интегратор 26, бЛок сравнения 30, ре- гулятор 29, сумматор 28, сумматор 25, блок деления 21, к которому подключены две параллельные цепи, одна из которых содержит блок умножения 20, интегратор 18, блок умножения 14, сумматор 12, выход которого подключен к входу блока сравнения 13. Вторая цепь содержит последовательно соединенные блок умножения 17, интеграгг тор 16, блок умножения 11, выход которого подключен к первому входу сумматора 12, а его второй вход 1
Изобретение относится к области автоматического управления и регулирования и может быть использовано в системах автоматического,-управления объектами с переменным парамет- рами„
Цель изобретения - повьшение точности устройства.
На чертеже представлена блок-схема устройства для идентификации объекта, где x(t) и х (t) - первый и второй входы, объекта идентификации; Y(t) - выход объекта идентификации .
По аналогии может быть построено устройство и для большего числа входов .
(
Устройство для идентификации объета содержит объект 1 идентификации, первый 2, второй 3 и третий 4 датчи- ки, второй источник 5 постоянного сигнала, второй 6 и третий 7 блоки сравнения, третий 8 и четвертый 9 источники постоянного сигнала, четвертый блок 10 сравнения, четвертый блок 11 умножения, первый сумматор 12, первый блок 13 сравнения, второй блок 14 умножения, детектор 15 знака, второй интегратор 16, третий бл 17 умножения, первый интегратор 18, блок 19 задержки, первый блок 20 умножения, блок 21 деления, пятый . блок 22 умножения, пятый блок 23
к блоку сравнения 6 и квадратору 27, к входу сумматора 25 подключен квадратор 24, Первый вход блока сравнения 7 соединен с третьим источником постоянного сигнала 8, а второй вход- с вторым датчиком 3. Выход датчика 2 подсоединен к первому входу блока сравнения 6, второй вход которого подключен к источнику постоянного сигнала 5. Источник постоянного сигнала 9 подключен к входу блока 10. Выход блока 13 подключен к входу блока 21. 1 ил.
5
0
5
сравнения, второй квадратор 24, второй сумматор 25, третий интегратор 26 первый квадратор 27, третий сумматор 28, регулятор 29, шестой блок 30 срав- н€шия, первый источник 31 постоянного сигнала, задатчик 32.
В качестве объекта 1 идентификации может (глужить, например,, барабанный окомкователь. Тогда третьим датчиком 4 может быть влагомер, а первым 2 и вторым 3 датчиками - ленточный весоиз- меритель.
Устройство для идентификации объект та работает следутощим образом.
Входные воздействия объекта 1 идентификации X (t) и Xj(t) измеряются первым 2 и вторым 3 датчиками, сигналы с которых поступают соответственно на второй 6 и третий 7 блоки сравнения, где из них вычитаются сигналы с выходов второго 5 и третьего 8 источников постоянного сигнала, например, о средних значениях х (t) их(t), Выход объекта 1 идентификации Y(t) измеряется третьим датчиком 4, выходной сигнал которого подается на четвертый блок 10 сравнения, где из него вычитается выходной сигнал четвертого источника 9 постоянного сигнала о среднем значении Y(.t).
Адаптация коэффициентов ki(t) объекта 1 идентификации осуществляется согласно выражения
в котором y(t), Xj (t) приращения выходного и входных сигналов о ъекта идентификации; у(t) - адаптируемьй параметр; Т - постоянная времени интегрирования.
Для реализации выражения (1) сиг- лы X (t) и x,(t) с выходов второгр 6 и третьего 7 блоков сравнения умножаются соответственно в четвертом 11 и втором 14 блоках умножения на сигналы k ;(t) и k (t) с выходов второго 16 и первого 18 интеграторов. Сигналы о полученных произведениях суммируются в первом сумматоре 12 и результирующий сигнал вычитается в первом блоке 13 сравнения из сигнала y(t) с выхода четвертого блока 10 сравнения. Выходной сигнал первого блока 13 сравнения о числителе подынтегрального выражения (D поступает на второй вход блока 21 деления. При фсзрмировании сигнала о знаменателе подынтегрального выражения (1) сигналы X (t) и X (t).возводятся в квадрат соответственно в первом 27 и втором 24 крадраторах и подаются на второй сумматор 25. Сюда же пос-- тупает и выходной сигнал третьего сумматора 28 У (t) С выхода второго сумматора 25 сигнал поступает на блок 21 деления. Сигнал о полученном частном умножается на сигнал х(t) в третьим блоке 17 умножения, интегрируется вторым интегратором 16 и результате получается сигнал k(t), который поступает на вход четвертого блока умножения и на первый выхо устройства. Аналогично с помощью первого блока 20 умножения и первог интегратора 18 определяется сигнал k,(t), который с выхода первого интегратора 18 поступает на второй выход устройства.
Для адаптации параметра Ji (t) производится анализ свойств невязки
55
Y(t) - ) k. (t) X j(t)3 . Свойства Формула изобретения
невязки характеризуются показателем в виде аналога коэффициента знаковой
x.(t)dt ,2, (1)
автокорреляции. При его расчете сигнал о невязке с выхода первого блока 13 сравнения преобразуется детектором 15 знака с законом функционирования:
(t)
BbW
1 при
- 1 при
евх)
./«
г о
0,.
0
5
где „., (t) иС (t) - выходной и входDP лОХ
ной сигналы детектора знака.
gb,x (t) задержи- t в блоке 19 за0
5
0
5
0
Затем сигнал Е вается на время держки, перемножается в пятом блоке 22 умножения и. сглаживается низкочастотным фильтром, реализованн ым . . с помощью третьего интегратора 26 и пятого блока 23 сравнения. Сглаженное значение произведения вьи () вых (t-T) стремится к +1, если невязка на длительном интервале времени имеет один и тот же знак, т.е. оцениваемые коэффициенты k.j(t) изменяются плавно. Если kjCt) измеЛ
няются быстро, то невязка получается знакопеременной и указанное произведение стремится к нулю. Интервал времени 1 выбирается экспериментальным .путем.
Задатчиком 32 устанавливается желаемое значение показателя свойств невязки из интервала 0-1, и из выходного сигнала задатчика 32 в шестом блоке 30 сравнения вычитается сигнал о фактическом значении показателя свойств невязки. Сигнал о полученной разности идет на регулятор 29, например, с пропорциональным законом регулирования. Сигнал с выхода регулятора 29 о корректировке значения : алгебраически суммируется с выходным сигналом У первого источника 31 постоянного сигнала и подается на третий вход второго сумматора 23.
Устройство для идентификации объекта, -содержащее три датчика, первый
5 129 квадратор, первый источник постоянного сигнала, последовательно включенные первый блок умножения, первый интегратор, второй блок умножения, первый сумматор и первьш блок сравнения, последовательно включенные второй квадратор, второй сумматор, блсж деления, третий блок умножения, второй интегратор и четвертьш блок умножения, выход которого под- ключен к второму входу первого сумматора, выход первого блока сравнения соединен через блок деления с первым входом первого блока умножения, выход первого квадратора под- ключен к второму входу второго сумматора, входы первого и второго датчика связаны с первым и вторым входом объекта идентификации, выход которого соединен с входом третьего датчика, выходы второго и первого интеграторов соединены,соответственно с первым и вторым выходами устройства, отличающееся тем, что, с целью повышения точности уст- Ьойства, в него введены задатчик, второй, третий и четвертый блоки срав нения, второй, третий и четвертый источники постоянного сигнала, последовательно включенные детектор знака,
