блока экстраполяторов, выход первого элемента адаптации первого блока элементов адаптации соединен с дополнительным входом зкстраполятора, выходы остальных элементов адаптации первого блока элементов адаптации подключены к соответствующим дополнительным входам экстраполяторов первого блока экстраполяторов, схему адаптации, первый вход которой соединен с выходом четвертого фильтра низкой частоты., второй вход с выходом второго элемента сравнения, а выход - с дополнит.ельным входом первого масштабирую1цего элемента, первый вход первого сумматора соединен с выходом второго сумматора, выход третьего элемента сравнения - с вторым входом четвертого элемента сравнения, отличающийся тем, что, с целью повышения эффективности управления, в него введены пятый фильтр -низкой частоты, второй блок экстраполяторов, второй и третий блоки элементов адаптации, последовательно включенные третий блок экстраполяторов,блок сумматоров и второй блокмасштабирующих элементов, причем вход пятого фильтра низкой частоты согдинен с выходом первого масштабирующего элемента, а выход - с первыми входами экстраполяторов третьего блока экстраполяторов, с первыми входами элементов адаптации третьего блока элементов адаптации и с вторым входом пятого элемента сравнения вторые входы элементов адаптации третьего блока элементов адаптации соединены с соответствующими выходами экстраполяторов третьего блока экотг аполяторов, а выходы - с дополнительными входами экстраполяторов третьего блока экстраполяторов, выход второго фильтра низкой частоты соединен с первыми входами экстраполяторов второго блока экстраполяторов и первыми входами элементов адаптащ-ш второго блока элементов адаптации, вторые входы элементов адаптации второго блока элементов адапта1щи соединены с соответствующими выходами экстраполяторов второго блока экстраполяторов, а выходы - с соответству-ющями дополнительными входами экстраполяторов второго блока экстраполяторов, вьпсод элемента экстраполяции соедине с вторым входом первого сумматора блока сумматоров, а вторые входы остальных сумматоров блока сумматоро .соединены с соответствующими BbLx:oдами экстраполяторов второго блока экстраполяторов, выходы масштабирующих элементов второго блока масштабирующих элементов соединены с соответствующими входами первого сумматора 
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Система управления объектом с несколькими управляющими входами | 1985 |
|
SU1287105A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| Регулятор | 1980 |
|
SU903802A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| РЕГУЛЯТОР | 2011 |
|
RU2448354C1 |
) АДАПТИВНЫЙ ПРОГНОЗИРУЮЩИЙ РЕГУЛЯТОР, содержаний последовательно Bj nj04eHHbie первый элемент сравненик, первый фильтр низкой частоты, обратную модель объекта, второй элемент сравнения, третий элемейт сравнения, второй фильтр низкой частоты и элемент экстраполяции последовательно включенные, .первый 8 сумматор, исполнительньй орган 9, третий фильтр 10низкой .частоты и первый элемент 11задержки, выход которого соединен ;с вторым входом второго 4 элемента сравнения, последовательно включенные четвертый фильтр низкой чаЪтоты, первый масштабир тощий элемент, второй элемент задержки, выход которого соединен с вторым входом третьего элемента сравнения, последовательно включенные первый блок экстраполяторов, блок элементов сравнения и первый блок масштабирующих элементов, последовательно включенные четвертый элемент сравнения, инерционное звено и второй масштабирующий элемент, выход которого соединен с первым входом второго сумматора, остальные входы второго сумматора соединены с соответствую§ щими выхода масштабируюптих элементов первого блока масштабирующих V элементов, пятый элемент 22 сравнения, соединенньй первым входом с с выходом третьего фильтра 10 низкой . частоты, а вьжодом - с входами блог ка элементов задержки и вторым входом первого-элемента сравнения блока элементов сравнения, вторые входы N3 СО остальных элементов сравнения блока элементов сравнения соединены с соответствзтопщми выходами элементов заО tvD держки блока элементов задержки, за исключением последнего элемента задержки этого блока, выход которого подключен к первому входу четвертого элемента сравнения первый блок элементов адаптации, первые входы которых соединены с выходом второго фильтра низкой частоты, второй вход первого элемента адаптации первого блока адаптации соединен с выходом экстраполятора, вторые входы остальных элементов адаптации первого блока адаптации - с соответствующими выходами экстраполяторов первого
«
Изобретение относится к автомати MecifOMi управлению и регулированию н может быть использовано для построения систем управления технячески iи объектами, содержащими значительньте транспортные и инерционные запаздывания и подверженнымн влияни контролируемых и неконтролируемых .возмущенкй, характеристики которых изменяются ка интервале времени транспортного запаздывания
Предполагается, что динамика преобразующих каналов рассматриваемого класса объектов достаточно хорощо аппроксимируется оператором
-рГ . К -pf
и
sfDi---- : v-e LKo)- в -uifp} hi
TlplTT T( IP/Ml)
2
коэффициенты усиления kj s ш постоянные времени Т, f которого с течением времени изменяются незначительно,
у - выходная переменная объекта управления;
и,ш- регулирующее воздействие и контролируемое возмущение.
Задача упраэления заключается в обеспечении инвариантности выходной переменной объекта управления от контролируемых и неконтролируемых внешних воздействий при условии ..минимизации затрат на управление.
Примером такого рода объектов служат современные доменные печи, которые подвержены влиянию контролируатак и неконтролируемых возму3,1
.щений. В частности,к числу контролируемых возмущений относятся изменения химического состава агломерата, и коксга, а к числу неконтролируемых - изменения их гранулометрического состава,. Каналы преобразования регулирующих воздействий и контролируемък возм5ш ен1ш сверху печи с выходом нг показатели качестija чугуна характеризуются постоянными времени порядка 3-7 ч. При з-ipaBлении тепловым и шлаковым режимами доменной печи необходима минимиза1ЩЯ расхода дорогостоящего доменного кокса, а также флюсующих добавок,. уменьшение расхода которых ведет к повьппению производительности агрегата.
Для описанньк объектов известны регуляторы с косвенным измерением и экстраполяхщей неконтролируемьк возмущений,, содержащие обратные модели объектов угфавления, блоки задержки, экстраполяторы и- блоки сравнения .
Такие регуляторы не обеспечивают высокой точности регулирования изза Того, что в них не учитываются в явном --виде контролируемые возмущения .
I- .
Наиболее близким к предлага емому
является, прогнозирующий регулятор, содержащий последовательно включенные петЬвый элемент сравнения, первый фильтр низкой частоты, обратную модель объекта, второй элемент .сравнения, третий.элемент сравнения второй фильтр низкой Частоты, экстра полятор, первый сумматор, исполнительный орган, третий фильтр низкой частоты и первый элемент задержки, выход которого соединен с вторым входом второго элемента сравнения, последовательно включенные четвертый фильтр низкой частоты, первый масштабирующий элемент, второй элемент, задержки, вькод которого сое-в динен с вторьм входом третьего элемента сравнения, последовательно включенные первый блок экстраполяторой, блок элементов сравнения и первьй блок масщтабирующих элементов, последовательно включенные четвертый элемент сравнения, инерционное звено и второй масштабирующий элемент, выход которого соединен с первым входом второго сумматора, остальные входы второго сумматора
30204
соединены с вьосодами маспиаофуюsjc- эле1чэятс.в изрвого блока масшт.чбир}7ю;д1 х элемзнтов.. пятый элемент сравнения, соединенный первым эхо5 дом с выходом первого масштабирующего элемента,- вторым входом с выходом третьего фильтра низкой частоты, а выходом - с входами элементов задержки блока элементов
1C задержки и вторьш входом первого элемента сравнения блока элементов сравнения, вторые входы остальных элементов сравнения блока элементов срлзнёния соедин.::кы с выходами ментоз задерзкки блока элементов задержки, за исключением последнего элемента задержки этого блока, выход которого подключен к первому входу четвертого элемента сравнения,
2Q первый блок элементов адаптации, первые входы которых соединены с выходом второго фильтра низкой частоты, второй вход первого элемента адаптации первого блока адаптации
5 соединен с выходом экстраполятора, вторые входы остальных элементов адаптации первого блока адаптации - с выходами экстраполяторов первого блока зкстраполяторов, выход первого
„ элемента адаптации первого блока элементов адаптации соединен с дополнительным входом эчстраполятора, выходы остальных элементов адаптагщи первого блока элементов адапта1р1И с дополнительными входами экстраполятороЕ, элемент адаптации, первый вход которого соединен с выходом четвертого фильтра низкой частоты, второй вход с р,;лодом второго элемента сравнения, а выход - с дополнительKbLM входом первого масштабирз ющего элементе, второй вход первого сумматора соединен с выходом второго сумматора, третий вход - с выходом первого .гасштабирующего элемента, выход третьего элемента сравнения соединен с вторым входом четвертого элемента сравнения.
