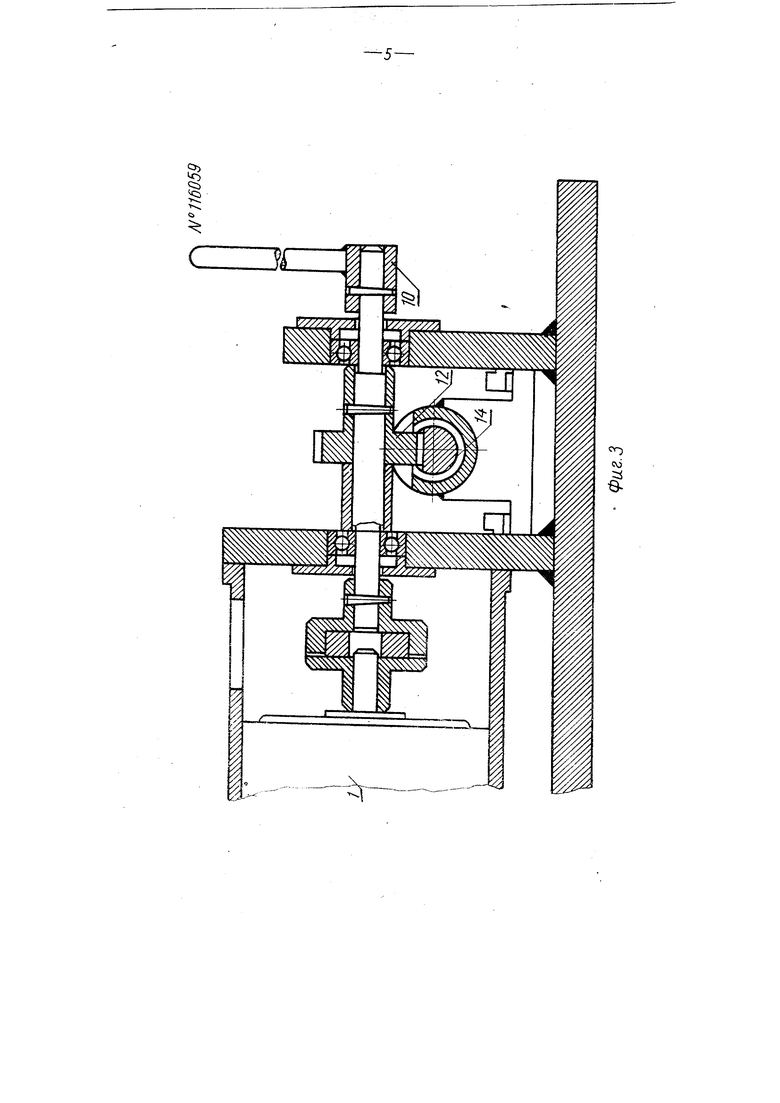
На фиг. 1 изображена блок-схема привода элект-рогидравлическойследящей позиционной системы с обратной связью,, а на ,фиг. 2 и 3 соответственно изображены продольный и поперечный разрезы цилиндра этой связи.
Задача описываемой системы состоит в том, чтобы соединение типа «локтевой сустав -манипулятора выполняло определенные угловые перемещения, задаваемые оператором. Управление - дистанционное. Угол поворота сельсина-датчика / (фиг. 1) все время сравнивается с углом поворота сельсина-приемника 2, чем обеспечивается непрерьшное управление манипулятором. Если эти положения согласованы, то на выходе сельсина-приемника сигнал равен нулю. Если оператор рассогласует сельсин-датчнк относительно сельсина-приемника, то на выходе дослеДнего появится электрический сигнал, который, будучи усилен электронным усилителем 3, поступает на управляющую обмотку электромагнита двухкаскадного гидроусилителя 4 позиционного ти.па. Этот гидроусилитель применен для уменьшения выходной мощности электронного усилителя, снижения постоянной времени электромагнита и, следовательно, повышения УСТОЙЧИВОСТИ электрогидравлической следящей системы, а также для достижениявысокой точности слежения и плавности
J Jj6059 рабдты А1анипулятора. При нейтральном положении золотника обе каме-. ры гидромотора 5 перекрыты и он не работает. При смещении золотника одна ий камер гидромотора соединяется с полостью нагнетания гидроусияителя- 4, а другая - со сливом, и ротор гидромотора, начинает вращаться со скоростью, пропорциональной величине смещения золотникаИЗ .трального полбжен-ня. Следовательно, скорость вращения ротора гидромотора в конечном счете пропорциональна разности токов в управляющих об мотках электрол аг.нита, т. е. равна скорости поворота датчика, Нз блок-схеме цифрами ( и 7 обозначены насос постоянной лроизво-; дительности и срединенный с ним электродвигатель, а 5 - нагрузка, например, механическая рука с грузом.
С выхода гидроусилит-еля 4 масло поступает также на вход устройCTBaj передачи усилия. Передача, усилия, пропорционального нагрузке на исполнительном конце, на рукоятку 10 оператора происходит следую.11шм образом, Собеих сторон цилиндра // (фиг- 2 и3) механизма управления подводится масло от гидроусилителя 4. Величина усилия не плунжере 12 с рейкой 3 зависит от разности давлений с обеих стороН: плунжера. Прямолинейное движение рейки преобразуется во враШЛ тельное движение сцепленной с ней шестерни .М На одном валу с шестерней сидит сельсин 1 и рукоятка 10 оператора. Усилие, действующее на рукоятке оператора пропорционально разности давлений, т. е. вращающему моменту гидромотора.,Так, например, разности давлений в 30 arat со.ответет5&уе г враща1ощий момент гидромоторй в 100 кем к усилие на рукоятке -/, равное 3 кг, направлено в сторону действия нагрузочного JiioMeHTa н-а валу мотора..
Предмет изобретения
Элекарогидравлическая следящая система для манипулятора с сель синами, сигнал которых после усиления через электромагнитидвухквскаднь 1Й Гидроусилитель позиционного типа управляет скоров ью ярд щёшш гидромотора & анипулятора, отличающаяся тем, что, с целыЮГголучения .высокой точности слежения и плавности работы манипулятора, применена обратная связь гидроусилителя с рукояткой оператора, выполненная в виде цилиудра, в котором перемещается золотникС рейкой, в.1 содящей в зацепление с зубчатым колесам, жестко связанным с рукояткой.. . .. , ,
«vi
id
CNJ СО
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая следящая система с насосом переменной производительности | 1958 |
|
SU116425A1 |
| Устройство для автоматического выравнивания подвижной траверсы гидравлического пресса | 1956 |
|
SU115029A1 |
| Устройство для автоматического управления станом холодной прокатки конических труб | 1956 |
|
SU114649A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА РАЗДЕЛЬНОГО ТИПА | 1966 |
|
SU184577A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Электрогидравлический привод механизма шагания экскаваторов | 1955 |
|
SU109065A1 |
| РЕВЕРСИВНЫЙ ПРИВОД С НЕПРЕРЫВНЫМ ПОЗИЦИОНИРОВАНИЕМ КУЛАЧКОВОГО ВАЛА ГЛАВНОГО РАСПРЕДЕЛИТЕЛЯ ГИДРАВЛИЧЕСКОГО ПРЕССА | 1996 |
|
RU2093365C1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |