изобретение Относится к измерительной технике и может быть использовано для преобразования перемещений подвижных объектов.
Известен способ преобразования перемещений, заключающийся в том, что обмотки чувствительного и компенсационного элементов напитывают переменным напряжением, путем изменения напряжения-источника пита1шя стабилизируют падение напряжения на обмотке чувствительного элемента и выделяют разностное напряжение на обмотках чувствительного и компенсационного элементов Л.
Известно устройство для преобразования перемещений, содержащее источник питания, якорь, обмотки чувствительных и компенсационных элементов, подключенные к источнику питания lj
Недостатком способа и .устройства является невысокая точность за счет наличия динамической погрешности.
Наиболее близким к изобретению по технической сущности является способ преобразования перемещений при помот щи дифференциальных индуктивных датчиков, заключающийся в том, что переменным напряжениемзапитывают обмотки чувствительных элементов и компенсащюнные. лементы, сравнивают напряжения на обмотке чувствительного элемента и на компенсационном элементе и вьщеляют их разность, по которой судят о величине перемещения ..
Наиболее близким к изобретению по технической сущности является устройство для преобразования перемещений, содержащее источник питания, магнитопроводный якорь, обмотки чувствительных элементов, компенсационные элементы, соединенные с обмотками чувствительных элементов по мостовой схеме, подключенной диагональю питания к источнику питания 2
Недостатком известных способа и устройства является невысокая to4ность преобразования вследствие наличия динамической погрешности, обусловленной возникновением генераторной ЭДС в обмотке чувствительного элемента при движении якоря.
Цель изобретения - повышение точ ности преобразования путем снигсения динамической погрешности.
Поставленная цель достигается тем, что согласно способу измерения перемещений при помощи дифференциаль ных индуктивных датчиков, заключающемуся в том, что переменным напряжением запитывают обмотки чувстви,тельных элементов и компенсационные элементы, сравнивают напряжения на обмотке чувствительного элемента и на компенсационном элементе и вьоделяют их разность,.по которой судят о величине перемещения, выделенную разность дискретизируют с запаздыванием по отношению к началу периода питающего напряжения, величину которого определяют расчетньв путем из условия равенства нулю составляющей, которая представляет собой сумму величин, пропорциональных соответственно скорости перемещения якоря и активному сопротивлению обмотки чувствительного элемента.
Устройство для преобразования перемещений, содержащее источник питания, магнитопроводный якорь, обмотки чувствительных элементов, компенсационные элементы, соединенные с обмотками чувствительных элементов по мостовой схеме, подключенной диагональю питания к источнику питания снабжено первьм формирователем, подключенным к источнику питания, элементом задержки, включенным на выход первого формирователя, и блоком отбора и запоминания аналоговых сигналов в виде второго формирователя, вход которого подключен к выходу элемента задержки, ключа, информационные входы которого подключены к измерительной диагонали мостовой схемы, образованной обмотками чувствительных элементов и компенсационными элементами а управляющий вход - к выходу второго формирователя, и ячейкой памяти, включенной на выходе ключа.
Способ реализуется следующим образом.
Запитывают обмотки чувствительных элементов и компенсационные элементы переменным напряжением. Выражения для магнитных проводимостей GI и G2цепей первого и второго чувствительньк элементов могут быть записаны в виде
Q,gXtqo(Xo+Vt) + Qo, (1) q «- X4Go-( o+vt1 + qo 7 (2)
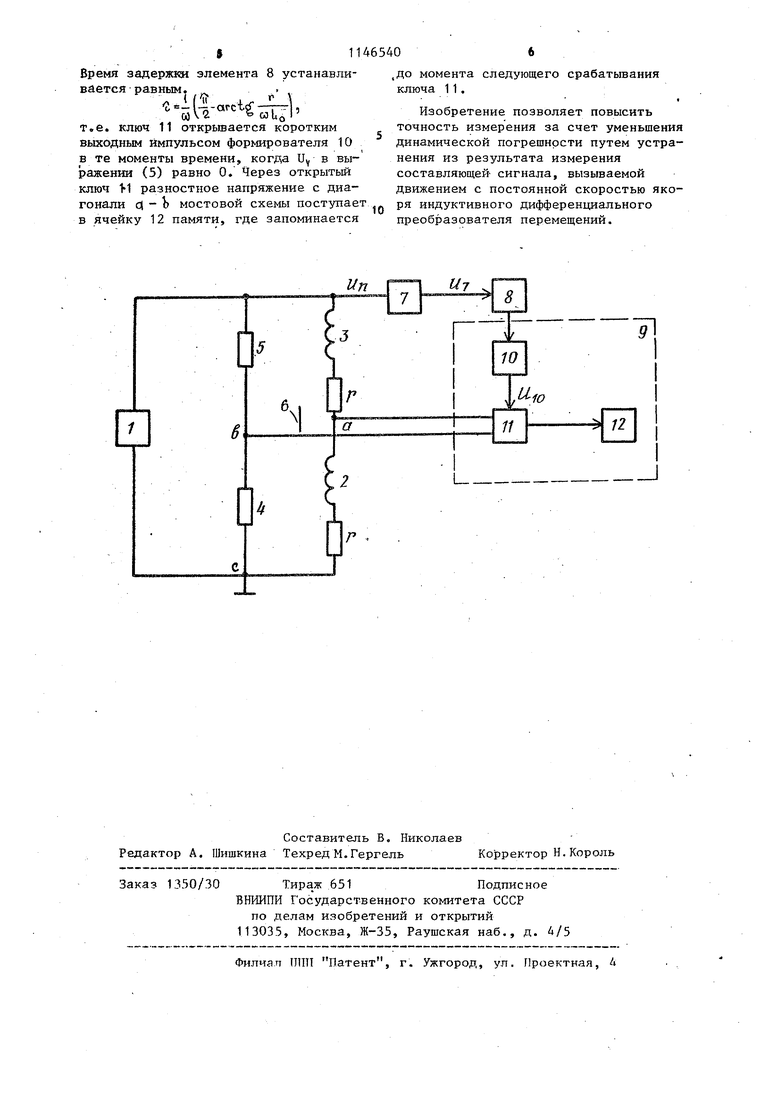
где Хв - начальное положение якоря; . GO магнитная проводимость цепи. чувствительного элемента при нейтральном положении якоря; - коэффициент пропорциональйости;t - время; V - скорость движения якоря. Поскольку общая магнитная проводимость цепей чувствительных элемен тов дифференциального индуктивного датчика при перемещении якоря не ме няется, амплитуда тока i, протекающего по обмоткам чувствительных элементов, также постоянна: И(3) ; .Co5(wt + qrcUQ), где О - амплитуда питающего напряжения ; (О - частота питающего напряжения ; г - .активное сопротивление обмоток;LO - индуктивность обмоток; %1„. Сигнал, вьщеляемый на обмотке чувст вительного элемента, равен аФ . ,, U , С4 где VV - число витков; . iWqj ( - магнитная проводимость цепи чувствительного элемента. Следовательно ., 2 1 2, G- +VA/S-- -t-ri x6l.Ti(wtfoirc-tg(- ; W gVl-pV xco5(wt + ) U,i-v UY ./5 Вьщеляют разность л напряжений н обмотке чувствительного элемента и на компенсационном элементе A Ux + U,-0.,)(6 Выделенную разность дискретизируют в тот момент t времени в пределах периода питающего напряжения, когда ее составляюй1ая Uy,представляющая собой сумму величин, пропорциональных соответственно скорости перемещения якоря и активному сопротивлен обмотки чувствительного элемента, принимает нулевые значения. I ( (.fi , . 2|ГК , 2Trk toc- h-° ct 4hir -w-При этом уровень напряжения U, дискретизированного в момент t ,, определяется выражением Tbto « - i в которое не.входит скорость перемещения якоря. Полученные значения дискретизированного напряжения запоминаются до следующего момента дискретизаций. На чертеже приведена блок-схема устройства преобразования перемещений, реализующего способ. Устройство содержит источник 1 питания, первую 2 и вторую 3 обмотки чувствительных элементов.дифференциального индуктивного датчика, первый 4 и второй 5 компенсационные элементы, включенные совместно с обмотками 2 и 3 в мостовую схему, магнитопроводный якорь 6, первый формирователь 7, подключенньш к источнику 1 питания, элемент 8 задержки и блок 9 отбора и запоминания аналогового сигнала в виде второго формирователя 10, ключа 11 и ячейки 12 памяти. Устройство работает следующим образом. Переменное напряжение источника 1 питания подается на мостовую схему, образованную обмотками 2 и 3 чувствительных элементов и компенсационными элементами 4 и 5. Перемещение якоря 6 вызывает изменение индуктивностей обмоток 2 и 3 чувствительных- элементов индуктивного дифференциального преобразователя. В измерительной диагонали а - Ъ мостовой схемы выделяется разностное напряжение, поступающее на входы ключа 11 блока 9 отбора и запоминания аналогового сигнала. При прохождении уровня питающего напряжения из области отрицательных в область положительных значений срабатывает первый формирователь 7, сигнал с выхода которого через эле- . мент 8 задержки .поступает на вход второго формирователя 10 блока 9
Время задержки элемента 8 устанавливается равным.