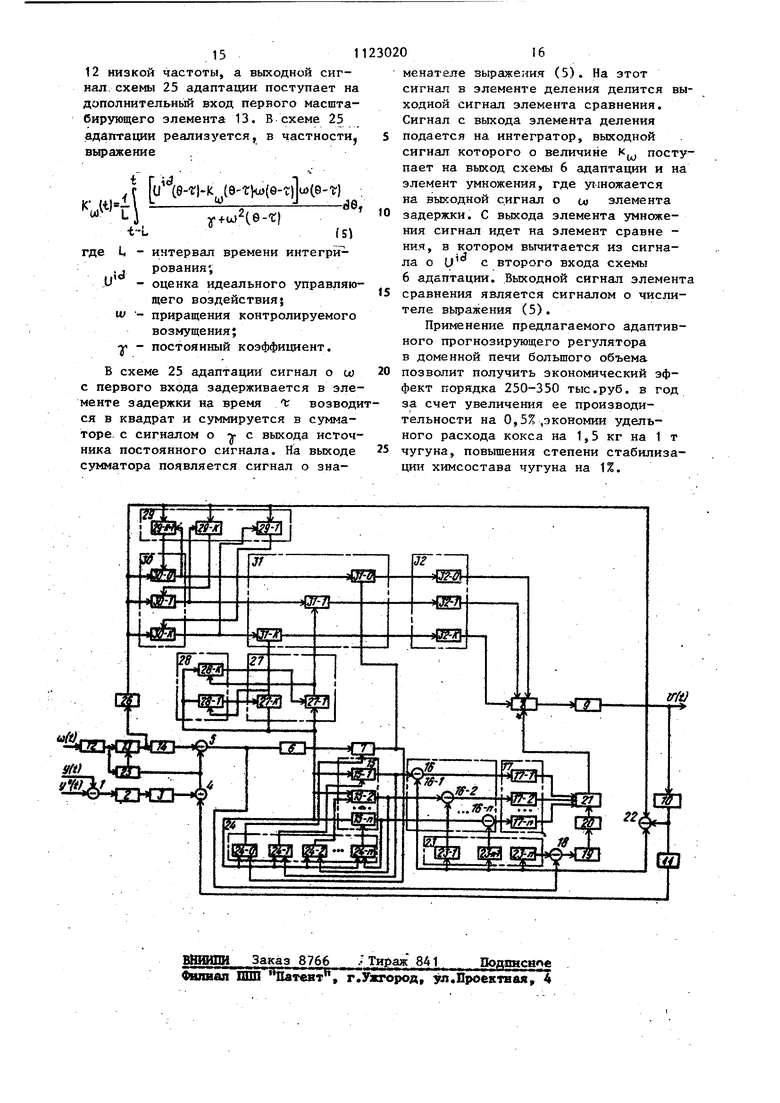
В прогнозирующем регуляторе с похмощью первого и второго элементов сравнения., первого фильтра низкой частоты, обратной модели объекта и элемента задержки восстанавливаются с запаздыванием оценки идеалы 5 ных управляющих воздайствий. Затем эти оценки пересчитьгааются на базовые условия контролируемых возГ ущений, для чего используются четвертый фильтр низкой частоты, первый масштабирующий элемент, второй элеьгент задержки и третий элемент сравнения. Пересчитанные таким образом (приведенные) оценки идеальных (Управляющих воздействий экстраполируются по траектории с помощью экстраполятора и первого блока экстраполяторов. Экстраполированное на предстоящий момент времени управляющее воздействие корректируется в зависимости от раэности между фактически реализованными ч оценками идеальных:, а также между фактически реализованными и экстраполированными оценками идеальных управляющих воздействий. Для зтих целей служат блок элементов сравнения, первый блок масштабир тощи элементов, первый и второй сумматоры блок элементов задержки, четвертый и пятый элементы сравнения, инерилонное звено и второй масштабирующий элемент. Скорректированное управ о ядащее воздействие пересчитывается ка условия фактических контролируемы возмущекий, для чего введена связь первого г-тасщтабирующего элемента с вторым сумматором. Полученное на выходе Btoporo сумматора управляющее воздействие реализуется, исполнительк0лм органом. Для -повышения эффективности прогнозирующего регулятора вве дена адаптация параметров экстраполя торсв и коэффициента первого масштабирующего элемента с помощью соответстьч нно первого блока элементов адаптации и элеме та адаптации А. 1едоста ок известного прогнозирующего регулятора заключается в низ кой эффективности управления. Это объясняется большими затратами на yi asneime из-за того, что регулирующие воздействия вырабатываются в отват не только на низкочастотные, и на высокочастотные- возмущения, которые могут фильтроваться объектом управления в силу его инерционности. Цаль изобретения - повьгаение эффективности управления. Поставленная цель достигается тем, что в прогнозирзпопр й регулятор, содержащий 4Тоследовательно включенные первый элемент сравнений, первый фильтр низкой частоты, обратную. модель объекта, второй элемент сравне-аия, третий элемент сравнения, второй фильтр низкой частоты и элемент экстраполяции, последовательно 1 06 включенные первый сумматор, исполнительный орган, третий фильтр низкой частоты и первый элемент задержки, выход КОТОР0ГО соединен с вторым входом второго элемента сравнения, последовательно включенные четвертый фильтр низкой частоты, первый касштабируюрщй элемент, второй элемент задержки, выход которого соединен с вторым входом третьего элемента сравнения, последовательно включенные первый блок экстраполяторов, блок элементов сравнения и первый блок масштабируюш 1х элементов, последовательно включенные четвертый элемент сра1знения, инерционное звено и второй,масштабируюп5 й элемент, выход которого соединен с первым входом второго сумматора, остальные входывторого сумматора соединены с соответствующими выходами 1-1асщтабир5тощих элементов первого блока маси1табирую1цих элементов, пятый элемент сравнения, соединенный первым с выходом третьего фильтра низкой частоты, а выходом - с