Известны у.юктроги.чрав.мнческие приводы механизма шагания экскаваторов, в которых подача жидкости в иодъе.ные и вспомогате.тьиые ци.тиндры осуществлг.ется насосами, а сог.тасованнос действие цилиндров обеих сторон обеспечивается дифференциальным устройством.
Отличительной особенностью онисываемого привода является то. что д. уменьшения расхода энергии на привод механизма шагания при одновременной автоматизации управления чроцессо.м пе|)едв1 жеиия акскавагора д.1я подачи жидкости в цилиндры применены насосы переменной ироизводительиости с системой к.чананов для пополиения и слива .мас/ia из системы и поддержания в ней необходимого давления.
Для обесиечения автоматического действия привода от программного устройства применены ирофи.тьиые диски с передающими и принимающими се.аьсинами.
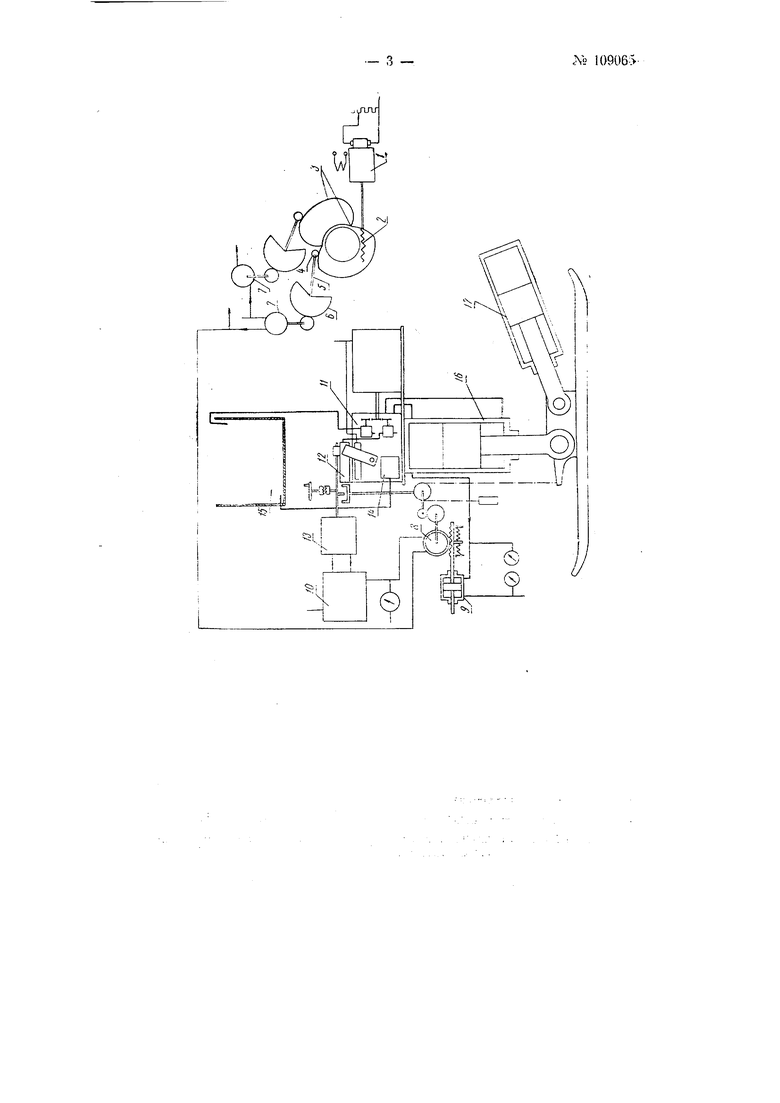
На чертеже изображена схема электрогидравлического привода.
Электрогидравлический привод
механизма п а1ания экскаватора вк.почает; а) программное устройство, распо.тоженное в кабине маН1иниста экскаватора н состоящее из мотора /; червячного редуктора 2 с передаточньп числом, обеспечивающим время одного оборота выходного вала, равное времени па одни шаг экскаватора; двух профильных дисков 3, которые пред назначены для управления положением порщнеГ г.тавных цн.тиндров п д.тя уирав.тения положением поршней вспохюгате.пзпых цилиндров; роликов -/, рычагов .5, секторных пе 1едач 6. с.чужащих для. поворота роторов, дак)ии-. сельсинов 7 в зависимости от ирограммы перемещения поршней силовых цилиндров, нанесенной на профильных дисках 3; двух бесконтактных сельсинов 7 с ценой оборота неско.тько больще ве.тичины хода иоршня главного И.1И вспомогате.мьного ци.чиндров экскаватора; б) принимающее устройство, состоящее из принимающих бесконечных сельсинов 8, электрически соединенных с датчиками и создающих управляющее
напряжение, зависящее от величины рассогласования между по.южением диска программного устройства и положением поршня силового цилиндра; гидравлических цилиндров 9, по.лости которых соединены с ио.юстяхги силовых цилиндров обоих бортов, совершающих подъем или соответственно tieремещение экскаватора; четырех ламновых или магнитных уси.чнтслей 10, служащих для уси.1ения, сложения и преобразования э.чектрических сигналов; в) приводное устройство, состоящее из насосов // неременной производительности аксиально-порн1невого типа с двойным несиловым карданом по одному на каждый си.ювоп ни.тиндр, гидроуснлите.тя 12 ;1;ля регу.чировапия цроизводительности насоса, управляющих механизмов 13, осуществляющих неремещение золотника гидроуси.тите.тя, клапанной коробки 14 с шестью к.чананами, служащей для пополнения и слива масла гидросистемы в бак 15, i также д.1я поддержания необходимых ве.тичин давления при различных режимах работы гидропривода и двух нар подъемных 16 и вcпo oгaтeльныx цилиндров 17, расположенных с каждой стороны экскаватора и служащих для его приподнимания п передвижепия; д) устройства, кредназначепные автоматизмровип, умравление механизма шагания i выравнивать рсагрузку между оболми бортами экскаватора.
В нроцессе работы экскаватора в подъемные 76и вспомогате.тьные 17 цилиндры подача жидкости осуществляется при помон и насосов // переме1 ной прсизводительностн через систему клапанов, кот())ье произвохцтт попо.тнеппе и слпв масла из системы и поддерживают в ней необходимое давление, приводя в действие привод .к xaпиз ra шагания.
ripe д м е т п з о б р е т е п и я
1.Э.тект|П)гидрав.1ически11 привод кгеханизма п агания экскаваторов, при котором подача жидкости в подъемные я )гaтe,П5Hыe ци.шндры осупгеств.пяется насосами, а ссг.-|асоианное действие цили 1дров обеих сторон обеспечивается дифференн,иа.1Ы1ЫМ yci ройством, о т .т и ч а ю щ и и с я тем, что, с це.тыо умепынепия )асхода энергии на привод л ехаинзма шагания при од1 овременпой автоматизации управ.тения процессом передвижения экскаватора для подачи жидкости в ци.1индры, применены насосы неременной производительности с комн;|ектом перепускных клапанов.
2.В устройстве по н. 1 прил енепие нрофильн1)1х дисков с передающими и 11ринимаюи1ими сельсинами, обеснечиваюн;и.х автоматическое действие привода от программного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления станом холодной прокатки конических труб | 1956 |
|
SU114649A1 |
| Устройство для автоматического выравнивания подвижной траверсы гидравлического пресса | 1956 |
|
SU115029A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МЕХАНИЗМОМ ШАГАНИЯ ЭКСКАВАТОРА | 1969 |
|
SU255135A1 |
| Электрогидравлическая следящая система для манипулятора | 1958 |
|
SU116059A1 |
| Механизм шагания | 1986 |
|
SU1328448A1 |
| Устройство для обесшламливания и гидравлического транспортирования сыпучих материалов | 1951 |
|
SU97353A1 |
| Грузоподъемный кран на колесном ходу | 1973 |
|
SU540807A1 |
| Гидравлический привод механизма шагания экскаватора | 1983 |
|
SU1113492A1 |
| Электрогидравлическая следящая система с насосом переменной производительности | 1958 |
|
SU116425A1 |
| Гидравлический привод механизма шагания экскаватора | 1983 |
|
SU1135861A1 |