л t f 4 г - l-Ti-arctd -г-г|,
oov bcoLol т.е. ключ 11 открьшается коротким
выходным импульсом формирователя 10 в те моменты времени, когда Uy в выражении (5) равно 0. Через открытый ключ 1-1 разностное напряжение с диагонали сз| - Ь мостовой схемы поступае в ячейку 12 памяти, где запоминается
,до момента следующего срабатьшания ключа 11,
Изобретение позволяет повысить точность измерения за счет уменьшения динамической погрешности путем устранения из результата измерения составляющей- сигнала, вызываемой движением с постоянной скоростью якоря индуктивного дифференциального преобразователя перемещений.

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2121129C1 |
| Преобразователь перемещений | 1987 |
|
SU1441175A1 |
| Преобразователь перемещений | 1990 |
|
SU1768935A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2036413C1 |
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2007691C1 |
| Устройство для преобразования перемещений | 1983 |
|
SU1167417A1 |
| Измерительный преобразователь перемещения | 1983 |
|
SU1089395A1 |
| Электрическая машина с вентильно-механическим коммутатором | 1988 |
|
SU1786600A1 |
| Способ электрических измерений с применением параметрического мостового преобразователя | 1988 |
|
SU1762245A1 |
1. Способ преобразования перемещений при помощи дифференциальных индуктивных датчиков, заключающийся в том, что переменным напряжением запитьшают обмотки чувствительных элементов и компенсационные элементы, срав-нивают напряжения на обмотке чувствительного элемента и на компенсационном элементе и выделяют, их разность, по которой судят о ве|1ичине перемещения, отличающийся тем, что, с целью повышения точности преобразования путем снижения динамической погрешности, вьщеленную разность дискретизируют с запаздыванием по отношению к началу периода питающего напряжения, величину которого определяют расчетным цутем из условия равенства нулю составляющей, которая представляет собой сумму величин, пропорциональных соответственно скорости перемещения якоря и активному сопротивлению обмотки чувствительного элемента. 2. Устройство для преобразования перемещений, содержащее источник питания, магнитопроводный якорь, обмотки чувствительных элементов, компенсационные элементы, соединенные с обмотками Чувствительных элементов по мостовой схеме, подключенной диагональю питания к источнику питания, отличающееся тем, что, с целью повышения точности измерения (Л путем снижения динамической погрешности, оно снабжено первым формирователем, подключенным к источнику питания, элементом задержки, включенным На выходе первого формирователя, -и блоком отбора и запоминания аналоговых сигналов в виде второго формиро 4;i вателя, вход которого подключен к О5 выходу элемента задержки, ключа, инсл формационные входы которого подклю4 чены к измерительной диагонали мостовой схемы, образованной Ъбмотками чувствительных элементов и компенсационными элементами, а управляющий вход - к выходу второго формирователя, и ячейкой памяти, включенной на выходе ключа.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № Г,77319, кл | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Федотов А.В | |||
| Расчет и проектирование индуктивных измерительных устройств | |||
| М., Машиностроение, 1979, с | |||
| Топочная решетка для многозольного топлива | 1923 |
|
SU133A1 |
| - . | |||