входами блокг элементов i задержки и вторым входом первого элемента сравнения блока элементов сравнения, вторые входы остальных элементов сравнения блока элементов сравнения соединены с соответстнующи1«1 иыходами элементов задержки блока элементов задержки, за исключением последнего элемента задержки этого блока, выход которого подьслючен к первому входу четвертого элемента сравнения, первый блок элементов адаптации, первые входы которых соединены с выходом второго фильтра низкой частоты, второй вход первого элемента адаптации первого блока адаптации соединен с выходом экстрапол ятора, вторые входы остальных элементов адаптащ и первого блока адаптации - с соотнгтствуювд ми выходами экстраполяторов первого блока экстраполяторов, выход первого элемента адаптации первого блока элементов адаптации соединен с дополнительным входом экстраполятора, выходы остальных элементов адаптации первого блока элементов адаптации, подключены к соответствующим дополнительным входам экстраполяторов первого блока экстраполяторов, ,схему адаптации, первый вход которой соединен с выходом четвертого фильтра низкой частотьц Бтсфой вход - с выходом вт рого элемента сравнения, а выход с дополнительнмм входом первого , масштабирующего элемента, первьш Бг;од первого сумматора соединен с выходом второго сумматора, выход третьего элемента сравнения - с вто рым входом четвертого элемента срав нения, введены пятый фильтр низкой частоты, второй блок экстраполяторо второй и третий блоки элеменгов ада тации, последовательно включенные третий блок экстраполяторов, блок сум -1аторов и второй клок масштаби рующих элементов, причем вход пято- го фильтра низкой частоты соединен с выходом первого масштабирующего элемента, а выход - с первьп-ш входа ми экстраполяторов третьего блока экстраполяторов, с первыми входашл элементов адаптации третьего блока элементов адаптации и с вторым входом пятого элемента сравнения, вторые входы элементов адаптации третьего блока элементов адапта 1.1;ии соединены с соответствующими выходами экстраполяторов третьего блока экстраполяторев, а вьжоды с дополнительными входами экстраполяторов третьего блока экстраполяторов, выход второго фильтра низкой частоты соединен с первыми входами экстраполяторов второго блока экстраполяторов и первыми входами элементов адаптации второго блока элементов адаптации, вторые входы элементов адаптации второго блока элементов адаптации соединены с соо ветствуюпщм- выходами экстраполяторов второго блока экстраполяторов а выходы - с соответств тощими допол нительными входами экстраполяторов второго блока экстраполяторов, выход элемента экстраполяции соединен с вторым входом первого сз матора блока сумматоров,;а вторые входы ос тальных сумматоров блока cy шaтopoв соединены с соответствующими выхода ми экстраполяторов второго блока экстраполяторов, выходы масштабирую щих элементов второго блока масштаб рующих элементов соединены с соответствующими входами первого сумматора. Введение новых блоков и связей позволяет экстраполировать контроли руемые возмущения и оценки приведен ных идеальных управляющг х воздейст Еий, KraoHMepj HP, интервал Пг1мя н сист-з пь. грот.