Составитель А.Лащев Редактор Н.Егорова Техред М.Ходанич Корректор А.Обручар
Заказ 888/50 Тираж 864 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
блок задержки, пятый блок умножения, пятый блок сравнения, третий интегратор, шестой блок сравнения, регулятор и третий сумматор, второй вход которого соединен с выходом первого источника постоянного сигнала, а выход - с третьим входом второго сумматора, выход первого блока сравнения подключен червз детектор знака к второму входу пятого блока умножения, выход третьего интегратора - к второму входу пятого блока сравнения, выход задатчика - к второму входу шестого блока сравнения, выходы первого, второго и третьего датчиков соединены с первыми входами соответственно второго, третьего и четвертого блоков сравнения, вторые входы которых соединены с-выходами соответственно второго, третьего и четвертого источников постоянного сигнала, выход второго блока сравнения подключен к входам первого квадратора, третьего и четвертого блоков умножения, выход третьего блока сравнения - к входам второго квадратора, первого и второго блоков умножения, выход четвертого блока срав нения-к второму входу первого блока сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система контроля и регулирования | 1982 |
|
SU1070507A1 |
| Адаптивный прогнозатор производственных показателей | 1989 |
|
SU1658175A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Управляемый сглаживающий фильтр | 1982 |
|
SU1061250A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Устройство для адаптивной идентификации объекта | 1985 |
|
SU1305633A2 |
| Регулирующее устройство | 1981 |
|
SU980069A1 |
| Управляемый фильтр | 1981 |
|
SU1004962A1 |
| Сглаживающий фильтр | 1983 |
|
SU1117583A2 |
Устройство для идентификации объекта относится к области систем управления и позволяет повысить точность идентификации. Устройство содержит объект идентификации 1, к выходу которого подключены последовательно соединенные датчик 4, блок сравнения 10, блок сравнения 13, детектор знака 15, блок задержки 19, блок умножения 22, блок сравнения 23, у«; кэ со. 00 сх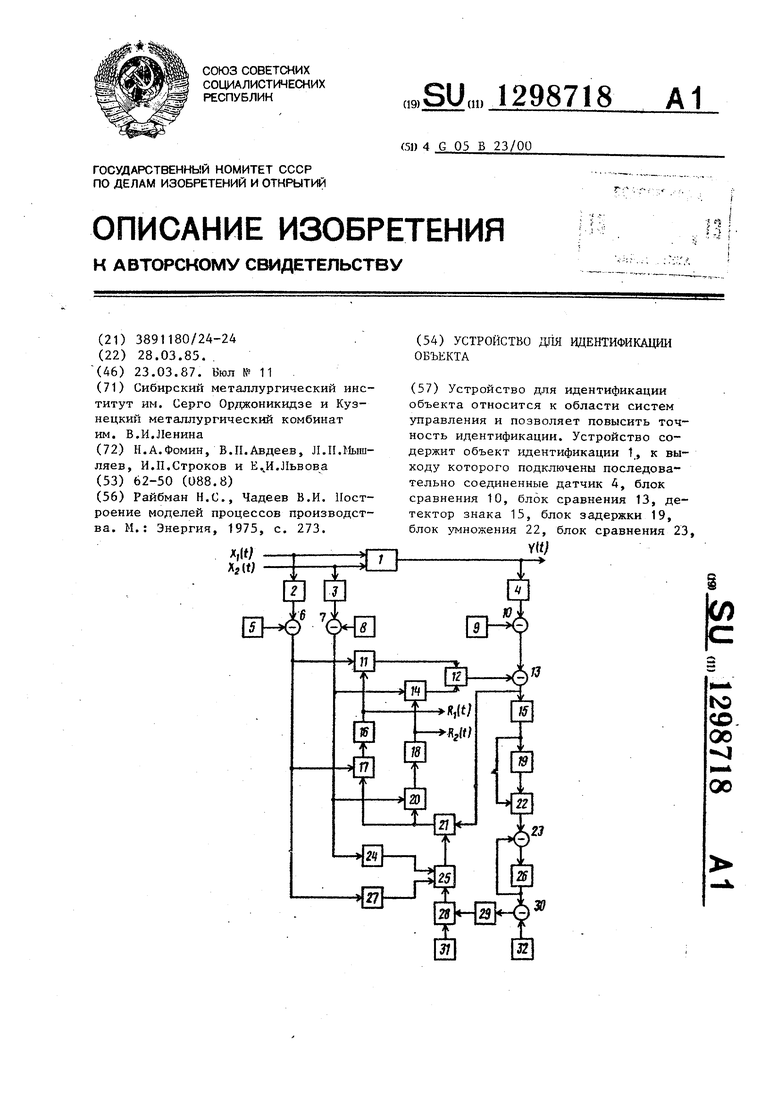
| Райбман Н.С., Чадеев В.И | |||
| Построение моделей процессов производства | |||
| М.: Энергия, 1975, с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU273A1 |