зг-сд 1ть свертку экстра11ол;фованнь х упразляющих воздействий п:- ем суммирования с несевыми коэффициентамии ОКОНЧИ гель: ые управляющие воздействия выраГтатывать на основе полученных таки образом оценок управляющих воздействий. Управляющие воздействия вырабатываются с уигто - б-удущего поведения контролируемых и неконтролируемых возмущений, что позволяет не реагировать на относительно высокочастотные возм.щения, которые фильтруются объектом управления, и тем самым уменьшать затраты на управление и в целом повысить точность регулирования . На чертеже приведена блок-схема предлагаемого регулятора. Адаптивный прогнозир тсп1ий регулятор содержит первый элемент 1 сравнения, первый фильтр 2 низкой частоты, обратную модель 3 объекта, второй 4 и третий 5 элементы сравнения, второй Фильтр 6 низкой частоты, элемент 7 экстраполяции., первый сумматор 8,, исполнительный орган 9, тр.етий фильтр 10 низкой частоты, первый элемент 11 задержки, четвертый фильтр 12 низкой частоты, первый масштабирующий элемент 13, второй элемент 14 задержки, первый блок 15 экстраполятороз, блок 16 элементов сравнения, первый блок 17 масштабирующих элементов, четвертый элемент 18 сравнения, инерционное звено 19, второй масштабирующий элемснт 20, второй cy мaтop 21, пятый элемент 22 сравнения, блок 23 элементов задержки, первый блок 24 элементов адаптации, схе му 25 адаптации, пятьй фильтр 26 низкой частоты, второй блок 27 экстраполяторов, второй 28 и третий 29 блоки элементов адапта 1щи, третий блок 30 экстраполяторов, блок 31 cy мaтopoв и второй блок 32 масштабирующих элементов. Схема 25 адаптации содержит источник постоянного сигнала, последовательно включенные-элемент задержки, квадратор, сумматор, элемент деления, интегратор, элемент умножения и элемент сравнения, второй вход которого соединен с вторым входом схемы 25 адаптации, а выход - с втог рым входом блока деления, выход неточника постоянного сигнала подключен к второму входз сумматора, вход блока задержки соединен с первгым входом схемы 6 адаптахщи, э выход с вторьм входом блока умножения, выход интегратора подключен к выходу схемы 6 адаптации Сз. Блоки 24,28 и 29 адаптации постоя ных времени sKcrpanonKtopoB содержат каждый источник постоянного сигнала, первый масштабирующий элемент, последовательно включейные цервьй злемент сравкелия, первый интегратор, первый элемент задержки, второй элемент сравнения, элемент деления, второй масштабирующий элемент, третий элемент сравнения, второй интегратор, второй элемент задержки, четвертьй элемент сравнения и cyi-шатор выход которого соединен с вторым входом элемента деления, а вход с Бькодом источника постоянного сигкала, выход первого интегратора подключен к BtopoMy входу второго эле мента сравнения, выход второго инте) ратора к второму входу четвертого сривнен-ня и через первый масвггабкрз.ющий элемент к второму входу тре/.ьего элемента сравнения, первый и второй входы элемента а/гаптации соединены сротве1-ствбйно с первым и вторым входами первого элемента сравнения, выход третьего элемента сравиекяя подключен к выходу улемента адаптации 41. Па чертеже указаны и( приращение коитрояируймого возмущения в i й момент времени относительно спорного (базового) згровня; Щ вьксдная переменная об-ьекта управления; - задание на выходную перем.еянуш; uCtf - управляющее воз действие., Адаптивный прогнозйруюящй регулятор работает следующим образом, Кз измерйемого выходного сигнала Y{t o6beKTa з первом элементе 1 срав вычитается сигнал 6 задании .(t|Ha выходную переменную. Получен ный сигнал поступает на пгрвьй филь 2 Низкой частоты, в котором подавляется высокочастотная помеха, что повышает точгность дальнейшего преоб раьования сигнала. С вьжода первого фильтра 2 низкой частоты сигнал пйс туяает на обраТ1 ую модель 3 объекта без залаздызания,. в частности пропорцконально-диффеоенциалькоа010 но. Выходной сигнал обратной модели 3 объекта вычитается so втором элементе 4 сравнения из выкодного сигнала первого элемента 11 задержки, о фактическом управляющем воздействий реализованном в (Ч:-1Г)-й момент ;времени. В результате ка выходе второго эламента 9 сравнения появляется сигнал об оценке идеалького управляющего воздействия u(i.t).U(t-r)F; Y(tbY(t) , (21 сГ где U (if)- оценка идеального управляющегс воздействил . , . в момент времени (t-t}, Т - время транспортного запаздыванияi F - обратная модель объекта без учета запаздываСигнал о приращениях контролируемых возмущений U){ir) подается на вход четвертого фильтра 12 низкой частоты, где подавляются высокочастотные помехи, а затем умножается к первом каЛК.(табирующам элементе 13 на коэффн1щент Кц пересчета приращений контролируемых возмущений 3 приращение управляющего воздействия. Выходной сигнал первого майитабирующего элемента 13 задерживается на время /С во втором элементе 14 задержки и вычитается в третьам элементе 10 сравнения из сигнала об U {t-E} с выхода второго элемейта 4 сравнения. Вьйсодной сигнал третьего элемента 5 сравнения является сигналом об oiienKe идеального управляющего во действия, приведенной расчетным путем к базовому уровню контролируемого возмущения (сигнал о приведенном управляющем воздействии). Для экстраполяции приведенного упрагъ яющего воздействия вьгхьдной сигнал третьего элемента 5 сравнения подается на второй фильтр 6 низкой, частоты, в котором усредняется на интерпале времени 41Г (1/10-1/20) Т для 3KCTpanojM4HH траектории этого сигнала конечным числом экстраполяТоров, Выходной сигнал второго фильтра б низкой частоты подается на экстраполятор 7 и на ькстраполяторы второго блока 27 эксТраполятороВ; выполненных, нагфимер, в виде форс::2рующих йиеньев. Б экстраполяторе 111 17 сигнал экстраполируется на интервал времени (. i в экстралоляторе 27-1 второго блока 27 экст раполяторов на интервал времени ( + ), в экстраполяторе 27- К на интервал времени ( до), где И- Q а G интервал памяти систеК-2 - аАналогично приведенному управляю щему воздействию экстраполируется траектория корректировок управляющи воздействий по приращениям контролируемых возмущений. Для этого выхо ной сигнал первого масштабирующего элемента 13 усредняется на интервале времени ДТ в пятом фильтре 26 низкой частоты и экстраполируется в экстраполяторе 30-0 третьего блока 30 экстраполяторов на интервал времени ЛС , в экстраполяторе 30-1 на интервал времени 2&V и в экст раполяторе 30- К на интервал времени КЛТ . Выходные сигналы экстраполяторов второго блока 27 экстраполяции суммируются с соответствующими выходными сигналами экстраполяторов третьего блока 30 экгтраполяторов в сумматорахблока 31 сумматоров. На выходе блока 30 сумматоров получ ется экстраполированная на интервал памяти системы траектория управляющего воздействия, обусловленная кон ролируемыми и неконтролируемыми возмущениями. Для получения управляющего воздействия в текущий момент времени производится свертка полученной траектории путем взвещеннсго суммирования управляющего воздействия в отдельные моменты времени, С этой целью выходные сигналы сумматоров блока 30 сумматоров умножаются на весовые коэффигр енты в соотзетствую масштабирующих элементах второго блока 32 масщтабирующих элементов и суммируются в первом суммато- ро 7. Коэффициенты в масштабирующих элементах второго блока 32 масштабирующих элементов выбираются таким образом, чтобы убывали в будущее, например, по экспоненциальному закону и отражали динамику канала регулированияи точность экстраполя ции возг-гу цений, 1 Остальные блоки адаптивйого прог нозирующего регулятора предназначен 0;2 для реализапик корректирующей обратной связи, С этой целью опредатяется разность между фактически приведеннстм и идеальным приведенньм :утравляюш5:м воздействием на интервале времени oT(i-Q) дo(t-tf,.a также разность между фа :тически приведенным и экстраполированным приведенным управляющим воздействием на интервале от (i-r) до t. С помощью модели кана.па регулирования без учета запаздывания прогнозирз ется влияние полученньк разностей на ъ-г..оц,ную переменную объекта управления. Найденное изменение -выходной переменкой с помощью П-звека (пропорционального регулятора) пересчитывается в корректировку управляющего воздействия по обратной связи. Для реализации описанной логики экстраполируется с помощью первого блока 15 экстраполяторов траектория выходного сигнала второго фильтра 6 низкой: частоты на интервале времени от (t-t) до t. В экстраполяторе 15-1 первого блока 15 экстраполяторов производится экстраполяция .на момент времени (), в экстраполяторе 15-2 на момент времени (-f - t -Ь .Zdt:) j в экстраполяторе iS-n- номентнт времени (t-jr-+dfh) -fc. Сигнал о корректировке управляющего воздействия по приращениям контролируемых возмущений с выхода пятого фильтра 4 низкой частоты вычитается в пятом элементе 22 сравнения из сигналао реализованном управляющем воздействии с выхода третьего фильтра 10 низкой частоты. Выходной сигнал пятого элемента 22 сравнения задерживается в элементе 23-1 задержки блока 23 элементов задержки на интервал времени /зг в элементе 23-ti+1 задержки - на интервал времени (n-1)-4t- в элементе задержки 23-h на на интервал времени itdS., В блоке 16 элементов сравнения определяется разность между траекториям - экстраполированных и фактических приведенных управлений на интервале времени от () до -t. Для этого в элементе 16-1 сравнения блока 16 элементов сравнения из выходного сигнала экстраполятора 15-1 первого блока 15 экстраполяторов выхштается выходной сигнал пятого элемента 22 сравнения, в элементе 16-2 сравнения - выходной сигнал элемента 23-1 задержки блока ,23 задержки, в элементе 16-г сравнения зыходной сигнал элемента 23-п-1 задержки. Сигналы о полученных разн тях умножаются на весовые ко ффициенты в соответствующих масштабиру щих элементах первого блока 17 масш бирующих элементов и суммируются во втором сумматоре 23-2 с В четвертом элементе 18 сравнения из выходного сигнала третьего элемента 5 сравненяя вычитается выходной сигнал элемента 23- задержки блока 23 элементов задержки. Сигнал с выхода че вертого элемента 18 сравнения преобразуется в инердаонном звене 19, умножается на весовой коэффициент во втором масштабирующем элементе 20и подается на второй сумматор 21, на выходе которого появляется сигнал о корректировке управляющег воздействия по обратной связи. Выходной сигнал второго суммато 21подается на одан из входов перв го сумматора 7, где алгебраически cjMMHpyeTCH с рассчитанным по возмущениям управляющим воздействием. Полученное таким образом управляющ воздействие реализуется с помощью исполнительного органа 9 и поступа ет на объект управления. В связи с тем, что структурностатистические свойства оценок при в.еденных управляющих воздействий и меняются, производится адаптация всех экстраполяторов. При условии, что оператор каждого экстраполктор представлен выражением . ,(3) Tj - интервал экстраполяции; Тф - постоянная времени форсирующего звена, адаптацию Т soжнo производить сог ласнр закону ф(Ф тф(9и0-а. , „д t--A лх(в) 4X(e)d6 t-A . П т.(е)сЗеЛ тфсеме IJVJ i-xit-2/ .4X{ei«x() . гдеХ( входной сигнал экстраполятора, Х(в)- выходной сигнал экстраполятора;Д,В, - постоянные величины. При адаптации экстраполяторов входные и выходные сигналы подаются на входы элементов адаптации, выходы которых поступают на дополнительные входы экстраполяторов. Для реализации выражения (4) в элементах адаптации входной сигнал второго входа элемента адаптации вы- итается в первом элементе сравнения из входного сигнала второго входа, Сигнал с полученной разности лХ интегрируется в первом интеграторе, задерживается Б первом элементе задержки на время А, а затем во втором элементе сравнения вычитается из выходного сигнала первого интегратора. В результате на выходе второго элемента сравнения появляется сигнал о числителе второго члена правой части выражения (4). Аналогично с помощью второго интегратора, второго элемента задержки и четвертого элемента сравнения обрабатывается выходной сигнал третьего элемента сравнения о величине знаменате,яя. Выходной сигнал четвертого элемента сравнения суммируется в- сумматоре с выходным сигналом о В, поступаюпщм с выхода источника постоянного сигнала. В итоге появляется сигнал о знаменателе второго члена правой части выражения (4). В элементе деления выходной сигнал второго элемента срав- нения делится, на выходной сигнал сумматора, затем умножается во втором масштабирующем элементе ка постоянный коэффициент сЗ и вычитается в третьем элементе сравнения и выходного сигнала второго интегратора, умноженного в первом масштабирукнцем элементе на постоянный коэффициент 1/,А , На выходе третьего элемента сравнения появляется сигнал о величине Тф который поступает на выход элемента адаптации. Изменчивость характеристик объекта управления по отношению к контролируемым возмущениям учитывается пзтем адаптации пересчетного коэффициента Кц первого масштабирующего элемента 13. Для этого на входы схемьз 25 адаптации подаются сигналы с выхода второго элемента 4 сравнения и выхода четвертого Аипьтра
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Турецкий Хо Анализ и синтез управления с | |||
| запаздыванием | |||
| М., Машиностроение, 1974 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Построение моделей процессов производстЕй | |||
| М,, Энергия, 1976, с.273, рис.7.1 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Основы идентификации систем управления | |||
| М., Мир, 1975, с.432,433.., рис.9.2, 9.3 | |||
| А | |||
| Прогнозирующий регулятор | 1979 |
|
SU815713A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
